车辆涉水前行距离确定方法、装置、车辆、设备及存储介质与流程
本发明实施例涉及车辆,具体涉及一种车辆涉水前行距离确定方法、装置、车辆、设备及存储介质。
背景技术:
1、随着气候极端化及城市建设进程加深,驾驶员在驾车行驶过程中,越来越多的遇到车辆涉水场景,而驾驶员多因对水深预估不足,导致车辆进水。
2、相关技术中,对于车辆涉水场景,往往都是基于驾驶员发现车辆涉水事件,实时采集并测量车辆的涉水深度,该方式只能对车辆所处涉水的深度进行监测,但对车辆前方行驶路线上的未来涉水情况缺乏预测,导致车辆缺少危险预警,由于盲目前行导致车辆存在涉水熄火风险,或者驾驶员看到积水就绕路让行,导致不必要的绕远,影响行程效率。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明实施例提供一种车辆涉水前行距离确定方法、装置、车辆、设备及存储介质,以解决上述技术问题。
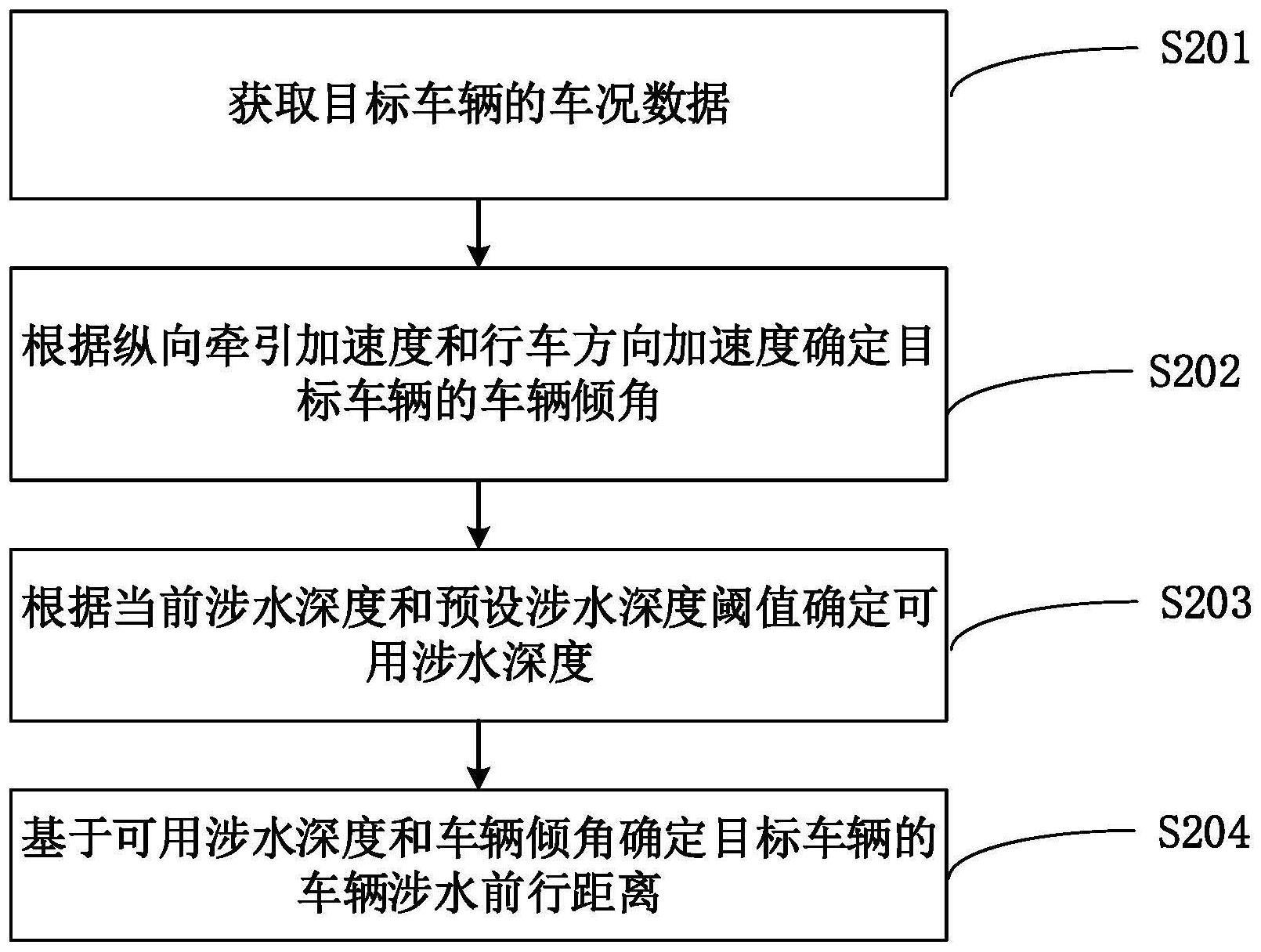
2、本发明实施例提供的车辆涉水前行距离确定方法,所述车辆涉水前行距离方法包括:获取目标车辆的车况数据,所述车况数据包括当前涉水深度、纵向牵引加速度和行车方向加速度;根据所述纵向牵引加速度和所述行车方向加速度确定所述目标车辆的车辆倾角;根据所述当前涉水深度和预设涉水深度阈值确定可用涉水深度;基于所述可用涉水深度和所述车辆倾角确定所述目标车辆的车辆涉水前行距离。
3、于本发明一实施例中,所述预设涉水深度阈值包括预设预警涉水深度、预设制动涉水深度和预设退避涉水深度中至少之一,所述预设预警涉水深度小于所述预设制动涉水深度,所述预设制动涉水深度小于所述预设退避涉水深度;若所述预设涉水深度阈值包括预设预警涉水深度,将所述车辆涉水前行距离确定为预警前行距离,若所述预警前行距离小于预设预警距离阈值,基于所述预警前行距离生成预警消息,并提示;若所述预设涉水深度阈值包括预设制动涉水深度,将所述车辆涉水前行距离确定为制动前行距离,若所述制动前行距离小于预设制动距离阈值,控制所述目标车辆制动,直至所述目标车辆停车;若所述预设涉水深度阈值包括预设退避涉水深度,将所述车辆涉水前行距离确定为退避前行距离,若所述退避前行距离小于预设退避距离阈值,控制所述目标车辆制动直至停车,待所述目标车辆停车后,控制所述目标车辆沿目标行驶方向行驶,所述目标行驶方向与所述目标车辆的初始行驶车辆相反。
4、于本发明一实施例中,基于所述可用涉水深度和所述车辆倾角确定所述目标车辆的车辆涉水前行距离之后,所述车辆涉水前行距离确定方法还包括:获取所述目标车辆的车速数据;根据所述车辆涉水前行距离和所述车速数据确定车辆可前行时长。
5、于本发明一实施例中,若所述预设涉水深度阈值包括预设制动涉水深度,根据所述车辆涉水前行距离和所述车速数据确定车辆可前行时长之后,所述车辆涉水前行距离确定方法还包括,若所述车辆可前行时长小于第一预设时长阈值,控制所述目标车辆制动;若所述预设涉水深度阈值包括预设退避涉水深度,根据所述车辆涉水前行距离和所述车速数据确定车辆可前行时长之后,所述车辆涉水前行距离确定方法还包括,若所述车辆可前行时长小于第二预设时长阈值,控制所述目标车辆回退。
6、于本发明一实施例中,根据所述纵向牵引加速度和行车方向加速度确定所述目标车辆的车辆倾角之后,所述车辆涉水前行距离确定方法还包括:获取待预测行驶距离;基于所述待预测行驶距离和所述车辆倾角确定理论涉水深度;基于所述待预测行驶距离和所述理论涉水深度确定预测涉水数据集。
7、于本发明一实施例中,基于所述待预测行驶距离和所述车辆倾角确定理论涉水深度之后,所述车辆涉水前行距离确定方法还包括:基于所述理论涉水深度和所述预设涉水深度阈值确定理论可用涉水深度。
8、于本发明一实施例中,基于所述可用涉水深度和所述车辆倾角确定所述目标车辆的车辆涉水前行距离之后,所述车辆涉水前行距离确定方法还包括:根据所述车辆涉水前行距离、车辆可前行时长和所述当前涉水深度、预测涉水数据集中至少之一生成提醒信息。
9、于本发明一实施例中,根据所述车辆涉水前行距离、车辆可前行时长和所述当前涉水深度、涉水深度预测数据、车辆倾角中至少之一生成所述提醒信息之后,所述车辆涉水前行距离确定方法还包括:通过预设展示装置对所述提醒信息进行展示,所述预设展示装置包括车辆语音播报装置和车辆显示装置中至少之一。
10、于本发明一实施例中,通过预设展示装置对所述提醒信息进行展示之前,所述车辆涉水前行距离确定方法还包括:根据所述车辆涉水前行距离和预设提醒等级区间确定当前需提醒等级,以基于所述当前需提醒等级确定所述提醒信息的展示方案;以所述展示方案通过预设展示装置对所述提醒信息进行展示。
11、本发明提供了一种车辆涉水前行距离确定装置,所述车辆涉水前行距离装置包括:车况数据获取模块,用于获取目标车辆的车况数据,所述车况数据包括当前涉水深度、纵向牵引加速度和行车方向加速度;车辆倾角确定模块,用于根据所述纵向牵引加速度和行车方向加速度确定所述目标车辆的车辆倾角;可用涉水深度确定模块,用于根据所述当前涉水深度和预设涉水深度阈值确定可用涉水深度;车辆涉水前行距离确定模块,用于基于所述可用涉水深度和所述车辆倾角确定所述目标车辆的车辆涉水前行距离。
12、本发明提供了一种车辆,所述车辆包括速度传感器、倾角传感器、涉水感应系统和控制器;所述速度传感器用于采集速度信息,基于所述速度信息确定所述车辆的纵向牵引加速度和行车方向加速度;所述倾角传感器用于基于所述纵向牵引加速度和所述行车方向加速度确定车辆倾角;所述涉水感应系统用于根据获取的车辆涉水图像确定所述车辆的当前涉水深度;所述控制器用于根据所述当前涉水深度和预设涉水深度阈值确定可用涉水深度,基于所述可用涉水深度和所述车辆倾角确定所述车辆的车辆涉水前行距离。
13、于本发明一实施例中,所述车辆还包括车辆语音播报装置、车辆显示装置、制动模块和主动退避系统中至少之一;所述控制器还用于基于所述车辆涉水前行距离生成提醒信息;所述车辆语音播报装置用于对所述提醒信息进行语音播报;所述车辆显示装置用于对所述提醒信息进行显示;所述制动模块用于当所述预设涉水深度阈值包括预设制动涉水深度,将所述车辆涉水前行距离确定为制动前行距离,若所述制动前行距离小于预设制动距离阈值,控制所述车辆制动,直至所述车辆停车;所述主动退避系统用于当所述预设涉水深度阈值包括预设退避涉水深度,将所述车辆涉水前行距离确定为退避前行距离,若所述退避前行距离小于预设退避距离阈值,控制所述车辆制动直至停车,待所述车辆停车后,控制所述车辆沿目标行驶方向行驶,所述目标行驶方向与所述车辆的初始行驶车辆相反。
14、本发明实施例提供的一种电子设备,所述电子设备包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现上述任一项实施例所述的车辆涉水前行距离确定方法。
15、本发明实施例提供的一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序被计算机的处理器执行时,使计算机执行上述任一项实施例所述的车辆涉水前行距离确定方法。
16、本发明实施例的有益效果:本发明实施例中的车辆涉水前行距离确定方法、装置、车辆、设备及存储介质,该方法通过获取目标车辆的当前涉水深度、纵向牵引加速度和行车方向加速度,根据纵向牵引加速度和行车方向加速度确定目标车辆的车辆倾角,根据当前涉水深度和预设涉水深度阈值确定可用涉水深度,基于可用涉水深度和车辆倾角确定目标车辆的车辆涉水前行距离,通过对车辆涉水前行距离的确定,能够提示车辆的驾驶员当前车辆可行驶的距离,也即车辆涉水前行距离,避免车辆盲目前行,导致超出可行驶的距离后涉水熄火,或者由于不清楚水深而盲目让路,导致行驶效率的降低,有助于提升驾驶安全性和通行效率。。
17、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!