一种基于同步带传动结构的水空两栖矢量多旋翼航行器及控制方法
1.本发明涉及无人机技术领域和水上航行器技术领域,是一种基于同步带传动结构的水空两栖矢量多旋翼航行器及控制方法。
背景技术:
2.近年来,随着跨域航行技术的不断发展,各类跨域航行器不断涌现,展现着这类航行器在各种环境、不同场景下都有不可小视的作用。然而,现阶段的此类跨域航行器在一些特殊场景下表现不尽如人意,存在着诸多的问题。
3.现阶段跨域航行器主要包括水陆两栖航行器、水空两栖航行器等,水空两栖航行器主要有固定翼式水陆两栖飞机、多旋翼式水空两栖无人机等,多旋翼式无人机采用多电机驱动,机动性强、控制灵活,但是其带载能力差、续航时间短;固定翼式飞机虽然飞行高度更高,滞空时间更长,但是其成本较高、控制困难,需要经过专门训练的飞手,同时还需要起飞和着陆的跑道,种种原因大大限制了固定翼式飞机的应用场景。
4.矢量旋翼式飞行器结合多旋翼飞行器和固定翼的诸多优点,具有垂直起降、空中悬停、高速巡检的能力,是近年来兴起的新机型,具有深远的研究意义和研究价值。本发明在矢量旋翼式飞行器的基础上进一步改进了倾转结构,在保证其成本低、飞行灵活和环境适应能力强的特点的前提下简化了倾转结构的复杂程度,将原先多个动力源控制倾转结构的控制简化为使用同步带独立控制飞行器后端的倾转结构,降低了飞行器整体的控制难度。由于使用了独特的倾转结构,飞行器采用了独特的飞行姿态,能够应对多变且复杂的环境,尤其是对于分布式鱼塘的应用,对于跨塘作业有明显优势。
技术实现要素:
5.本发明设计了一种可操作性较高、成本较低、自动化程度较高的水空两栖航行器及控制方法。其与传统飞行器和传统空气动力船的区别在于,本发明动力系统采用同步轮控制的倾转旋翼,四电机驱动,机动性强、控制灵活;倾转旋翼结构有效结合了多旋翼可悬停和固定翼长续航的优点,可以显著提高航行器的工作效率;通过舵机旋转角度可以实现船型模式和飞行模式的切换,独特的起飞方式有利于克服水面张力,方便航行器实现跨域航行,以应对不同的环境;通过倾转电机差速控制航行器的航向,保证了航行器的灵活性和稳定性。
6.本发明水空两栖航行器的技术方案为:
7.一种基于同步带传动结构的水空两栖矢量多旋翼航行器,包括航行器上层结构与下层结构,
8.航行器上层结构中,航行器的主板(32)、控制仓板(14)通过管夹(15)与主板连接杆(20)固定,主控仓(30)固定在主板(32)上,仓内集成航行器的主控系统;前侧主板支撑杆(22)两端通过三通(19)连接主板连接杆(20),起结构支撑作用,主板连接杆(20)通过三通
(19)在前侧垂直连接固定连接杆(18),在后侧通过倾转机构垂直连接倾转连接杆(1),在固定连接杆(18)和倾转连接杆(1)的两端分别固定低扭矩电机(4)和高扭矩电机(17),其中低扭矩电机通过电机夹板(2)和管夹(15)固定在倾转连接杆(1)上,通过安装孔固定22寸桨叶(3);高扭矩电机(17)与机身水平面固定30
°
夹角,通过安装孔固定30寸桨叶(16);
9.所述的航行器下层结构中,利用三通(19)与上层结构相连接,即与主板连接杆(32)连接,三通(19)与脚架竖杆(21)上端垂直连接,四根脚架竖杆(21)连接完成后整体形成一种矩形框的结构,在脚架竖杆(21)下端通过三通(19)垂直固定浮筒连接杆(25),在两浮筒连接杆(25)之间固定电池底杆(26),以增加结构稳定性,浮筒连接杆(25)通过管夹(15)与浮筒固定板(23)相连,浮筒(31)通过浮筒固定板(23)固定在航行器下层结构上,在电池底杆(26)上利用管夹(15)固定电池底板(27)安装电池仓(29),电池底板(27)与电池仓(29)之间使用滑槽(28)固定,电池仓(29)固定在靠近倾转连接杆(1)的位置上,能使整个机身重心靠后,有利于后续控制。
10.进一步,所述倾转机构中,舵机固定板(33)通过铝柱(13)垫高后与倾转夹板(7)连接,在上下倾转夹板(7)之间固定管夹(15)和轴承夹(6),管夹(15)将倾转机构与主板连接杆(20)相互固定,轴承夹(6)固定倾转轴承(5),倾转轴承(5)中穿过倾转连接杆(1),最终使主板连接杆(20)与倾转连接杆(1)垂直,在舵机固定板(33)中部通过固定角件(12)将舵机(10)固定,在舵机(10)旋转轴顶端固定主同步轮(11),主同步轮(11)通过同步带(9)带动从同步轮(8),从同步轮(8)固定在倾转连接杆(1)中部,当舵机(10)转动时,从同步轮(8)带动倾转连接杆(1)转动,从而实现低扭矩电机(4)相对机身位置的旋转,改变主升动力的矢量方向。
11.进一步,所述主板连接杆(20)与倾转连接杆(1)通过三通(19)垂直连接成h型结构,下层结构中浮筒连接杆(25)与电池底杆(26)通过脚架三通(24)垂直连接成h型结构,脚架竖杆(21)通过电池底杆(26)与三通(19)两两连接成矩形结构,航行器整体框架结构稳定性强,且能有效控制航行器整体体积,有利于提高空气动力学性能。
12.进一步,所述浮筒(31)为长120cm,宽20cm,高31cm,一头为流线型的泡沫材质结构,上方有浮筒固定板(27)用于与浮筒连接杆(25)的固定,浮筒(31)前端呈流线型有利于减少水阻。
13.进一步,所述主控仓(30)用于控制整个矢量四旋翼航行器,包括船型模式和飞行模式的切换、位姿控制;采用stm32f4系列芯片,主控仓(30)集成多种传感器,主控芯片通过can总线连接imu姿态估计模块和磁力计模块rm3100,上下行信息由can通讯芯片进行调配和处理,同时通过蜂鸣器和rgb指示灯展示航行器状态信息。在航行器飞行时由遥控器sbus接收机接收控制信号。并预留部分接口例如串口、iic、spi等,方便搭载额外设备,例如激光测距传感器、毫米波雷达等。
14.本发明的一种基于同步带的水空两栖矢量多旋翼航行器的控制方法,包括以下几个步骤:
15.步骤1,将电池仓(29)上的电源总开关打开,使得低扭矩电机(4)和高扭矩电机(17)与主控仓(30)分别上电,通过蜂鸣器的声音提示确定主控仓(30)初始化是否成功;
16.步骤2,主控仓(30)输出pwm波,给电调一个最低油门和最高油门进行校准,随后退出电调校准任务;
17.步骤3,遥控器解锁,对应通道切换为飞行模式,舵机(10)输出轴旋转,使低扭矩电机(4)与地面保持水平;
18.步骤4,拉高遥控器油门,高扭矩电机(17)先带动航行器前端抬起,机身总体呈前端翘起,机身水平面与地面夹角逐渐增大,同时舵机(10)输出轴旋转,使低扭矩电机(4)螺旋桨水平面与地面保持水平,通过主控仓(30)上的imu姿态估计模块对航行器姿态进行解算,微处理器对解算出的姿态数据以及遥控器传入的数据进行分析处理,生成期望,通过pid调节舵机(10)倾角和前后两电机转速,控制航行器完成前进、悬停等动作;
19.步骤5,航行器飞行到水域上,拉低遥控器油门,通过毫米波雷达数据进行高度控制,将航行器降低到水面上,随后高扭矩电机(17)减速,使船身水平面与水面的夹角逐渐减小直至水平,同时舵机(10)输出轴旋转,使低扭矩电机(4)与地面保持水平,着陆水面后,切换遥控器对应通道为船型模式,舵机(10)输出轴旋转,使低扭矩电机(4)与水面保持垂直;
20.步骤6,拉高遥控器油门,航行器开始航行,通过主控仓(30)上的imu姿态估计模块对航行器姿态进行解算,微处理器对解算出的姿态数据以及遥控器传入的数据进行分析处理,生成期望,通过pid调节舵机(10)倾角和低扭矩电机(4)转速,控制航行器完成前进、转弯动作。
21.本发明的有益效果是:
22.(1)本发明涉及一种基于同步带的水空两栖矢量多旋翼航行器,采用倾转旋翼作为动力来源,兼具多旋翼可悬停和固定翼长续航的优点,同时保证航行器运动速度。
23.(2)本发明采用同步带控制的倾转结构,进一步简化了飞行器的倾转结构。本发明将前端桨叶固定30
°
并使用大升力桨叶,后端采用由同步轮控制的倾转结构,相比与四个倾转结构分别单独控制四个螺旋桨的机构,本发明采用的倾转结构更加精简,使用一个可控动力输出源便可以完成对飞船的控制,大大减轻了倾转结构的重量,简化了动力模型。通过同步轮控制倾转翼的角度完成飞船飞行模式和船型模式的转换,控制更加精准高效,可靠性更强。
24.(3)本发明采用四旋翼结构,四旋翼结构稳定性强且能提供充足动力。飞行模式时,四旋翼结构抗风性能良好,能实现空中稳定快速移动;船型模式时,可利用航行器头部两个电机提供向上升力,防止航行器头部向下倾斜且能减少航行器与水的接触面积,减少水阻,航行器尾部两个电机提供主推力,实现水面快速航行,且能够通过改变尾部两侧电机的转速差,完成航行器的转向。
25.(4)本发明采用独特的飞行姿态和控制方法,在从水面起飞时,前部固定桨先将飞船拉起,后部倾转翼进一步调整,使倾转翼保持水平,最终使机身调整为一种前高后低的飞行姿态,此种飞行姿态有利于在水面起飞时克服水面张力,同时该飞行姿态减小了机体对螺旋桨风场的遮挡,倾斜的机体在迎风时会产生额外的升力,提高了电池的能量利用率。
26.(5)本发明采用空气动力,利用倾转结构可改变升力分布情况,从而实现飞行模式与船型模式的切换。本发明由空气动力和水流同时提供水上航行动力,大大降低推进航行器水上航行所需的动力,提高航行器的续航能力;采用空气动力,亦能有效避免水面航行过程中水下水草缠绕情况。
27.(6)本发明结构多采用碳纤维等环保材料,重量轻,重复利用率高;能使航行器机械结构更轻盈稳定,提高航行器续航能力。
28.(7)本发明应用场景广阔,尤其是在进行跨塘作业时更具优势,例如跨塘投饵、水质检测等。
附图说明
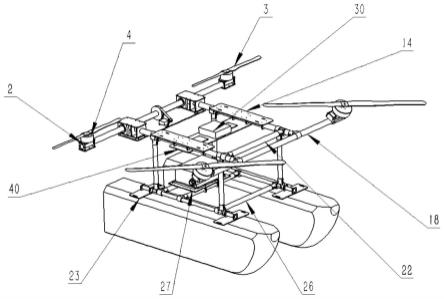
29.图1为水空两栖航行器总体设计图(45
°
斜视图);
30.图2为水空两栖航行器总体设计图(右视图);
31.图3为倾转结构设计图。
32.图中:1、倾转连接杆;2、电机夹板;3、22寸桨叶;4、低扭矩电机;5、倾转轴承;6、轴承夹;7、倾转夹板;8、从同步轮;9、同步带;10、舵机;11、主同步轮;12、固定角件;13、铝柱;14、控制仓板;15、管夹;16、30寸桨叶;17、高扭矩电机;18、固定连接杆;19、三通;20、主板连接杆;21、脚架竖杆;22、前侧主板支撑杆;23、浮筒固定板;24、脚架三通;25、浮筒连接杆;26、电池底杆;27、电池固定板;28、滑槽;29、电池仓;30、主控仓;31、浮筒;32、主板;33、舵机固定板。
具体实施方式
33.下面结合附图共和实例对本发明作更进一步的说明。
34.如图1和图2所示,一种基于同步带的水空两栖矢量多旋翼航行器总体设计图,航行器由其上层结构与下层结构组成,航行器的主板(32)、控制仓板(14)通过管夹(15)与主板连接杆(20)固定,主控仓(30)固定在主板(32)上,仓内集成航行器的主控系统。前侧主板支撑杆(22)两端通过三通(19)连接主板连接杆(20),起结构支撑作用,主板连接杆(20)通过三通(19)在前侧垂直连接固定连接杆(18),在后侧通过倾转机构垂直连接倾转连接杆(1),在固定连接杆(18)和倾转连接杆(1)的两端分别固定低扭矩电机(4)和高扭矩电机(17),其中低扭矩电机通过电机夹板(2)和管夹(15)固定在倾转连接杆(1)上,通过安装孔固定22寸桨叶(3);高扭矩电机(17)与机身水平面固定30
°
夹角,通过安装孔固定30寸桨叶(16)。
35.所述的航行器下层结构利用三通(19)与上层结构相连接,即与主板连接杆(32)连接,三通(19)与脚架竖杆(21)上端垂直连接,四根脚架竖杆(21)连接完成后整体形成一种矩形框的结构,在脚架竖杆(21)下端通过三通(19)垂直固定浮筒连接杆(25),在两浮筒连接杆(25)之间固定电池底杆(26),以增加结构稳定性,浮筒连接杆(25)通过管夹(15)与浮筒固定板(23)相连,浮筒(31)通过浮筒固定板(23)固定在航行器下层结构上,在电池底杆(26)上利用管夹(15)固定电池底板(27)安装电池仓(29),电池底板(27)与电池仓(29)之间使用滑槽(28)固定,电池仓(29)固定在靠近倾转连接杆(1)的位置上,能使整个机身重心靠后,有利于后续控制。
36.如图3所示,水空两栖航行器的倾转结构,舵机固定板(33)通过铝柱(13)垫高后与倾转夹板(7)连接,在上下倾转夹板(7)之间固定管夹(15)和轴承夹(6),管夹(15)将倾转结构与主板连接杆(20)相互固定,轴承夹(15)固定倾转轴承(5),倾转轴承(5)中穿过倾转连接杆(1),最终使主板连接杆(20)与倾转连接杆(1)垂直。在舵机固定板(33)中部通过固定角件(12)将舵机(10)固定,在舵机(10)旋转轴顶端固定主同步轮(11),主同步轮(11)通过同步带(9)带动从同步轮(8),从同步轮(8)固定在倾转连接杆(1)中部,当舵机(10)转动时,
从同步轮(8)带动倾转连接杆(1)转动,从而实现低扭矩电机(4)相对机身位置的旋转,改变主升动力的矢量方向。
37.本发明方法的技术方案为:一种基于同步带的水空两栖矢量多旋翼航行器的控制方法,包括以下几个步骤:
38.步骤1,将电池仓(29)上的电源总开关打开,使得低扭矩电机(4)和高扭矩电机(17)与主控仓30)分别上电,通过蜂鸣器的声音提示确定主控仓(30)初始化是否成功;
39.步骤2,主控仓(30)输出pwm波,给电调一个最低油门和最高油门进行校准,随后退出电调校准任务;
40.步骤3,遥控器解锁,对应通道切换为飞行模式,舵机(10)输出轴旋转,使低扭矩电机(4)与地面保持水平;
41.步骤4,拉高遥控器油门,高扭矩电机(17)先带动航行器前端抬起,机身总体呈前端翘起,机身水平面与地面夹角逐渐增大,同时舵机(10)输出轴旋转,使低扭矩电机(4)螺旋桨水平面与地面保持水平,通过主控仓(30)上的imu姿态估计模块对航行器姿态进行解算,微处理器对解算出的姿态数据以及遥控器传入的数据进行分析处理,生成期望,通过pid调节舵机(10)倾角和前后两电机转速,控制航行器完成前进、悬停等动作;
42.步骤5,航行器飞行到水域上,拉低遥控器油门,通过毫米波雷达数据进行高度控制,将航行器降低到水面上,随后高扭矩电机(17)减速,使船身水平面与水面的夹角逐渐减小直至水平,同时舵机(10)输出轴旋转,使低扭矩电机(4)与地面保持水平,着陆水面后,切换遥控器对应通道为船型模式,舵机(10)输出轴旋转,使低扭矩电机(4)与水面保持垂直;
43.步骤6,拉高遥控器油门,航行器开始航行,通过主控仓(30)上的imu姿态估计模块对航行器姿态进行解算,微处理器对解算出的姿态数据以及遥控器传入的数据进行分析处理,生成期望,通过pid调节舵机(10)倾角和低扭矩电机(4)转速,控制航行器完成前进、转弯等动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1