跟车制动拖滞补偿方法及模块与流程
本发明涉及汽车领域,特别是涉及一种智能驾驶或高级辅助驾驶中使用的跟车制动拖滞补偿方法及模块。
背景技术:
1、近年来adas系统装车量快速增长,其中跟车巡航功能根据自车与前车的距离和速度等条件,计算出控制加减速度,通过制动和驱动控制始终保持与前车的安全距离,一定程度上缓解了驾驶员的疲劳。然而,由于制动传动零部件锈蚀,制动系统排气不畅等原因造成制动系统拖滞,严重影响了车辆制动控制的准确性。因此,克服车辆制动拖滞影响一直是车辆控制领域中重要的研究课题。
2、中国专利cn202210432303.5公开了一种低拖滞制动系统装置及其控制方法,装置包括制动卡钳活塞、密封槽及密封圈,密封圈设置于密封槽内,制动卡钳活塞通过密封圈的回弹力进行回位;密封槽包括密封槽本体、密封槽前底边及密封槽后底边,所述密封槽前底板与密封槽本体之间设置有密封槽前倒角部,密封槽后底板与密封槽本体之间设置有密封槽后倒角部;密封槽前倒角部包括斜边部和弧形部,斜边部的上边连接密封槽本体,斜边部的下边与弧形部的上边连接,弧形部的下边与密封槽前底边连接。其通过机械结构降低制动系统拖滞力矩,从而延长制动系统使用寿命,降低整车功耗,提高电动车续驶里程。但是随着使用时间的增长还是不可避免的出现由于制动传动零部件锈蚀,制动系统排气不畅等原因造成制动系统拖滞的问题。
3、中国专利cn202020480925.1公开了一种可提高操作舒适度的整车制动系统,包括整车制动系统本体,所述整车制动系统本体的顶端固定连接有油门搭脚槽,所述整车制动系统本体的顶端固定连接有制动搭脚槽,所述油门搭脚槽的正面装设有油门推动杆,且油门推动杆的顶端固定连接有油门踏板,所述制动滑动件的顶端装设有第二制动主缸,且第二制动主缸的内部插设有第二制动伸缩杆,所述第二制动主缸的表面装设有第二制动复位弹簧。本实用新型设置有制动推动杆和制动滑动件,通过该方式能够有效地提高整车的动力,通过将人机工程学实践到油门踏板和制动踏板的设计当中,通过该方式能够有效地减少因驾车的舒适性不足而出现的驾驶失误。此方案也是通过机械结构该上拖滞提高舒适性,也没能解决随着使用时间的增长还是不可避免的出现由于制动传动零部件锈蚀,制动系统排气不畅等原因造成制动系统拖滞的问题。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,该简化形式的概念均为本领域现有技术简化,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、本发明要解决的技术问题是提供一种能不受使用时长影响,避免机械结构老化造成制动系统拖滞的跟车制动拖滞补偿方法及模块
3、为解决上述技术问题,本发明提供的跟车制动拖滞补偿方法,包括以下步骤:
4、a,获取自车轮速、自车减速度请求以及自车与目标车距离,根据自车轮速计算自车车速和自车减速度;
5、b,当制动控制过程中减速度请求与自车减速度的差值,或者扭矩请求与自车实际扭矩的差值,或者自车车速与目标车速的差值大于等于标定门槛值触发拖滞补偿;
6、c,计算拖滞程度、拖滞增益和拖滞补偿;
7、d,对拖滞补偿进行优化处理去除指定范围外的拖滞补偿值;
8、e,将优化后的拖滞补偿值的积分加入到减速度请求积分,获得修正后的减速度请求。
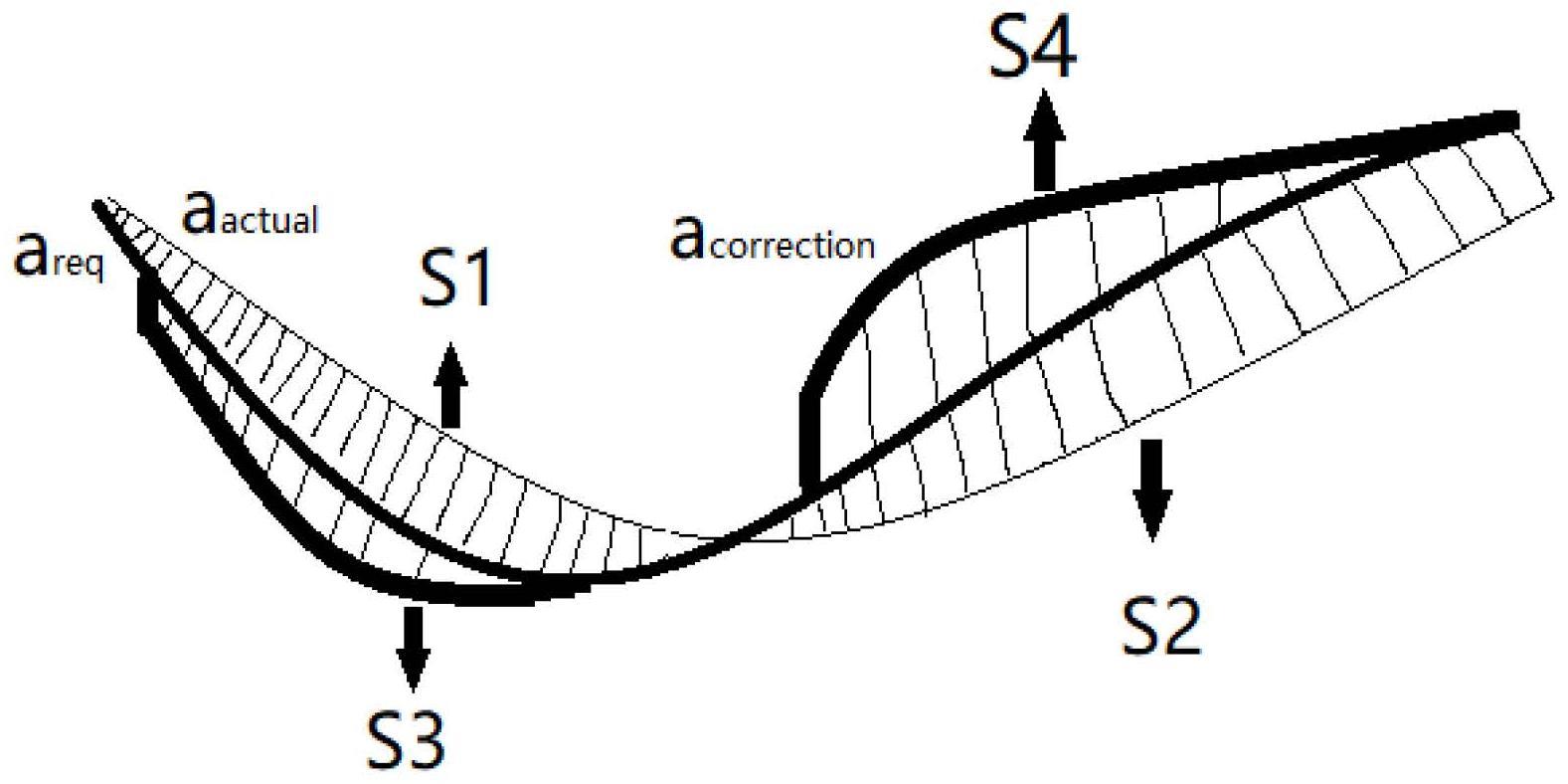
9、其中,拖滞程度采用areq-aactual表征,aactual是实际减速度,areq是减速度请求。
10、其中,拖滞增益根据车速v及跟车距离s标定获得。
11、可选择的,所述的跟车制动拖滞补偿方法,优化处理包括:
12、对计算的拖滞补偿值进行限制值,防止补偿值阶跃上升造成顿挫感;
13、对限制值后拖滞补偿值进行限幅限制和一阶过滤处理,防止计算的补偿值抖动造成顿挫感;
14、在拖滞补偿退出时,标定斜率退出,防止补偿值阶跃下降造成顿挫感;
15、为解决上述技术问题,本发明提供的跟车制动拖滞补偿模块,包括:
16、输入单元,其自车载总线接收自车轮速、自车减速度请求、以及自车与目标车距离,其通过自车轮速计算自车车速和自车减速度;
17、拖滞识别单元,当制动控制过程中减速度请求与自车减速度的差值,或者扭矩请求与自车实际扭矩的差值,或者自车车速与目标车速的差值大于等于标定门槛值触发拖滞补偿控制;
18、拖滞补偿计算单元,其用于计算拖滞程度、拖滞增益和拖滞补偿;
19、控制滤波处理单元,其对拖滞补偿进行优化处理去除指定范围外的拖滞补偿值,将优化后的拖滞补偿值加入减速度请求获得修正后的减速度;
20、将优化后的拖滞补偿值的积分加入减速度请求和实际减速度差值积分。
21、其中,拖滞程度采用areq-aactual表征,aactual是实际减速度,areq是减速度请求。
22、其中,拖滞增益根据车速v及跟车距离s标定获得。
23、可选择的,进一步改进所述的跟车制动拖滞补偿模块,优化处理包括:
24、对计算的拖滞补偿值进行限制值,防止补偿值阶跃上升造成顿挫感;
25、对限制值后拖滞补偿值进行限幅限制和一阶过滤处理,防止计算的补偿值抖动造成顿挫感;
26、在拖滞补偿退出时,标定斜率退出,防止补偿值阶跃下降造成顿挫感。
27、本发明的主要设计思路在于通过实时的自车减速度请求、自车与目标车距离、自车计算自车车速和自车减速度计算获得拖滞程度、拖滞增益和拖滞补偿,通过对拖滞补偿进行优化处理使实际减速度达到期望值(该期望值可以是标定或外部获取)。通过实时参数进行拖滞补偿计算避免了不可控的机械机构老化的影响。解决了在制动控制过程中制动拖滞大导致的加压请求时制动力小,减压请求时制动恢复慢等问题,利用计算的拖滞对减速度请求进行补偿,通过跟车巡航测试标定验证后,效果明显。本发明提升了自适应巡航跟停功能的鲁棒性,降低了车辆开发的成本,快速解决实际工程问题,对改善车辆制动控制具有实际意义。
技术特征:
1.一种跟车制动拖滞补偿方法,其特征在于,包括以下步骤:
2.如权利要求1所述的跟车制动拖滞补偿方法,其特征在于:
3.如权利要求1所述的跟车制动拖滞补偿方法,其特征在于:拖滞增益根据车速v及跟车距离s标定获得。
4.如权利要求1所述的跟车制动拖滞补偿方法,其特征在于,优化处理包括:
5.一种跟车制动拖滞补偿模块,其特征在于,包括:
6.如权利要求5所述的跟车制动拖滞补偿模块,其特征在于:
7.如权利要求1所述的跟车制动拖滞补偿模块,其特征在于:拖滞增益根据车速v及跟车距离s标定获得。
8.如权利要求1所述的跟车制动拖滞补偿模块,其特征在于,优化处理包括:
技术总结
本发明公开了一种跟车制动拖滞补偿方法,包括:获取自车轮速、自车减速度请求以及自车与目标车距离,计算自车车速和自车减速度;当制动控制过程中减速度请求与自车减速度的差值大于等于标定门槛值触发拖滞补偿;计算拖滞程度、拖滞增益和拖滞补偿;对拖滞补偿进行优化处理去除指定范围外的拖滞补偿值,将优化后的拖滞补偿值的积分加入到减速度请求的积分获得修正后的减速度请求。本发明提升了自适应巡航跟停功能的鲁棒性,降低了车辆开发的成本,快速解决实际工程问题,对改善车辆制动控制具有实际意义。
技术研发人员:后世昌,何一超,李昊,田贺,芦畅
受保护的技术使用者:联创汽车电子有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!