一种基于功能安全的制动系统S和C评级装置及方法与流程
本发明属于汽车安全领域,尤其是涉及一种基于功能安全的制动系统s和c评级装置及方法。
背景技术:
1、随着智能网联汽车和自动驾驶汽车的快速发展,设计高可靠性和安全性的汽车电控系统日益受到各方关注,其中功能安全在制动系统设计中是必不可缺的一部分。功能安全概念阶段开发是评定asil等级的重要环节,为了得到合理的asil等级,严重度等级和可控性等级评定的正确性至关重要。通过大量的驾驶场景分析能够保证数据的可靠性,但是驾驶场景是无限的,可能造成的危害事件是无限的,对于严重度等级和可控性等级的评定耗时较长。
技术实现思路
1、有鉴于此,本发明旨在提出一种基于功能安全的制动系统s和c评级装置及方法,为实现严重度等级和可控性等级的自动评定,提高功能安全概念阶段开发效率和可靠性,本发明通过场景参数的设定得到功能安全测试场景数据,采用数学模型的判断自动生成严重度等级和可控性等级,得到严重度和可控性分析表,经过全面的分析得到完备的测试场景数据库、严重度等级和可控性等级评定值。本发明提高了功能安全开发效率,为制动系统asil等级评定提供了参考依据,还为整车层级功能安全测试提供了测试场景数据的支持。
2、为达到上述目的,本发明的技术方案是这样实现的:
3、一种基于功能安全的制动系统s和c评级装置及方法,包括下述步骤中的至少一种:
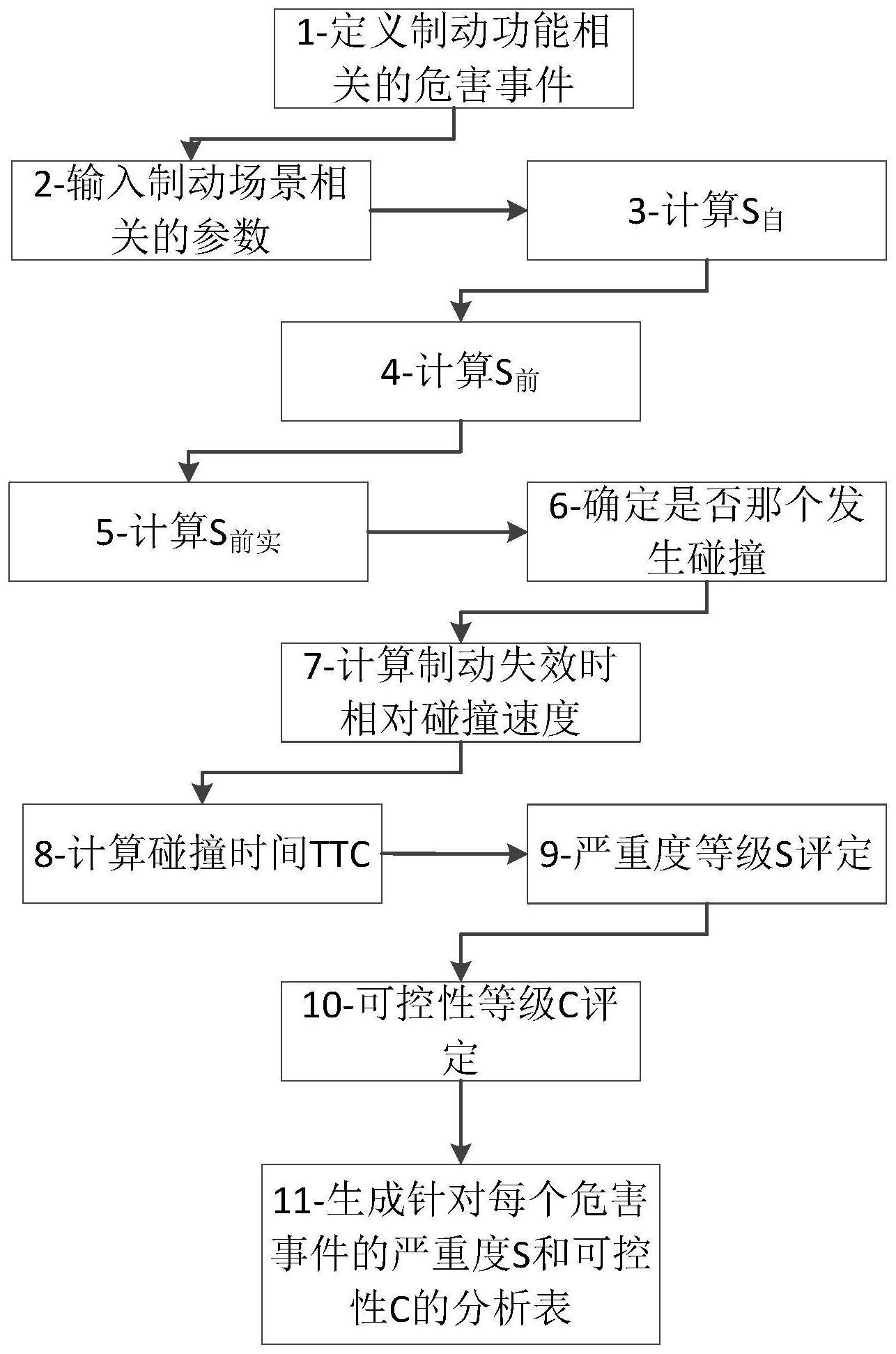
4、s1、定义危害事件,所述危害事件指汽车电子系统在驾驶场景中功能失效后非预期的表现导致对人员造成的伤害;
5、s2、输入场景参数,所述场景参数指驾驶场景中交通参与者的动态行为设置为相应的数值;
6、s3、计算s自,所述s自指在驾驶场景下,制动系统发生失效后的ftti时间内自车实际行驶距离;
7、s4、计算s前,所述s前指在驾驶场景下,制动系统发生失效后前车所走距离与两车初始时刻的相对距离之和;
8、s5、计算s前实,所述s前实是指在驾驶场景下,制动系统发生失效后的ftti时间内前车实际行驶距离;
9、s6、根据步骤s3、步骤s4和步骤s5,确定是否能够发生碰撞;
10、s7、计算相对碰撞速度δv,所述相对碰撞速度δv指在驾驶场景下,制动系统发生失效造成车辆发生碰撞时的相对碰撞速度;
11、s8、计算碰撞时间ttc,所述碰撞时间ttc指在驾驶场景中自车制动系统功能失效后与前车发生碰撞的时间;
12、s9、根据步骤s1至步骤s8对严重度等级评定,所述严重度等级s指对可能发生在潜在危害事件中的一个或多个人员的伤害程度的预估;
13、s10、根据步骤s1至步骤s8对可控性等级评定,所述可控性等级c通过所涉及人员的及时反应避免特定的伤害或者损伤的能力;
14、s11、生成针对每个危害事件的严重度和可控性分析表;
15、s12、根据步骤s1至s11生成针对制动系统的危害事件的严重度和可控性分析表。
16、进一步的,在步骤s2中,涉及到公式如下:
17、vt=v0+at;
18、s=v0t+at2/2;
19、vt2-v02=2as;
20、制动系统的场景参数包括前车初始车速v前、a前、v自、a自1、a自2、δs、v前末、v自末、δv、t1、t2、s1、s反、s动、s前刹停、s前实、s前、s自、ftti;
21、场景参数根据驾驶场景中的驾驶员动作、车辆状态、行驶区域和道路状态进行设定;
22、其中,
23、v前为前车初始在本车道行驶的车速;
24、a前为前车下一时刻的加速度;
25、v自为自车初始车速;
26、a自1为制动系统失效后驾驶员反应过程中的加速度;
27、a自2为制动系统失效后驾驶员动作过程中的加速度;
28、δs为两车初始时刻的相对距离;
29、v前末为前车末速度;
30、v自末为自车末速度;
31、δv为两车碰撞后的相对速度;
32、t1为驾驶员反应时间;
33、t2为驾驶员动作时间;
34、s1为前车行驶距离;
35、s反为驾驶员反应时间内自车行驶距离;
36、s动为驾驶员动作时间内自车行驶距离;
37、s前刹停为前车从初始到刹停的距离;
38、s前实为s前刹停与δs之和;
39、s前为s1与δs之和;
40、s自为自车在ftti时间内的实际距离;
41、ftti为t1与t2之和。
42、进一步的,在步骤s3中,根据步骤s2设定的场景参数v自、a自1、a自2、t1和t2,通过以下数学模型计算得到s自:
43、s自=v自*t1+0.5a自1t12+(v自+a自*t1)*t2+0.5a自2t22。
44、进一步的,在步骤s5中,根据步骤s2设定的场景参数v前、v前末、a前和δs,通过以下数学模型计算得到s前实:
45、s前实=0.5(v前+v前末)*(v前末-v前)/a前+δs。
46、进一步的,具体判定如下:
47、在步骤s6中,根据驾驶员行驶状态和道路情况,给驾驶员反应时间t1赋定值,然后通过给变量t2赋值,根据公式分别计算s自、s前和s前实三个值,并且进行观察;
48、当始终v前末>0,则比较s自和s前,如果始终s自<s前则不能发生碰撞;如果某一时刻t2,s自=s前且下一时刻s自>s前,则两车能够在s自=s前这一时刻发生碰撞;
49、当出现v前末<0,则比较s自和s前实,如果始终s自<s前实则不能发生碰撞;如果某一时刻t2,s自=s前实且下一时刻s自>s前实,则两车能够在s自=s前实这一时刻发生碰撞。
50、进一步的,在步骤s7中,根据步骤s2设定的场景参数v自、v前、a自1、a自2、a前、t1和t2,通过以下数学模型计算得到车辆发生碰撞时的相对碰撞速度δv:
51、δv=v自+a自1t1+a自2t2-v前-a前*(t1+t2)。
52、进一步的,在步骤s8中,根据步骤s2设定的场景参数t1和t2,通过数学模型计算得到碰撞时间ttc。
53、进一步的,在步骤s9中,严重度等级分为4个等级,分别为s0、s1、s2和s3,通过步骤7计算得到的相对碰撞速度δv对s进行评级,当δv≥40时,严重度等级评定为s3;当20≤δv<40时,严重度等级评定为s2;当5≤δv<20时,严重度等级评定为s1;当δv<5时,严重度等级评定为s0。
54、进一步的,在步骤s10中,可控性等级分为4个等级,分别为c0、c1、c2和c3,通过步骤8计算得到的碰撞时间ttc对c进行评级,当ttc>5时,可控性等级评定为c0;当4<ttc≤5时,可控性等级评定为c1;当3<ttc≤4时,可控性等级评定为c2;当ttc≤3时,严重度等级评定为c3。
55、进一步的,在步骤s12中,制动系统中包含多个功能,每个功能对应多个失效模式:
56、首先,针对每个失效模式与驾驶场景的组合定义危害事件
57、然后,设置场景参数,确定场景参数后通过数学模型可自动生成δv、严重度s、ttc和可控制c;
58、最后,将危害事件对应的δv、严重性等级s、ttc和可控性等级c汇总形成制动系统严重度和可控性分析表。
59、相对于现有技术,本发明所述的一种基于功能安全的制动系统s和c评级装置及方法具有以下有益效果:
60、(1)本发明所述的一种基于功能安全的制动系统s和c评级装置及方法,提高功能安全概念阶段开发和整车层级测试的效率,基于功能安全开发的理念,实现了制动系统功能安全严重度等级和可控性等级的自动评定,为asil等级评定提供了参考依据,并建立了功能安全测试场景数据库,为功能安全整车层级测试提供了测试数据;
61、(2)本发明所述的一种基于功能安全的制动系统s和c评级装置及方法,基于功能安全概念阶段开发和整车层级测试的要求,提出了一种基于功能安全的制动系统s和c评级装置及方法。通过场景参数的设定得到功能安全测试场景数据,采用数学模型的判断自动生成严重度等级和可控性等级,得到严重度和可控性分析表,经过全面的分析得到完备的测试场景数据库和s/c等级评定值。本发明为制动系统的汽车安全完整性等级(asil等级)评定提供了参考依据,还为整车层级功能安全测试提供了测试场景数据的支持。
- 还没有人留言评论。精彩留言会获得点赞!