一种自动驾驶站点播报提示系统及方法与流程
1.本发明属于自动驾驶领域,具体涉及一种自动驾驶站点播报提示系统及方法。
背景技术:
2.随着汽车智能化的高速发展,自动驾驶在实际公开道路的应用越为广泛,但是在用户实际乘车,进出站过程中,由于受到站点及周边环境障碍物的影响,无人驾驶系统难以做到正常准确的进出站,并对乘客进行播报提示。
3.所以在自动驾驶无人车系统,产品化的实际道路应用过程中,需要自动驾驶车辆进出站点时能够对乘客做到准确的播报提示,由于现有的自动驾驶站点播报提示系统,当站点被障碍物占据,车辆无法达到地图预先设定好的站点位置时,车辆就无法判断自身是否到站,就会导致自动驾驶播报提示系统异常,无法对乘客进行提示到达站点上下车,只能依靠安全员通过人工手动打开车门,人工提示乘客到站,造成自动驾驶播报提示系统失效的风险。
技术实现要素:
4.本发明提供一种自动驾驶站点播报提示系统,目的是解决现有技术中当站点被障碍物占据,车辆无法到达指定停车位置时,就无法对乘客进行到站播报提示交互的问题。同时,也用来解决单纯依靠地图固定站点进行播报提示,无法实时保证自动驾驶播报系统在任何环境条件下都能有效的进行工作的问题。
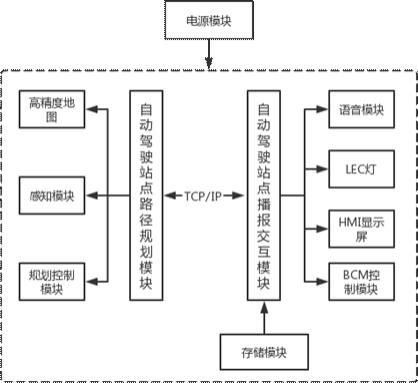
5.本发明采用的技术方案如下:一种自动驾驶站点播报提示系统,包括自动驾驶站点播报交互设备,其特征是所述系统还包括通过tcp/ip的方式与自动驾驶站点播报交互设备进行连接的规划控制模块,所述规划控制模块包括:高精度地图模块、规划控制模块、感知模块,所述规划控制模块调用感知模块中的高精度地图信息。
6.作为优选,所述自动驾驶站点播报交互设备包括:存储模块、语音模块、led灯、hmi显示屏、所述语音模块、led灯、hmi显示屏通过can总线与bcm控制模块连接,所述存储模块中还存储有站点信息,站点语音信息,所述存储模块与hmi显示屏、语音模块电路连接。
7.作为优选,所述感知模块包括声波雷达、激光雷达、摄像头中的一种和多种组合。
8.作为优选,所述存储模块中还存储有站点信息,站点语音信息。
9.本发明还提供一种自动驾驶站点播报提示方法,包括:步骤1、所述规划控制模块从高精度地图中获取站点的位置,并控制车辆往站点行驶;步骤2、当车辆离下一站点距离5米时,所述感知模块进行障碍物判断,检测站点5米范围内是否存在障碍物;步骤3、若所述感知模块检测到站点5米范围内存在障碍物,则所述感知模块继续检测站点后方15米范围内是否存在障碍物;
步骤4、若站点后方15米范围内未检测到障碍物,则车辆提前进行进站操作;步骤5、若站点后方15米范围内同样被障碍物占据时,则所述规划控制模块采取避障绕行策略,重新规划行驶路线,所述感知模块持续进行检测,进入障碍物聚类框后方5米时,进行避障骑线行驶至站点位置且与障碍物具备30厘米的平行安全距离稳定停车15秒,进行进站操作。
10.作为优选,在所述步骤2中,所述感知模块检测到站点5米范围内不存在障碍物时,则进行进站操作。
11.作为优选,在所述步骤4中,车辆以5km/h速度行驶,与障碍物距离2米时停车,进行进站操作。
12.作为优选,在所述步骤4-5中,所述进站操作为:步骤41、判断到达站点时,所述规划控制模块首先发送车门开启信号给bcm控制模块开启车门;步骤42、车门开启同时bcm控制模块读取所述存储模块中的站点信息与站点语音信息,并将上述信息发送到自动驾驶站点播报交互设备;步骤43、所述语音模块根据当前的站点信息进行到达站点及下一站点的语音播报,自动驾驶站点播报交互设备根据设置好的站点id和路线id进行车内外当前到达站点的提示,通过语音播报与屏幕显示的方式与乘客进行交互提示。
13.本发明带来的有益效果:1.本发明利用自动驾驶传站点播报提示系统,解决了实际自动驾驶过程中站点被障碍物阻挡车辆无法进行站点进入播报提示等缺陷,通过进行站点地图、感知、规划系统的联动进行条件判断,保证了车辆进站与乘客交互的方案;2.本发明通过自动驾驶站点播报提示系统,降低了人工接管的接管率,同时保证了复杂场景条件下,车辆能够做到进出站点的提示交互 ,保障了车辆的智能出行。
附图说明
14.图1为本发明系统的结构图。
15.图2-4为本发明方法的流程图。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.如图1所示,本实施例提供一种自动驾驶站点播报提示系统,包括自动驾驶站点播报交互设备,其特征是所述系统还包括通过tcp/ip的方式与自动驾驶站点播报交互设备进行连接的规划控制模块,所述规划控制模块包括:高精度地图模块、规划控制模块、感知模块,所述规划控制模块调用感知模块中的高精度地图信息。
18.所述自动驾驶站点播报交互设备包括:存储模块、语音模块、led灯、hmi显示屏、所述语音模块、led灯、hmi显示屏通过can总线与bcm控制模块连接,所述存储模块中还存储有
站点信息,站点语音信息,所述存储模块与hmi显示屏、语音模块电路连接。
19.进一步地,所述电源模块包括有一系列的 dc-dc 模块,将车载 12vdc 或 24vdc 电压转换为系统中各芯片需要的 12vdc、5vdc、3.3vdc、2.5vdc 电压。
20.进一步地,所述存储模块中存储有站点信息,站点语音信息,所述站点信息包括:站点id、站点位置、站点地图坐标,所述站点语音信息包括:站点名称、上一站站点名称、下一站站点名称。
21.进一步地,所述感知模块包括声波雷达、激光雷达、摄像头中的一种和多种组合,所述超声波雷达数量为6个,均匀分布于车身四周,所述摄像头为红外摄像头,带夜视功能,能在夜晚进行高效工作。
22.如图2-3所示,本实施例还提供一种自动驾驶站点播报提示方法,包括:步骤s1、所述规划控制模块从高精度地图中获取站点的位置,并控制车辆往站点行驶;步骤s2、当车辆离下一站点距离5米时,所述感知模块进行障碍物判断,所述超声波雷达、激光雷达、摄像头检测站点5米范围内是否存在障碍物;步骤s3、若所述感知模块检测到站点5米范围内存在障碍物,则所述感知模块继续检测站点后方15米范围内是否存在障碍物;步骤s4、若站点后方15米范围内未检测到障碍物,则车辆提前进行进站操作;步骤s5、若站点后方15米范围内同样被障碍物占据时,则所述规划控制模块采取避障绕行策略,重新规划行驶路线,所述感知模块持续进行检测,进入障碍物聚类框后方5米时,进行避障骑线行驶至站点位置且与障碍物具备30厘米的平行安全距离稳定停车15秒,进行进站操作。
23.进一步地,在所述步骤s2中,所述感知模块检测到站点5米范围内不存在障碍物时,则进行进站操作。
24.进一步地,在所述步骤s4中,车辆以5km/h速度行驶,与障碍物距离2米时停车,进行进站操作。
25.进一步地,如图4所示,在所述步骤s4-5中,所述进站操作为:步骤s41、判断到达站点时,所述规划控制模块首先发送车门开启信号给bcm控制模块开启车门;步骤s42、车门开启同时bcm控制模块读取所述存储模块中的站点信息与站点语音信息,并将上述信息发送到自动驾驶站点播报交互设备;步骤s43、所述语音模块根据当前的站点信息进行到达站点及下一站点的语音播报,led灯和hmi显示屏,根据设置好的站点id和路线id进行车内外当前到达站点的提示,通过语音播报与屏幕显示的方式与乘客进行交互提示。
26.上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1