照明控制方法、系统、装置、存储介质和计算机程序产品与流程
本技术涉及车辆灯控,特别是涉及一种照明控制方法、系统、装置、存储介质和计算机程序产品。
背景技术:
1、矩阵式前照灯,一般指按照长方阵列排列布置的若干个led灯源。每个led灯源都对应车前的一段照明区域,在控制器的控制下控制各个led灯源的开启、关闭,可以对车前区域进行可变范围的照明。例如,在行驶过程中把局部远光灯关闭,一定程度上可以减少对面会车司机的眩目问题,提高车辆夜间行驶的安全性。
2、全智能矩阵式前照灯的实现是一个需要硬件和软件两方面技术支持的系统性工程。硬件上,需要悬架行程传感器、方向盘转角传感器、光照度传感器、车灯控制模块和高分辨率摄像头等,并且对汽车厂商的制造能力也有很大要求,特别是光源模组和制造精度方面。软件上,需要强大的图像识别处理能力。这些系统的协同工作,才能造就智能化的照明系统,让汽车能够响应于环境变化,提供合适的照明模式。
3、但是由于技术和成本限制,绝大多数的矩阵式前照灯控制精度比较差,导致矩阵式前照灯关闭了错误的led灯源,需要安全照明的区域得不到足够光照,这样会增加夜间行车的安全隐患。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高照明范围控制精度的照明控制方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种照明控制方法,
3、用于包括前照灯的车辆,所述前照灯包括若干独立控制的像素化单元,所述方法包括:
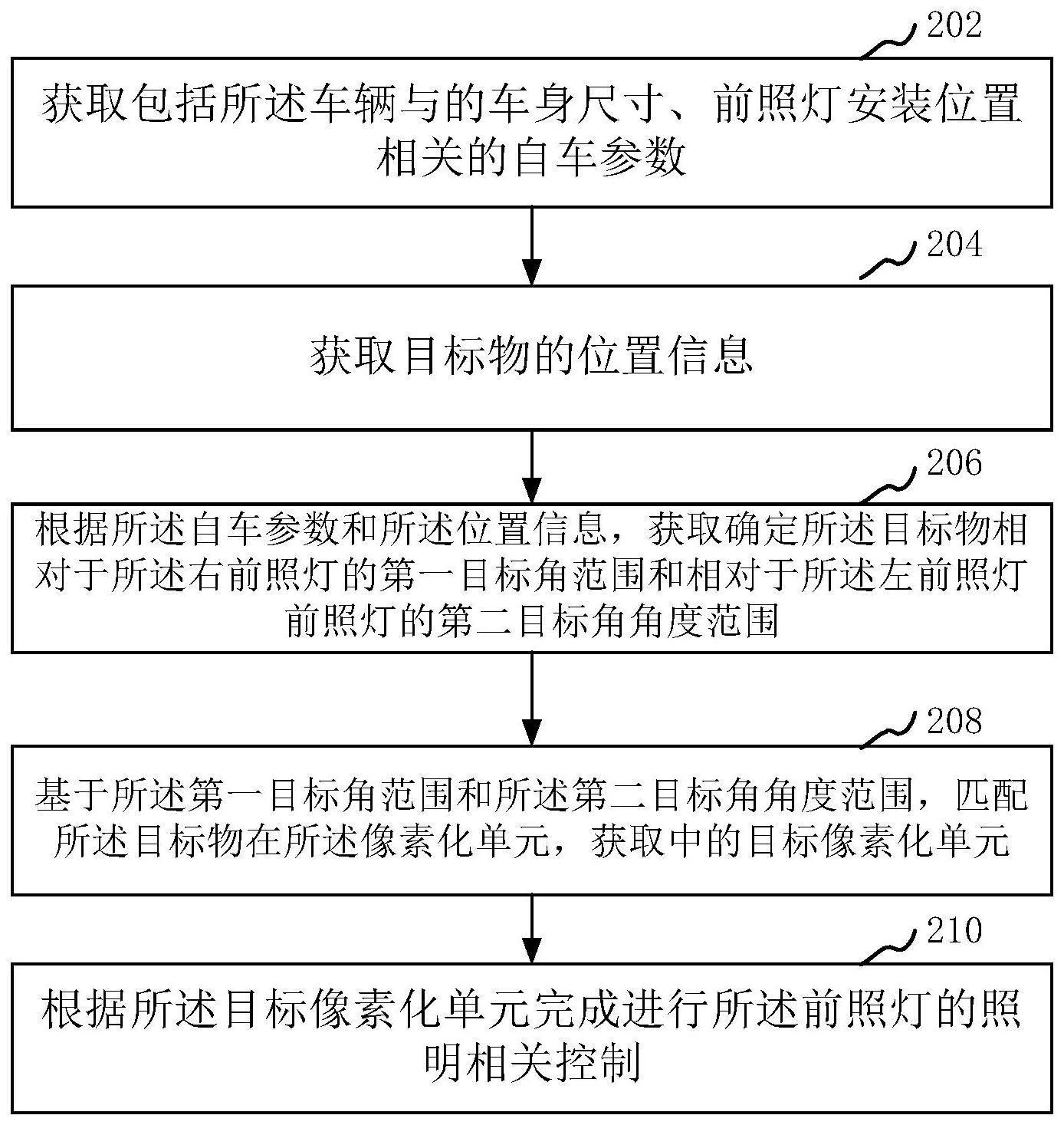
4、获取包括所述车辆的车身尺寸、前照灯安装位置的自车参数;
5、获取目标物的位置信息;
6、根据所述自车参数和所述位置信息,确定所述目标物相对于所述前照灯的角度范围;
7、基于所述角度范围,匹配所述目标物在所述像素化单元中的目标像素化单元;
8、根据所述目标像素化单元进行所述前照灯的照明控制。
9、在其中一个实施例中,在所述车辆包括多个前照灯的情况下,针对不同的前照灯,各自采用独立的软件控制方案实现对相应前照灯的照明控制。
10、在其中一个实施例中,所述根据所述目标像素化单元进行所述前照灯的照明控制,包括:
11、确定所述目标物的类型;
12、根据所述目标物类型执行对应的前照灯照明控制策略。
13、在其中一个实施例中,根据所述目标物类型执行对应的前照灯照明控制策略,包括:
14、在所述目标物的类型为车辆或行人时,所述前照灯照明控制策略包括控制目标像素化单元的打开或关闭;
15、和/或,
16、在所述目标物的类型为指示牌时,所述前照灯照明控制策略包括降调整目标像素化单元的亮度。
17、在其中一个实施例中,在存在多个目标物的情况下,所述匹配所述目标物在所述像素化单元中的目标像素化单元,包括:
18、分别匹配各个目标物在所述前照灯像素化单元中的第一目标像素化单元;
19、计算所述多个目标物的第一目标像素化单元的重合像素化单元;
20、所述根据所述目标像素化单元进行所述前照灯的照明控制包括:
21、对所述重合像素化单元实施目标像素化单元打开或关闭的控制策略,对所述第一目标像素化单元实施调整第一目标像素化单元亮度的控制策略。
22、在其中一个实施例中,所述前照灯包括左前照灯和右前照灯,所述获取包括所述车辆的车身尺寸、前照灯安装位置的自车参数包括:
23、从车辆上获取参考点;参考点包括车辆原点,以及对应于右前照灯的第一中心点和对应于左前照灯的第二中心点;
24、沿车辆的第一轴向,获取第一中心点或第二中心点相对于车辆原点的第一距离;
25、沿车辆的第二轴向,获取第一中心点相对于车辆原点的第二距离;
26、沿车辆的第二轴向,获取第二中心点相对于车辆原点的第三距离;
27、获取第一中心点或第二中心点的离地高度;
28、根据第一距离、第二距离、第三距离和离地高度,确定自车参数。
29、在其中一个实施例中,获取目标物的位置信息包括:
30、采集车辆前方的环境信息;
31、基于环境信息确定目标物的目标边界;
32、从目标边界上选取多个关键点;
33、针对每一个关键点,获取关键点和车辆原点所在直线与车辆的第一轴向之间投影到水平面的夹角,根据投影到水平面的夹角确定横向角;
34、针对每一个关键点,获取关键点和车辆原点所在直线与水平面的夹角,根据与水平面的夹角确定纵向角;
35、沿车辆的第一轴向,获取每一个关键点相对于第一中心点或第二中心点的第四距离;
36、根据横向角、纵向角和第四距离,确定位置信息。
37、在其中一个实施例中,基于自车参数和位置信息,获取目标物相对于右前照灯的第一目标角范围和相对于左前照灯的第二目标角范围包括:
38、根据横向角、第一距离、第四距离和第二距离,确定各个关键点对应的第一目标横向角;第一目标横向角为关键点和第一中心点所在直线与车辆的第一轴向之间投影到水平面的夹角;
39、根据横向角、第一距离、第四距离和第三距离,确定各个关键点对应的第二目标横向角;第二目标横向角为关键点和第二中心点所在直线与车辆的第一轴向之间投影到水平面的夹角;
40、根据纵向角、第一距离、第四距离和离地高度,确定各个关键点对应的目标纵向角;目标纵向角为第一中心点或第二中心点和关键点所在直线与水平面的夹角;
41、根据第一目标横向角、第二目标横向角和目标纵向角,确定第一目标角范围和第二目标角范围。
42、在其中一个实施例中,根据第一目标横向角、第二目标横向角和目标纵向角,确定第一目标角范围和第二目标角范围包括:
43、根据各个关键点对应的目标纵向角,确定相较于第一中心点或第二中心点,覆盖目标物的目标纵向角范围;
44、根据各个关键点对应的第一目标横向角,确定相对于第一中心点,覆盖目标物的第一目标横向角范围,根据第一目标横向角范围和目标纵向角范围,确定第一目标角范围;
45、根据各个关键点对应的第二目标横向角,确定相对于第二中心点,覆盖目标物的第二目标横向角范围,根据第二目标横向角范围和目标纵向角范围,确定第二目标角范围。
46、在其中一个实施例中,在所述前照灯包括左前照灯和右前照灯的情况下,所述根据所述自车参数和所述位置信息,确定所述目标物相对于所述前照灯的角度范围包括:基于所述自车参数和所述位置信息,获取所述目标物相对于所述右前照灯的第一目标角范围和相对于所述左前照灯的第二目标角范围,所述基于所述角度范围,匹配所述目标物在所述像素化单元中的目标像素化单元包括:
47、获取各个像素化单元对应的横向边界角和纵向边界角;
48、对比第一目标角范围与各个像素化单元的横向边界角与纵向边界角,获取覆盖第一目标角范围的第一像素化单元;
49、对比第二目标角范围与各个像素化单元的横向边界角与纵向边界角,获取覆盖第二目标角范围的第二像素化单元;
50、根据第一像素化单元和第二像素化单元,确定目标像素化单元。
51、第二方面,本技术还提供了一种照明控制装置,用于包括前照灯的车辆,所述前照灯包括若干独立控制的像素化单元,该装置包括:
52、第一获取模块,用于获取包括车辆的车身尺寸、前照灯安装位置的自车参数;
53、第二获取模块,用于获取目标物的位置信息;
54、处理模块,用于根据所述自车参数和位置信息,确定所述前照灯的角度范围;
55、匹配模块,用于基于所述角度范围,匹配所述目标物在所述像素化单元中的目标像素化单元;
56、控制模块,用于根据目标像素化单元进行所述前照灯的照明控制。
57、第三方面,本技术还提供了一种计算机设备,该计算机设备包括存储器和处理器,存储器存储有计算机程序,处理器执行所述计算机程序时实现本公开任意一项实施例所述的方法步骤。
58、第四方面,本技术还提供了一种计算机可读存储介质,该计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现本公开任意一项实施例所述的方法步骤。
59、第五方面,本技术还提供了一种计算机程序产品,该计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现本公开任意一项实施例所述的方法步骤。
60、上述照明控制方法、装置、计算机设备、存储介质和计算机程序产品,基于目标物位置信息和车身尺寸相关自车参数,对左前照灯和右前照灯进行独立计算,分别获取第一目标角范围和第二目标角范围,匹配像素化单元,通过控制匹配的像素化单元,实现精准照明和达到防眩目效果。每个像素化单元都可以独立控制打开或关闭,提高了照明范围控制精度。同时,由于本技术能够针对不同车型,以及前照灯安装位置的不同,将自车参数融入到像左前照灯和右前照灯相应目标角范围的计算中,极大地提高了像素化单元的匹配精度,进而实现精准化的控制。
- 还没有人留言评论。精彩留言会获得点赞!