一种车辆主动紧急避撞的控制方法、装置及存储介质与流程
本发明涉及汽车驾驶辅助,尤其是涉及一种车辆主动紧急避撞的控制方法、装置及存储介质。
背景技术:
1、自动驾驶技术为车辆的驾驶提供了便利,其能够在不影响驾驶行程的情况下,保证行车的安全可靠,避免疲劳驾驶。
2、在自动驾驶过程中,如何避免前方障碍物带来的碰撞风险对于车辆的安全、稳定行驶有着重要作用。现如今市场已量产自动驾驶辅助功能,在本车道前方被障碍物占道的场景下,均无法进行紧急避险操作,仍需要驾驶员主动干预,此外,对于车道内行驶的车辆而言,诸如鬼探头的行人或自行车等因素也会引发一系列的车辆安全事故,导致车辆出现碰撞风险,不利于车辆的安全行驶。
技术实现思路
1、本发明提供一种车辆主动紧急避撞的控制方法、装置及存储介质,通过设计车辆在前方有碰撞风险时的最佳避撞与转向策略,最大程度让自动紧急制动与自动紧急避让功能发挥作用,将车辆的碰撞风险降至最低,保证了车辆的安全行驶。
2、为了解决上述技术问题,本发明实施例提供了一种车辆主动紧急避撞的控制方法,包括:
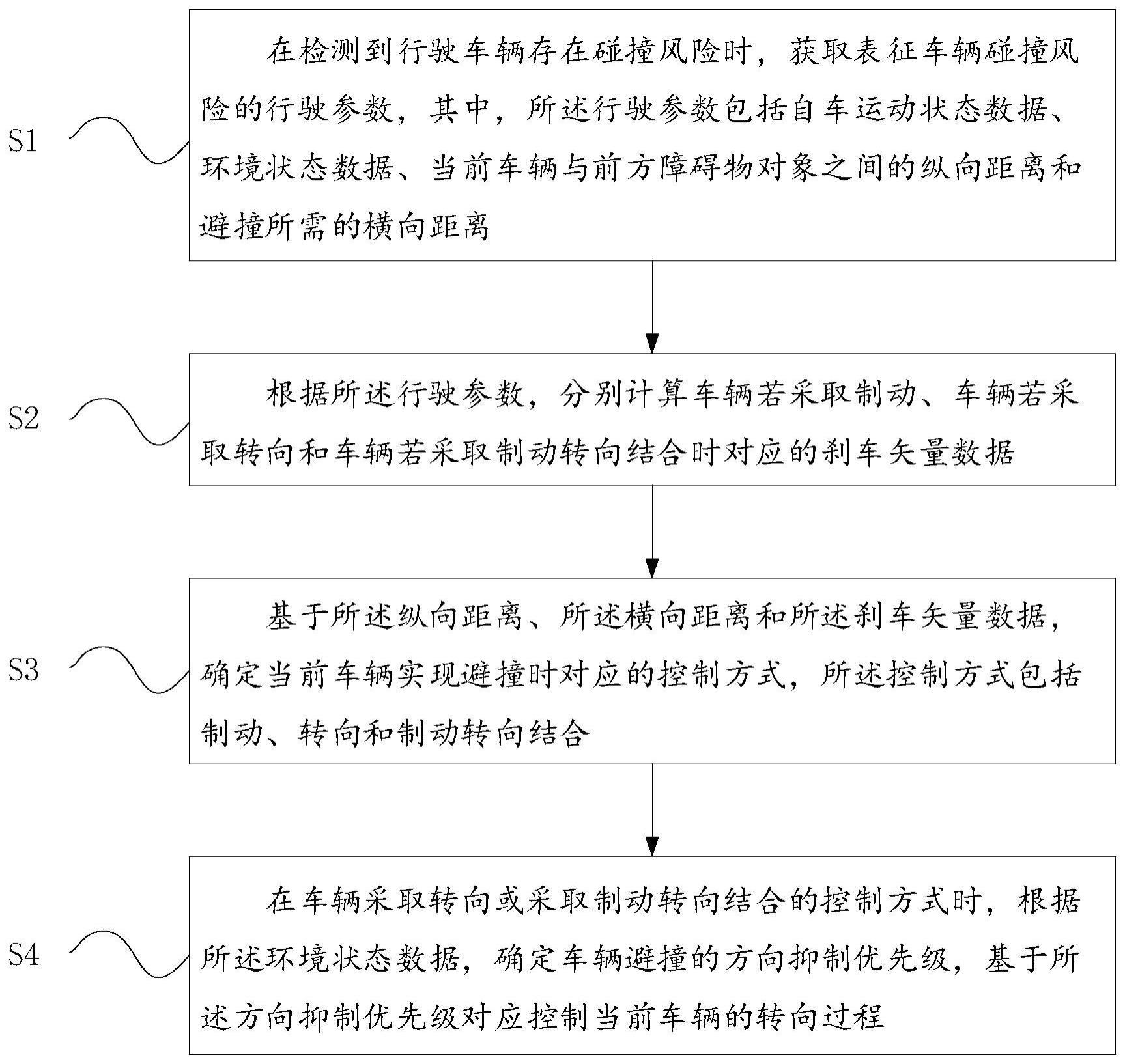
3、在检测到行驶车辆存在碰撞风险时,获取表征车辆碰撞风险的行驶参数,其中,所述行驶参数包括自车运动状态数据、环境状态数据、当前车辆与前方障碍物对象之间的纵向距离和避撞所需的横向距离;
4、根据所述行驶参数,分别计算车辆若采取制动、车辆若采取转向和车辆若采取制动转向结合时对应的刹车矢量数据;
5、基于所述纵向距离、所述横向距离和所述刹车矢量数据,确定当前车辆实现避撞时对应的控制方式,所述控制方式包括制动、转向和制动转向结合;
6、在车辆采取转向或采取制动转向结合的控制方式时,根据所述环境状态数据,确定车辆避撞的方向抑制优先级,基于所述方向抑制优先级对应控制当前车辆的转向过程。
7、作为其中一种优选方案,在检测到行驶车辆存在碰撞风险前,所述方法还包括:
8、根据行驶车辆的自车运动状态数据,确定轨迹预测周期;
9、利用所述自车运动状态数据,确定前方危险区域,其中,所述前方危险区域用于指示一个所述轨迹预测周期内,与行驶车辆可能发生碰撞的障碍物对象需要进入的区域;
10、在检测到所述前方危险区域内出现障碍物对象时,确定行驶车辆存在碰撞风险。
11、作为其中一种优选方案,所述自车运动状态数据包括自车横纵向速度、自车横纵向加速度、转向力矩、方向盘转角/转速,横摆角;
12、所述环境状态数据包括底面摩擦系数和左右车道信息,其中,所述左右车道信息至少包括左右车道路况、左右车道线信息和路沿位置。
13、作为其中一种优选方案,所述刹车矢量数据包括制动距离和转向方向;
14、所述基于所述纵向距离和所述刹车矢量数据,确定当前车辆实现避撞时对应的控制方式,具体包括:
15、若所述纵向距离大于车辆若采取制动时对应的制动距离,则确定当前车辆实现避撞时对应的控制方式为制动;
16、若所述纵向距离小于车辆若采取制动时对应的制动距离,且所述纵向距离大于车辆若采取转向时对应的避撞距离,则确定当前车辆实现避撞时对应的控制方式为转向;
17、若所述纵向距离小于车辆若采取转向时对应的避撞距离,且所述纵向距离大于车辆若采取制动转向结合时对应的制动距离,则确定当前车辆实现避撞时对应的控制方式为制动转向结合;
18、若所述纵向距离小于车辆若采取制动转向结合时对应的制动距离,则确定当前车辆实现避撞时对应的控制方式为制动。
19、作为其中一种优选方案,所述转向方向包括有障碍物一侧的方向、无车道的方向、路沿方向、实线方向、虚线方向和左侧方向;
20、所述方向抑制优先级从高至低依次为:有障碍物一侧的方向、无车道的方向、路沿方向、实线方向、虚线方向、左侧方向。
21、作为其中一种优选方案,在确定当前车辆实现避撞时对应的控制方式为转向或制动转向结合时,控制点亮车辆的转向灯,并向驾驶员生成提醒信息。
22、本发明另一实施例提供了一种车辆主动紧急避撞的控制装置,包括整车控制器,所述整车控制器被配置为:
23、在检测到行驶车辆存在碰撞风险时,获取表征车辆碰撞风险的行驶参数,其中,所述行驶参数包括自车运动状态数据、环境状态数据、当前车辆与前方障碍物对象之间的纵向距离和避撞所需的横向距离;
24、根据所述行驶参数,分别计算车辆若采取制动、车辆若采取转向和车辆若采取制动转向结合时对应的刹车矢量数据;
25、基于所述纵向距离、所述横向距离和所述刹车矢量数据,确定当前车辆实现避撞时对应的控制方式,所述控制方式包括制动、转向和制动转向结合;
26、在车辆采取转向或采取制动转向结合的控制方式时,根据所述环境状态数据,确定车辆避撞的方向抑制优先级,基于所述方向抑制优先级对应控制当前车辆的转向过程。
27、作为其中一种优选方案,所述整车控制器为adas域控制器。
28、本发明再一实施例提供了一种电子设备,包括第一类传感器、第二类传感器、处理器和存储器;
29、所述第一类传感器,用于采集车辆的自车运动状态数据;
30、所述第二类传感器,用于采集车辆的环境状态数据;
31、所述处理器,用于根据所述自车运动状态数据和所述环境状态数据,在检测到行驶车辆存在碰撞风险时,获取当前车辆与前方障碍物对象之间的纵向距离和避撞所需的横向距离;
32、所述存储器上存储可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序处理所述自车运动状态数据和所述环境状态数据时,执行如上所述的车辆主动紧急避撞的控制方法。
33、本发明再一实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其中,所述计算机可读存储介质所在设备执行所述计算机程序时,实现如上所述的车辆主动紧急避撞的控制方法。
34、相比于现有技术,本发明实施例的有益效果在于以下所述中的至少一点:
35、(1)完善车辆自动驾驶过程中,在发现存在碰撞风险后的逻辑控制策略,通过对车辆若采取制动、车辆若采取转向和车辆若采取制动转向结合时对应的刹车矢量数据进行分析,评估得到最佳的控制方式,从而最大程度让自动紧急制动与自动紧急避让功能发挥作用,尽可能将碰撞风险降至最低。
36、(2)在车辆采取转向或采取制动转向结合的控制方式时,对不同的车辆避撞的转向方向进行仲裁分析,抑制高优先级的方向,确定车辆实现避撞时对应的转向方向,对应整变道转向动作,从而使得车辆的主动紧急避撞控制更为全面、更加安全,提升了配备辅助驾驶或自动驾驶系统车辆的安全性。
技术特征:
1.一种车辆主动紧急避撞的控制方法,其特征在于,包括:
2.如权利要求1所述的车辆主动紧急避撞的控制方法,其特征在于,在检测到行驶车辆存在碰撞风险前,所述方法还包括:
3.如权利要求1所述的车辆主动紧急避撞的控制方法,其特征在于,所述自车运动状态数据包括自车横纵向速度、自车横纵向加速度、转向力矩、方向盘转角/转速,横摆角;
4.如权利要求1所述的车辆主动紧急避撞的控制方法,其特征在于,所述刹车矢量数据包括制动距离和转向方向;
5.如权利要求4所述的车辆主动紧急避撞的控制方法,其特征在于,所述转向方向包括有障碍物一侧的方向、无车道的方向、路沿方向、实线方向、虚线方向和左侧方向;
6.如权利要求1所述的车辆主动紧急避撞的控制方法,其特征在于,在确定当前车辆实现避撞时对应的控制方式为转向或制动转向结合时,控制点亮车辆的转向灯,并向驾驶员生成提醒信息。
7.一种车辆主动紧急避撞的控制装置,其特征在于,包括整车控制器,所述整车控制器被配置为:
8.如权利要求7所述的车辆主动紧急避撞的控制装置,其特征在于,所述整车控制器为adas域控制器。
9.一种电子设备,其特征在于,包括第一类传感器、第二类传感器、处理器和存储器;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储
技术总结
本发明公开了一种车辆主动紧急避撞的控制方法、装置及存储介质,其中方法包括获取表征车辆碰撞风险的行驶参数;分别计算车辆若采取制动、车辆若采取转向和车辆若采取制动转向结合时对应的刹车矢量数据;确定当前车辆实现避撞时对应的控制方式,所述控制方式包括制动、转向和制动转向结合;在车辆采取转向或采取制动转向结合的控制方式时,根据方向抑制优先级对应控制当前车辆的转向过程。本发明实施例提供的车辆主动紧急避撞的控制方法、装置及存储介质,通过设计车辆在前方有碰撞风险时的最佳避撞与转向策略,最大程度让自动紧急制动与自动紧急避让功能发挥作用,将车辆的碰撞风险降至最低,提升了配备辅助驾驶或自动驾驶系统车辆的安全性。
技术研发人员:李谦
受保护的技术使用者:华人运通(上海)自动驾驶科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!