自动驾驶汽车油门信号采样控制电路的制作方法
1.本实用新型涉及自动驾驶技术领域,尤其涉及一种自动驾驶汽车油门信号采样控制电路。
背景技术:
2.随着科技的发展进步,汽车也越来越智能化。自动驾驶技术将越来越广泛地走进我们的生活。自动驾驶技术采用传感器来获取路况信息,并结合导航地图来实现地对车辆的行驶控制。
3.在对汽车进行自动驾驶控制时,自动驾驶控制器通过接口与汽车的控制单元进行通信,以通过接口输出油门控制信号至所述汽车的控制单元,以对汽车进行行驶控制,由于汽车内部信号环境相对复杂,通信端口信号的不稳定可能会造成自动驾驶控制器内的芯片的损坏,导致自动驾驶故障问题产生。且现有的自动驾驶车的控制器电路结构复杂,成本高。对于固定路线的低端 (例如工厂货物搬运车)应用来说生产成本太高。
技术实现要素:
4.本实用新型旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本实用新型的一个目的在于提出一种自动驾驶汽车油门信号采样控制电路。
5.为实现上述目的,根据本实用新型实施例的自动驾驶汽车油门信号采样控制电路,包括:
6.控制器;
7.数模转换器u4,所述数模转换器u4的数字信号采集端与所述控制器的油门控制信号输出端连接,以将所述油门控制信号转换为对应的模拟信号输出;
8.第一数模隔离电路,所述第一数模隔离电路与所述数模转换器u4连接,以将第一路模拟信号进行隔离输出;
9.第一继电器切换电路,所述第一继电器切换电路分别与所述控制器、第一数模隔离电路的输出端及汽车接口的第一油门信号控制端连接,以在所述控制器的控制下,将所述第一路模拟信号输出,对汽车进行自动驾驶控制。
10.进一步地,根据本实用新型的一个实施例,所述第一数模隔离电路包括第一运算放大器u5a,所述第一运算放大器u5a的正输入端与所述数模转换器u4的第一模拟信号输出端连接,所述第一运算放电器的负输入端通过第一电阻r15与第一运算放电器的输出端连接,以将所述数模转换器u4输出的第一模拟信号隔离输出。
11.进一步地,根据本实用新型的一个实施例,第一数模隔离电路还包括:第一稳压二极管d1,所述第一稳压二极管d1的阴极与所述第一运算放大器 u5a的输出端连接,所述第一稳压二极管d1的阳极与参考地连接,以将脉冲干扰信号吸收。
12.进一步地,根据本实用新型的一个实施例,所述第一继电器切换电路包括:
13.三极管q4,所述三极管q4的基极通过第二电阻r27与所述控制器的一控制端连接,
所述三极管q4的发射极与参考地连接,所述三极管q4的发射极还通过第三电阻r30与所述三极管q4的基极连接;
14.继电器j1,所述继电器j1的一控制端与所述三极管q4的集电极连接,所述继电器j1另一控制端与供电电源连接,所述继电器j1的公共端与所述汽车接口的油门信号控制端连接,所述继电器j1的第一选择端与所述第一运算放大器u5a的输出端连接。
15.进一步地,根据本实用新型的一个实施例,所述继电器j1的第二选择端与所述汽车接口的油门信号脚板端连接。
16.进一步地,根据本实用新型的一个实施例,所述第一继电器切换电路还包括:
17.二极管d5,所述二极管d5的阳极与所述继电器j1的所述一控制端连接,所述二极管d5的阴极与所述继电器j1的所述另一控制端连接。
18.进一步地,根据本实用新型的一个实施例,所述第一继电器切换电路还包括:
19.发光二极管d8,所述发光二极管d8的阴极与所述三极管q4的集电极连接;
20.第四电阻r23,所述第四电阻r23的一端与所述发光二极管d8的阳极连接,所述发光二极管d8的阴极与供电电源连接。
21.进一步地,根据本实用新型的一个实施例,所述自动驾驶汽车油门信号采样控制电路还包括第一模数隔离电路,所述第一模数隔离电路包括:第二运算放大器,所述第二运算放大器的正输入端与所述汽车接口的油门信号控制端连接,所述第二运算放电器u8a的负输入端与通过第五电阻r37与第一运算放电器的输出端连接,所述第二运算放电器u8a的输出端与所述控制器连接,以对油门信号进行采集。
22.进一步地,根据本实用新型的一个实施例,所述第一模数隔离电路还包括:
23.第六电阻r41,所述第二运算放大器的正输入端通过所述第六电阻r41 与所述汽车接口的油门信号控制端连接;其中,说第六电阻r41的一端与所述第二运算放大器的正输入端连接,所述第六电阻r41的另一端与所述汽车接口的油门信号控制端连接;
24.第二稳压二极管d15,所述第二稳压二极管d15的阳极与所述第六电阻 r41的所述另一端连接,所述第二稳压二极管d15的阴极与参考地连接;
25.电容c13,所述电容c13的一端与所述第六电阻r41的所述一端连接,所述电容c13的另一端与参考地连接。
26.所述自动驾驶汽车油门信号采样控制电路还包括:
27.第二数模隔离电路,所述第二数模隔离电路与所述数模转换器连接,以将所述模拟信号进行隔离输出;
28.第二继电器切换电路,所述第二继电器切换电路分别与所述控制器、第二数模隔离电路的输出端及汽车接口的第二油门信号控制端连接,以在所述控制器的控制下,将第二路模拟信号输出,对汽车进行自动驾驶控制;
29.第三数模隔离电路,所述第三数模隔离电路与所述数模转换器连接,以将所述模拟信号进行隔离输出;
30.第三继电器切换电路,所述第三继电器切换电路分别与所述控制器、第三数模隔离电路的输出端及汽车接口的第三油门信号控制端连接,以在所述控制器的控制下,将第三路模拟信号输出,对汽车进行自动驾驶控制;
31.第四数模隔离电路,所述第四数模隔离电路与所述数模转换器连接,以将所述模
拟信号进行隔离输出;
32.第四继电器切换电路,所述第四继电器切换电路分别与所述控制器、第四数模隔离电路的输出端及汽车接口的第四油门信号控制端连接,以在所述控制器的控制下,将第四路模拟信号输出,对汽车进行自动驾驶控制。
33.本实用新型实施例提供的自动驾驶汽车油门信号采样控制电路,通过数模转换器u4的数字信号采集端将所述油门控制信号转换为对应的模拟信号输出;第一数模隔离电路将第一路模拟信号进行隔离输出;第一继电器切换电路在所述控制器的控制下,将所述第一路模拟信号输出,对汽车进行自动驾驶控制。通过所述第一数模隔离电路可将所述数模转换器u4与汽车的通信接口之间进行隔离输出,避免通信端口信号的不稳定而造成自动驾驶控制器内的数模转换器u4的损坏的问题产生,且整体电路结构简单、生产成本低,满足路况简单的自动驾驶需求。
附图说明
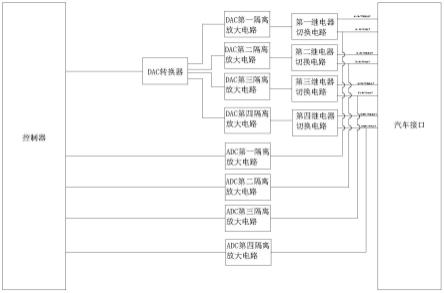
34.图1为本实用新型提供的自动驾驶汽车油门信号采样控制电路结构示意图;
35.图2为本实用新型提供的数模转换器电路结构示意图;
36.图3为本实用新型提供的数模隔离电路、继电器切换电路和模数隔离电路结构示意图。
37.附图标记:
38.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
39.为了使本技术领域的人员更好地理解本实用新型方案,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。
40.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本实用新型的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
41.参阅图1,本实用新型提供一种自动驾驶汽车油门信号采样控制电路,包括:控制器、数模转换器u4、第一数模隔离电路和第一继电器切换电路,所述数模转换器u4的数字信号采集端与所述控制器的油门控制信号输出端连接、第一数模隔离电路和第一继电器切换电路,以将所述油门控制信号转换为对应的模拟信号输出;如图1中所示,所述控制器可根据路况输出油门控制信号,通过通信接口将油门控制信号输出至所述数模转换器u4dac,所述数模转换器u4dac可将所述油门控制信号转为对应当模拟信号,该模拟信号为汽车的油门大小控制信号,通过通信接口输出汽车主控单元,以替代脚踏板的油门控制信号,实现对汽车速度的自动控制。
42.所述第一数模隔离电路与所述数模转换器u4连接,以将第一路模拟信号进行隔离
输出;所述第一数模隔离电路将所述数模转换器u4dac输出的模拟信号隔离输出,以将汽车的通信接口与所述数模转换器u4之间的电平相互隔离,避免通信端口信号的不稳定而造成数模转换器u4的损坏。所述数模转换器u4采用12位的dac的高精度转换芯片,输出稳转,可满足油门信号的控制精度的需求。
43.所述第一继电器切换电路分别与所述控制器、第一数模隔离电路的输出端及汽车接口的第一油门信号控制端连接,以在所述控制器的控制下,将所述第一路模拟信号输出,对汽车进行自动驾驶控制。所述第一继电器切换电路在所述控制器的控制下进行通道的导通控制,通过所述第一继电器切换电路可实现油门在自动驾驶模式和人工的切换,在人工驾驶模式下接入油门踏板输的信号,在自动驾驶下,油门信号接入来自所述第一数模隔离电路输出的油门信号。
44.本实用新型实施例提供的自动驾驶汽车油门信号采样控制电路,通过数模转换器u4的数字信号采集端将所述油门控制信号转换为对应的模拟信号输出;第一数模隔离电路将第一路模拟信号进行隔离输出;第一继电器切换电路在所述控制器的控制下,将所述第一路模拟信号输出,对汽车进行自动驾驶控制。通过所述第一数模隔离电路可将所述数模转换器u4与汽车的通信接口之间进行隔离输出,避免通信端口信号的不稳定而造成自动驾驶控制器内的数模转换器u4的损坏的问题产生,且整体电路结构简单、生产成本低,满足路况简单的自动驾驶需求。
45.参阅图2和图3,所述第一数模隔离电路包括第一运算放大器u5a,所述第一运算放大器u5a的正输入端与所述数模转换器u4的第一模拟信号输出端连接,所述第一运算放电器的负输入端通过第一电阻r15与第一运算放电器u5a的输出端连接,以将所述数模转换器u4输出的第一模拟信号隔离输出。第一运算放大器u5a构成一个电压跟随器,将所述数模转换器u4输出的第一模拟信号隔离直接输出,通过dac1r信号端直接输出至所述第一继电器切换电路的通道选择端,以通过所述第一继电器切换电路的选择输出。
46.第一数模隔离电路还包括:第一稳压二极管d1,所述第一稳压二极管d1 的阴极与所述第一运算放大器u5a的输出端连接,所述第一稳压二极管d1的阳极与参考地连接,以将脉冲干扰信号吸收。通过所述稳压二极管的高压导通特性,可将汽车接口产生的高压脉冲信号滤除,避免高压脉冲信号将所述第一运算放大器u5a的损坏。由于油门控制信号的电压相对较小,无法对所述第一稳压二极管d1反向导通,故第一稳压二极管d1不对第一运算放大器 u5a输出的油门控制信号产生影响。
47.所述第一继电器切换电路包括:三极管q4、继电器j1,所述三极管q4 的基极通过第二电阻r27与所述控制器的一控制端连接,所述三极管q4的发射极与参考地连接,所述三极管q4的发射极还通过第三电阻r30与所述三极管q4的基极连接;由于控制器输出的通道选择信号相对较弱,无法直接驱动所述继电器j1的导通或截止,通过所述三极管q4可将控制器输出的通信选择导通信号rly2_ps进行功率放大后,输出至所述继电器j1,以驱动所述继电器j1快速导通或截止。
48.所述继电器j1的一控制端与所述三极管q4的集电极连接,所述继电器j1 另一控制端与供电电源连接,所述继电器j1的公共端pdl_inr与所述汽车接口的油门信号控制端连接,所述继电器j1的第一选择端dacir与所述第一运算放大器u5a的输出端连接。所述继电器j1的第二选择端pdl_out与所述汽车接口的油门信号脚板端连接。通过所述继电器j1
可对自动驾驶和人工驾驶的切换。当自动驾驶模式时,油门控制信号通过第一选择端dacir输出到汽车的主控单元。当人工驾驶模式时,油门控制信号通过第二选择端pdl_out 输出到汽车的主控单元,以通过汽车控制单元对汽车进行速度控制。具体工作过程为,当自动驾驶模式下,控制器通过rly2_ps7端输出高电平信号,三极管q4导通。继电器j1的第一选择端dacir与公共端pdl_inr之间导通,将自动驾驶模式的油门信号通过pdl_inr端输出至汽车控制单元。相反,当人工驾驶模式时,第二选择端pdl_out与公共端pdl_inr之间导通。将脚踏板油门信号通过pdl_inr端输出至汽车控制单元。
49.所述第一继电器切换电路还包括:二极管d5,所述二极管d5的阳极与所述继电器j1的所述一控制端连接,所述二极管d5的阴极与所述继电器j1的所述另一控制端连接。所述二极管d5并联在所述继电器j1两控制端,在三极管 q4截止时,可将所述继电器j1内的充电线圈的反击电压吸收。避免高压反击电压将所述三极管q4损坏。
50.所述第一继电器切换电路还包括:发光二极管d8和第四电阻r23,所述发光二极管d8的阴极与所述三极管q4的集电极连接;通过所述发光二极管 d8可对自动驾驶和人工驾驶模式的指示,自动驾驶模式时,三极管q4导通,二极管d8上有电流流过,发光二极管d8发光。人工模式时,三极管q4j截止,二极管不发光。如此,可对自动驾驶和人工驾驶模式的指示。
51.所述第四电阻r23的一端与所述发光二极管d8的阳极连接,所述发光二极管d8的阴极与供电电源连接。通过所述第四电阻r23可对发光二极管d8电流进行限制,避免出现大电流将发光二极管d8烧坏。
52.参阅图1和图3,所述自动驾驶汽车油门信号采样控制电路还包括第一模数隔离电路,所述第一模数隔离电路包括:第二运算放大器u8a,所述第二运算放大器的u8a正输入端与所述汽车接口的油门信号控制端继电器j1的公共端pdl_inr连接,所述第二运算放电器u8a的负输入端与通过第五电阻 r37与第一运算放电器的输出端连接,所述第二运算放电器u8a的输出端与所述控制器连接,以对油门信号进行采集。所述第二运算放大器的u8a构成电压跟随器,以将汽车接口的油门信号控制端pdl_inr的实际信号进行采样,并通过隔离后输出至所述控制器,控制器通过电压采用端可获取实际的油门控制信号的大小。通过电压跟随器隔离车端信号与控制器mcu之间的信号。防止尖端电压对控制器mcu的损坏。
53.所述第一模数隔离电路还包括:第六电阻r41、第二稳压二极管d15和电容c13,所述第二运算放大器u8a的正输入端通过所述第六电阻r41与所述汽车接口的油门信号控制端连接;其中,说第六电阻r41的一端与所述第二运算放大器u8a的正输入端连接,所述第六电阻r41的另一端与所述汽车接口的油门信号控制端连接;通过所述第六电阻r41串联在所述汽车接口的油门信号控制端pdl_inr与第二运算放大器u8a的正输入端,以对进入到所述第二运算放大器u8a的电流进行限制,避免汽车接口信号不稳定而产生浪涌电流将所述第二运算放大器u8a损坏。
54.所述第二稳压二极管d15的阳极与所述第六电阻r41的所述另一端连接,所述第二稳压二极管d15的阴极与参考地连接;通过所述第二稳压二极管d15 并联在所述汽车接口的油门信号控制端,当汽车接口的油门信号控制端出现高压脉冲信号时,可将高压脉冲信号吸收,避免高压脉冲信号将是所述第二运算放大器u8a损坏。
55.所述电容c13的一端与所述第六电阻r41的所述一端连接,所述电容c13 的另一端
与参考地连接。通过所述电容c13可将高平干扰信号滤除。保证有效信号进行所述第二运算放大器u8a。
56.参阅图1,所述的自动驾驶汽车油门信号采样控制电路还包括:第二数模隔离电路、第二继电器切换电路、第三数模隔离电路、第三继电器切换电路、第四数模隔离电路和第四继电器切换电路,所述第二数模隔离电路与所述数模转换器连接,以将所述模拟信号进行隔离输出;所述第二继电器切换电路分别与所述控制器、第二数模隔离电路的输出端及汽车接口的第二油门信号控制端连接,以在所述控制器的控制下,将第二路模拟信号输出,对汽车进行自动驾驶控制;所述第三数模隔离电路与所述数模转换器连接,以将所述模拟信号进行隔离输出;所述第三继电器切换电路分别与所述控制器、第三数模隔离电路的输出端及汽车接口的第三油门信号控制端连接,以在所述控制器的控制下,将第三路模拟信号输出,对汽车进行自动驾驶控制;所述第四数模隔离电路与所述数模转换器连接,以将所述模拟信号进行隔离输出;所述第四继电器切换电路分别与所述控制器、第四数模隔离电路的输出端及汽车接口的第四油门信号控制端连接,以在所述控制器的控制下,将第四路模拟信号输出,对汽车进行自动驾驶控制。
57.第一数模隔离电路、第一继电器切换电路、第二数模隔离电路、第二继电器切换电路、第三数模隔离电路、第三继电器切换电路、第四数模隔离电路和第四继电器切换电路构成四路油门控制信号产生电路,其电路结构和工作原理均相同,在此不重复描述。
58.以上仅为本实用新型的实施例,但并不限制本实用新型的专利范围,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来而言,其依然可以对前述各具体实施方式所记载的技术方案进行修改,或者对其中部分技术特征进行等效替换。凡是利用本实用新型说明书及附图内容所做的等效结构,直接或间接运用在其他相关的技术领域,均同理在本实用新型专利保护范围之内。
59.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
60.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在不脱离本实用新型的原理和宗旨的情况下在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1