一种远程智能泊车系统的制作方法
1.本实用新型属于智能泊车技术领域,具体涉及一种远程智能泊车系统。
背景技术:
2.基于当前汽车行业智能化技术的快速发展,越来越多的主机厂开始进行自动驾驶产品研发,而其中泊车辅助也同样属于智能化驾驶不可分割的一部分,而通过对当前已有的主机厂产品体验,发现只有少量车型具备泊车辅助功能。
3.而随着城市的快速扩张和发展,不同车主对于车辆功能的需求也越来越多样化,同时对于泊车辅助的需求也日渐提升,泊车的便捷性需求随之而来,而基于当前大部分主机厂的泊车辅助系统,能够在日常使用为用户的泊车提供部分帮助,但很少能够支持无人场景,需要车主在车辆旁等候泊车完成,无法提供较好的用户体验,用户对于该系统的自动化和智能化不满足,容易产生“不如自己停车方便”的想法,从而导致该系统在实际使用中接受度不高,对于继续使用泊车辅助功能产生排斥感。
技术实现要素:
4.针对现有技术存在的上述不足,本实用新型的目的就在于提供一种远程智能泊车系统,该系统安全性高,能够实现远距离的无人场景泊车,提升用户使用信心,增强用户体验感。
5.本实用新型的技术方案是这样实现的:
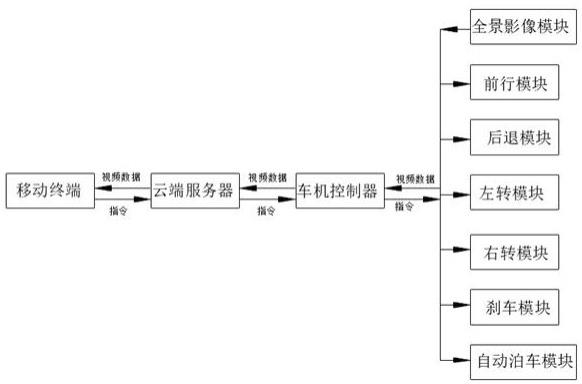
6.一种远程智能泊车系统,包括移动终端、云端服务器、车机控制器和泊车控制器;所述泊车控制器包括全景影像模块,所述全景影像模块用于采集获取车辆周围的视频数据;所述移动终端安装有incall app。
7.所述车机控制器与泊车控制器连接,所述云端服务器和车机控制器连接,所述移动终端和云端服务器连接,泊车控制器采集获取的视频数据经车机控制器、云端服务器上传至移动终端,移动终端发出的指令经云端服务器、车机控制器传送至泊车控制器。
8.进一步地,所述移动终端为手机、ipad或笔记本电脑。
9.进一步地,移动终端和云端服务器之间、云端服务器和车机控制器之间均通过网络进行通讯连接。
10.进一步地,所述网络为4g网络或5g网络。
11.进一步地,车机控制器和泊车控制器通过can总线数据通信连接,以传送指令,同时所述车机控制器通过lvds线和泊车控制器连接,以获取泊车控制器采集到视频数据。
12.进一步地,所述泊车控制器包括前行模块、后退模块、左转模块、右转模块和刹车模块,以分别实现车辆的前行、后退、左转、右转和刹车操作。
13.进一步地,所述泊车控制器还包括自动泊车模块,便于在接收到移动终端下发的指令后完成自动泊车操作。
14.与现有技术相比,本实用新型具有如下有益效果:
15.1、本实用新型无需车主在车辆附近,只需通过移动终端app实时监控车辆周围情况,在保证安全的情况下就完成车辆移动,完成远距离的无人场景泊车,从而能提升用户使用信心,增强用户体验感。
16.2、本实用新型的车机控制器通过lvds线获取泊车控制系统采集的视频数据,进而通过视频压缩的方式透过云端服务器将视频数据传输到移动终端,从而实现视频直播,为远程泊车的安全性提供保障。
附图说明
17.图1-本实用新型的结构示意图。
18.图2-本实用新型的操作说明流程图。
具体实施方式
19.下面结合附图和具体实施方式对本实用新型作进一步详细说明。
20.参见图1,一种远程智能泊车系统,包括移动终端、云端服务器、车机控制器和泊车控制器;所述泊车控制器包括全景影像模块,所述全景影像模块用于采集获取车辆周围的视频数据;所述移动终端安装有incall app。
21.所述车机控制器与泊车控制器连接,所述云端服务器和车机控制器连接,所述移动终端和云端服务器连接,泊车控制器采集获取的视频数据经车机控制器、云端服务器上传至移动终端,移动终端发出的指令经云端服务器、车机控制器传送至泊车控制器。
22.这样,泊车控制器采集获取的视频数据经车机控制器、云端服务器上传至移动终端,使得用户可实时在移动终端查看车辆周围的直播视频,同时用户通过移动终端下达指令经云端服务器、车机控制器传送至泊车控制器,以由泊车控制器完成泊车操作。
23.用户打开移动终端上的incall app,点击远程代客泊车模块,进入远程智能泊车界面点击启动按钮,输入控车码,等待后,弹出启动成功的弹框,随即就可以在移动终端上显示车辆周围的视频画面。
24.从视频画面可查看车辆周围信息,在移动终端的界面的左边为车辆俯视图,右侧默认为车辆前视图,同时画面附有流量使用情况。然后通过操作移动终端上的软按钮,就可以完成泊车操作。
25.具体实施时,所述移动终端为手机、ipad或笔记本电脑。
26.具体实施时,移动终端和云端服务器之间、云端服务器和车机控制器之间均通过网络进行通讯连接。
27.具体实施时,所述网络为4g网络或5g网络。
28.具体实施时,车机控制器和泊车控制器通过can总线数据通信连接,以传送指令,同时所述车机控制器通过lvds线和泊车控制器连接,以获取泊车控制器采集到视频数据。
29.具体实施时,所述泊车控制器包括前行模块、后退模块、左转模块、右转模块和刹车模块,以分别实现车辆的前行、后退、左转、右转和刹车操作。
30.这样,在移动终端上操作软按钮,通过长按“前”、“后”、“左”、“右”方向按钮执行车辆前进、后退、左转、右转操作,移动终端界面右上角显示车辆挡位信息和速度信息,并附有警示语说明“请注意环境安全。长按
‘
前后左右’按键!”或点击“停止”按钮则执行车辆刹车
操作。
31.车辆移动过程时,周围视频数据会实时反馈在移动终端画面上,右侧默认为车辆的前视图,也可通过方向按钮进入车辆的后视图、左视图、右视图。
32.具体实施时,所述泊车控制器还包括自动泊车模块,便于在接收到移动终端下发的指令后完成自动泊车操作。
33.本系统操作流程图如图2所示,并且点击移动终端界面右上角操作菜单,弹窗操作选项:“远程挪车”、“一键泊出”、“一键泊入”。其中:
34.1)远程挪车:继续操作车辆移动,同时泊车控制系统将四个高清全景摄像头的实时画面反馈到手机,当车辆离开车位可泊入范围,可泊入车位信息在画面消失。如果需要退出远程挪车功能,点击左上角关闭按钮,回到智能泊出界面;
35.2)一键泊出:车辆根据前后左右障碍物合理规划泊出路径,右上角显示车辆挡位信息和速度信息,并附有警示语说明“正在泊出中,请注意周围环境!”。车辆按照路径执行泊出动作,同时泊车系统将四个高清全景摄像头的实时画面反馈到手机,在整个过程,车主可通过暂停按钮暂停车辆动作,也可通过该按钮恢复,使车辆继续之前的动作,直到完成泊出,完成后车辆挂p挡打双闪警示灯,同时手机发送“泊出完成,请自行选择退出”弹窗,车主可选择进行其他操作或者直接退出远程挪车功能,回到智能泊车界面;
36.3)一键泊入:车辆根据释放的车位启动自动泊车功能,同时右上角显示车辆挡位信息和速度信息,并附有警示语说明“正在泊入中,请注意周围环境!”,车辆执行泊入动作时泊车系统将四个高清全景摄像头的实时画面反馈到手机,在整个过程,车主可通过暂停按钮暂停车辆动作,也可通过该按钮恢复,使车辆继续之前的动作,直到完成泊入,完成后车辆挂p挡打双闪警示灯,同时手机发送“泊入完成,请自行选择退出”弹窗,车主可选择进行其他操作或者直接退出远程挪车功能,回到智能泊车界面。
37.最后需要说明的是,本实用新型的上述实施例仅是为说明本实用新型所作的举例,而并非是对本实用新型实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其他不同形式的变化和变动。这里无法对所有的实施方式予以穷举。凡是属于本实用新型的技术方案所引申出的显而易见的变化或变动仍处于本实用新型的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1