一种毫米波雷达系统的制作方法
1.本实用新型属于毫米波雷达技术领域,具体的说是一种毫米波雷达系统。
背景技术:
2.毫米波雷达是指工作在毫米波波段探测的雷达。其利用高频电路产生特定调制频率(fmcw)的电磁波,并通过天线发送电磁波和接收从目标反射回来的电磁波,通过发送和接收电磁波的参数来计算目标的各个参数;可以同时对多个目标进行测距、测速以及方位测量;测速是根据多普勒效应,而方位测量(包括水平角度和垂直角度)是通过天线的阵列方式来实现的。
3.近年来,随着测量设备的快速发展,毫米波雷达因技术相较成熟,例如在智能汽车行业中,毫米波雷达系统率先成为adas系统主力传感器之一,常在智能汽车中配置有多个毫米波传感器,实现智能驾驶的部分功能,但由此在一辆汽车的各个方位上布置的毫米波雷达传感器,在部分路况下的智能驾驶功能无需调用所有的毫米波雷达参数,由此造成了性能浪费,同时也增加了测量设备的成本。
技术实现要素:
4.为了弥补现有技术的不足,提高测量设备中单个毫米波雷达传感器性能的利用率,本实用新型提出一种毫米波雷达系统。
5.本实用新型解决其技术问题所采用的技术方案是:本实用新型所述一种毫米波雷达系统,包括:
6.车体;
7.毫米波雷达单体,至少一个毫米波雷达单体安装于所述车体上;
8.基座,至少一个所述毫米波雷达单体固设于所述基座上;
9.载体,用于所述基座移动的载体固设于所述车体上并使所述基座上的毫米波雷达单体的探测面朝向所述车体的外侧;以及
10.驱动部,用于牵引所述基座在载体中移动的驱动部固设于所述载体外侧的车体上。
11.进一步,所述载体包括刚性或塑性材料制成的开放式轨道或封闭式管路。
12.作为一种优选,还包括固设于所述车体下方的弹性管道,弹性管道布设于所述车体的底盘边缘。
13.更进一步,还包括线性布置于所述弹性管道中的若干个电阻应变片,电阻应变片与所述车体mcu通信连接。
14.进一步,所述驱动部包括固设于所述基座上并与所述载体接触的主动轮组;或
15.分别固设于所述基座两端的牵引绳以及载体外侧用于绕卷牵引绳的转盘。
16.进一步,还包括固设于所述基座和/或所述载体上的调整部;所述调整部用于引导所述基座在所述载体对应车体不同方向上的姿态,以改变所述毫米波雷达单体的探测角
度;
17.所述调整部包括安装于基座上的第二主动轮或分别设置于基座与载体接触面上分别卡合的凹凸轨条。
18.本实用新型的有益效果如下:
19.1.本实用新型通过在车体上安装的单个毫米波雷达,利用牵引部驱动基座在载体对应车体一侧的局部区域中往复移动,实现双目及多目测量的作用,以单个毫米波雷达的低成本提升了测量信息的精度。
20.2.本实用新型通过电阻应变片呈环状贴附于弹性管道的内壁上,当车体底盘发生剐蹭导致弹性管道形变时,使相应位置的电阻应变片产生形变,变化的电阻将电信号传输至mcu中,并被车机系统读取反馈至车体内的交互终端上显示,告知驾驶人车体底盘的剐蹭状况,防止车体在出现托底情况。
21.3.本实用新型通过分别设置在载体和基座上相互卡合的凹凸轨条,一方面保持基座在载体中移动路径的稳定,另一方面,通过在凹凸轨条的轨迹上设置弧形凸起区域改变其在载体表面的分布位置,实现对基座姿态的偏转控制,从而实现单个毫米波雷达单体对各方向高精度的测量,替代在单个车体中安装的多个的毫米波雷达单体。
附图说明
22.下面结合附图对本实用新型作进一步说明。
23.图1是本实用新型安装于车体第一视角的示意图;
24.图2是本实用新型安装于车体第二视角的示意图;
25.图3是本实用新型基座结构的示意图;
26.图4是本实用新型采用实施例二的示意图;
27.图5是本实用新型采用实施例三的示意图;
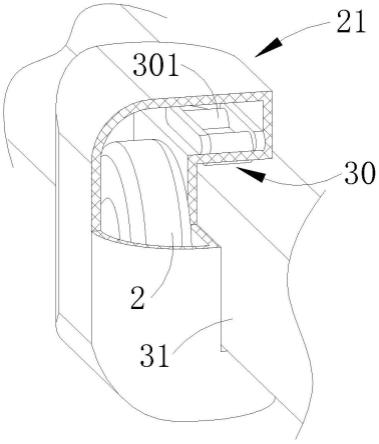
28.图中:1、车体;2、毫米波雷达单体;21、基座;3、载体;30、驱动部;301、主动轮组;302、牵引绳;303、转盘;31、轨道;32、管路;33、弹性管道;331、电阻应变片;4、调整部;41、第二主动轮;42、凹凸轨条。
具体实施方式
29.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
30.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
31.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者
隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
32.实施例一
33.如图1-3所示,本实施例提出了一种毫米波雷达系统,包括:
34.车体1;
35.毫米波雷达单体2,至少一个毫米波雷达单体2安装于所述车体1上;
36.基座21,至少一个所述毫米波雷达单体2固设于所述基座21上;
37.载体3,用于所述基座21移动的载体3固设于所述车体1上并使所述基座21上的毫米波雷达单体2的探测面朝向所述车体1的外侧;以及
38.驱动部30,用于牵引所述基座21在载体3中移动的驱动部30固设于所述载体3外侧的车体1上。
39.工作时,车体1根据运行工况发出指令,使驱动部30例如分别固连在基座21两端的牵引绳302,以及载体3如管路32外侧卷绕牵引绳302的转盘303,拉扯基座21使其沿载体3移动至车体1所需的位置上,以便于毫米波雷达单体2获取车体1外侧相应区域的信息,在车辆处于前进、倒退等不同车况下,调用基座21带动毫米波雷达单体2移动至车体1的相应方位,增加智能汽车依靠毫米波雷达能够获取的外界信息;
40.同样的,还可在车体1上仅安装有单个毫米波雷达时,利用牵引部驱动基座21在载体3对应车体1一侧的局部区域中往复移动,在降低毫米波雷达单体2测量信息刷新率的情况下,实现双目及多目测量的作用,以单个毫米波雷达的低成本提升了测量信息的精度。
41.具体的,所述载体3包括刚性或塑性材料制成的开放式轨道31或封闭式管路32。
42.在本实施例中,使刚性的轨道31或塑性的管路32呈一字型、工字型或闭合型图案,固定在车体1上实现沿载体3移动的基座21携带毫米波雷达单体2对车体1外侧的各方向上进行探测,采用开放式轨道31例如直接利用安装在车体1上方行李架作为载体3,在行李架的表面安装滑动连接的基座21;或采用塑料制成的封闭式管路32,使基座21滑动安装在其中,进而在车体1表面形成一体式轮廓,并降低风阻。
43.更具体的,还包括固设于所述车体1下方的弹性管道33,弹性管道33布设于所述车体1的底盘边缘。
44.本实施例中,设置于车体1底盘边缘的弹性管道33,用于在毫米波雷达单体2布置于车体1底部时作为载体3使用,还能利用弹性材料例如橡胶管道,作为车体1底盘在轻微剐蹭时的缓冲;且橡胶的弹性管道33在剐蹭变形后,能够在转移至安全位置后,通过移动基座21将剐蹭瘪的区域重新顶起,使得在轻微刮蹭后恢复橡胶弹性管道33的形状。
45.更具体的,还包括线性布置于所述弹性管道33中的若干个电阻应变片331,电阻应变片331与所述车体1mcu通信连接。
46.在本实施例中,电阻应变片331呈环状贴附于弹性管道33的内壁上,当车体1底盘发生剐蹭导致弹性管道33形变时,使相应位置的电阻应变片331产生形变,变化的电阻将电信号传输至mcu中,并被车机系统读取反馈至车体1内的交互终端上显示,告知驾驶人车体1底盘的剐蹭状况,防止车体1在出现托底情况。
47.实施例二
48.如图4-5所示,其中与实施例一中相同或相应的部件采用与实施例一相应的附图
标记,为简便起见,下文仅描述与实施例一的区别点。该实施例二与实施例一的不同之处在于:
49.所述驱动部30包括固设于所述基座21上并与所述载体3接触的主动轮组301;和分别固设于所述基座21两端的牵引绳302以及载体3外侧用于绕卷牵引绳302的转盘303。
50.本实施例中,主动轮组301例如安装在基座21上的电机及其驱动轮,带动基座21上的毫米波雷达单体2沿载体3移动;同样的,基座21两端的牵引绳302拉扯基座21使其沿载体3移动至车体1所需的位置上,并使毫米波雷达单体2与车体1mcu间的线路绑缚在牵引绳302上,便于布线。
51.实施例三
52.如图5所示,其中与实施例一中相同或相应的部件采用与实施例一相应的附图标记,为简便起见,下文仅描述与实施例一的区别点。该实施例三与实施例一的不同之处在于:
53.还包括固设于所述基座21和/或所述载体3上的调整部4;所述调整部4用于引导所述基座21在所述载体3对应车体1不同方向上的姿态,以改变所述毫米波雷达单体2的探测角度;
54.所述调整部4包括安装于基座21上的第二主动轮41或分别设置于基座21与载体3接触面上分别卡合的凹凸轨条42。
55.在本实施例中,例如采用垂直于主动轮组301运行的第二主动轮41,使滑动安张于载体3中的基座21的偏转,带动毫米波雷达单体2随之转动调整探测面的角度;同样的,分别设置在载体3和基座21上相互卡合的凹凸轨条42,一方面保持基座21在载体3中移动路径的稳定,另一方面,通过在凹凸轨条42的轨迹上设置弧形凸起区域改变其在载体3表面的分布位置,实现对基座21姿态的偏转控制,从而实现单个毫米波雷达单体2对各方向高精度的测量,替代在单个车体1中安装的多个的毫米波雷达单体2。
56.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1