域控制器及自动驾驶汽车的制作方法
本技术涉及自动驾驶,特别涉及一种域控制器及自动驾驶汽车。
背景技术:
1、l4级别的低速自动驾驶和高速自动驾驶都需要解决感知,融合决策和控制三大核心技术,目前的自动驾驶汽车对路况的感知不够灵敏,使用的域控制器在处理路况信息时不够精确,无法保证无人汽车在高速驾驶时的可靠性及车内乘客的安全,因此,需要提高自动驾驶汽车的域控制器的算力和计算的精确度。
技术实现思路
1、本实用新型的主要目的是提供一种域控制器及自动驾驶汽车,旨在提高自动驾驶汽车的域控制器的算力和计算的精确度。
2、为实现上述目的,本实用新型提出的域控制器,应用于自动驾驶汽车,所述自动驾驶汽车包括多个高清摄像头、多个激光雷达及车载以太网,所述域控制器包括:
3、从soc,用于对多路高清摄像头输出的图像检测信号及多路所述多路车载以太网输出的雷达数据信号进行信号处理,并输出对应的环境处理信号;
4、主soc,所述主soc与所述从soc连接,所述主soc用于根据所述环境处理信号进行信号处理,输出对应的行驶规划信号,以控制自动驾驶汽车的功能模块工作。
5、可选地,所述从soc的数量为两个,分别为第一从soc及第二从soc,所述第一从soc及所述第二从soc分别用于与所述主soc、多路高清摄像头及多路车载以太网电连接;
6、所述第一从soc用于将接收到的多路所述图像检测信号及多路所述雷达数据信号进行信号处理,输出对应的第一环境处理信号;
7、所述第二从soc用于将接收到的多路所述图像检测信号及多路所述雷达数据信号进行信号处理,输出对应的第二环境处理信号;
8、所述主soc用于将接收到的所述第一环境处理信号和/或第二环境处理信号进行信号处理,输出对应的行驶规划信号。
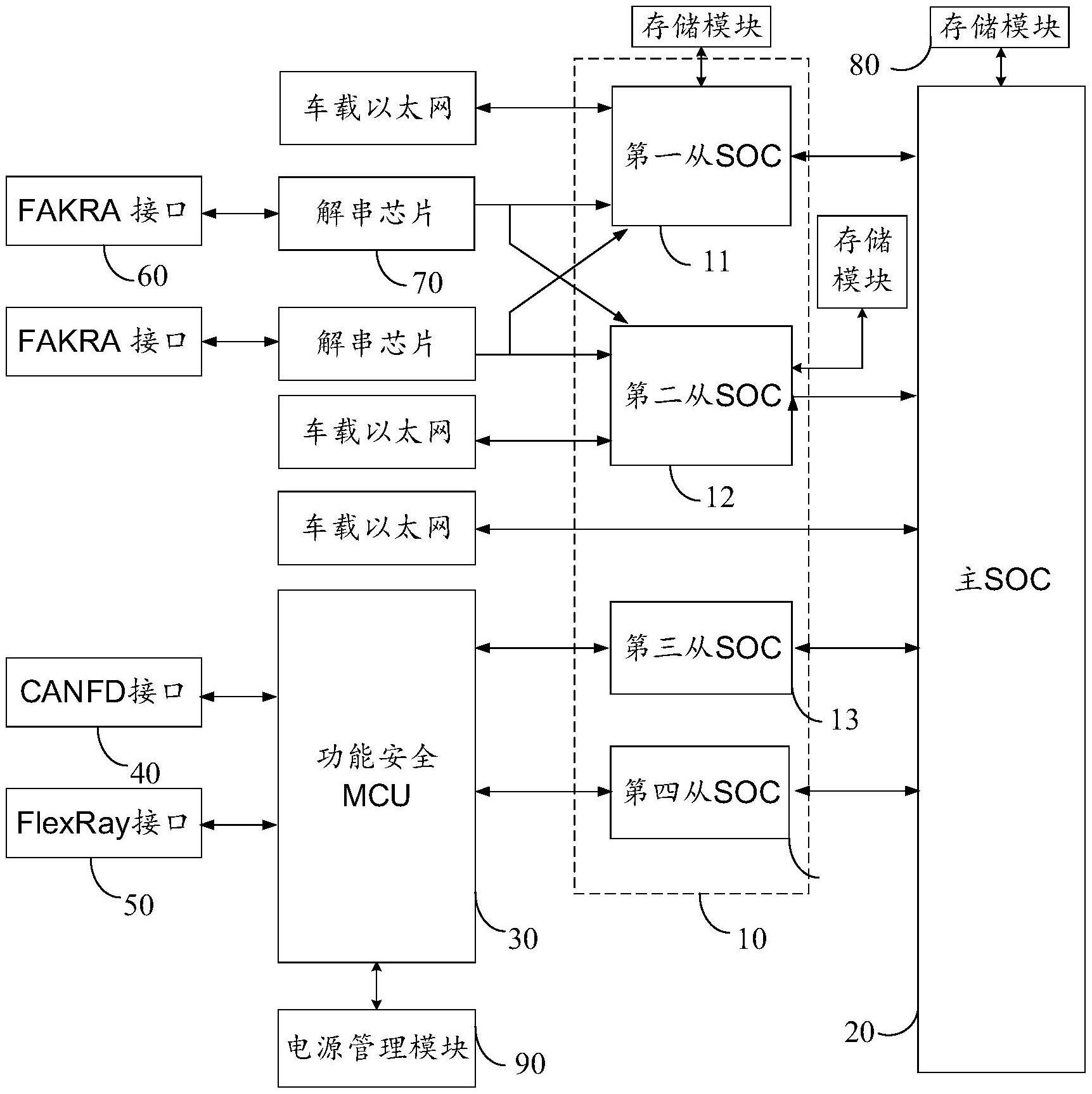
9、可选地,所述从soc的数量为四个,分别为第一从soc、第二从soc、第三从soc及第四从soc,所述第一从soc、所述第二从soc、所述第三从soc及所述第四从soc分别与所述主soc电连接;
10、所述第一从soc用于将接收到的多路所述图像检测信号及多路所述雷达数据信号经所述主soc输出至所述第三从soc和/或所述第四从soc;
11、所述第二从soc用于将接收到的多路所述图像检测信号及多路所述雷达数据信号经所述主soc输出至所述第三从soc和/或所述第四从soc;
12、所述第三从soc及所述第四从soc分别用于将接收到的多路所述图像检测信号及多路所述雷达数据信号进行信号处理,并经所述主soc输出对应的行驶规划信号。
13、可选地,所述自动驾驶汽车还包括驱动组件,所述域控制器还包括:
14、功能安全mcu,所述功能安全mcu与所述主soc电连接,所述功能安全mcu用于将接收到的所述行驶规划信号进行信号处理,并输出对应的驱动控制信号至所述驱动组件,以控制所述驱动组件的行驶路线及行驶速度。
15、可选地,所述域控制器还包括:
16、canfd接口,所述canfd接口与所述功能安全mcu电连接,用于接入毫米波雷达、超声波雷达或车辆控制ecu中的一种或多种。
17、可选地,所述域控制器还包括:
18、flexray接口,所述flexray接口与所述功能安全mcu电连接,用于接入激光雷达、v2x通信模块或eimu检测系统中的一种或多种。
19、可选地,所述域控制器还包括:
20、fakrk接口,所述fakrk接口用于与多路所述高清摄像头输出的图像检测信号电连接,并接入多路所述高清摄像头输出的图像检测信号;
21、解串芯片,所述解串芯片分别与所述fakrk接口及所述从soc电连接,所述解串芯片用于并将接收到的所述图像检测信号进行解码处理,并输出至所述从soc进行信号处理,以输出对应的环境处理信号;
22、所述主soc用于将接收到的所述环境处理信号进行信号处理,输出对应的行驶规划信号。
23、可选地,所述域控制器还包括:
24、多个存储模块,多个所述存储模块分别与所述主soc及所述从soc电连接,多个所述存储模块分别用于储存相应的临时数据。
25、可选地,所述域控制器还包括:
26、多个电源管理模块,多个电源管理模块分别与所述主soc及所述从soc电连接,多个所述电源管理模块分别用于接入直流电源,并分别控制所述直流电源接入/停止接入所述主soc和/或所述从soc。
27、本实用新型还提出一种自动驾驶汽车,所述自动驾驶汽车包括多个高清摄像头、车载以太网及上述的域控制器。
28、本实用新型技术方案通过采用主soc及从soc的多soc互联配置,使所述从soc分别与多路高清摄像头及多路车载以太网连接,能够同时接入多路高清摄像头输出的多路图像检测信号,及多路车载以太网输出的多路雷达数据信号,通过对多路图像检测信号及多路雷达数据信号进行信号处理,得到对应的环境处理信号并输出至所述主soc,由所述主soc根据接收到的环境处理信号模拟得到对应的行驶规划信号并输出,从而控制自动驾驶汽车的前进路径及行驶时的速度。通过多soc处理器高速互联,不同soc数量的配置用以满足l4低速自动驾驶和高速自动驾驶应用场景的多传感器融合技术装置与系统,在成本与性能之间达到最优匹配。所述从soc将接收到的多路所述图像检测信号及多路所述雷达数据信号进行处理后输出再输出至主soc,提高了所述主soc的算力,并由于多soc互联实现了多路高清摄像头及多路车载以太网电连接,提高了自动驾驶汽车环境模拟的准确度,进而保证信号处理时的可靠性,本实施例通过soc多核处理提高自动驾驶汽车的域控制器的算力和计算的精确度,从而提高自动驾驶汽车行驶的安全性。
技术特征:
1.一种域控制器,应用于自动驾驶汽车,所述自动驾驶汽车包括多个高清摄像头、多个激光雷达及车载以太网,其特征在于,所述域控制器包括:
2.如权利要求1所述的域控制器,其特征在于,所述从soc的数量为两个,分别为第一从soc及第二从soc,所述第一从soc及所述第二从soc分别用于与所述主soc、多路高清摄像头及多路车载以太网电连接;
3.如权利要求2所述的域控制器,其特征在于,所述从soc的数量为四个,分别为第一从soc、第二从soc、第三从soc及第四从soc,所述第一从soc、所述第二从soc、所述第三从soc及所述第四从soc分别与所述主soc电连接;
4.如权利要求1所述的域控制器,其特征在于,所述自动驾驶汽车还包括驱动组件,所述域控制器还包括:
5.如权利要求4所述的域控制器,其特征在于,所述域控制器还包括:
6.如权利要求4所述的域控制器,其特征在于,所述域控制器还包括:
7.如权利要求1所述的域控制器,其特征在于,所述域控制器还包括:
8.如权利要求1所述的域控制器,其特征在于,所述域控制器还包括:
9.如权利要求1所述的域控制器,其特征在于,所述域控制器还包括:
10.一种自动驾驶汽车,其特征在于,所述自动驾驶汽车包括多个高清摄像头、车载以太网及如权利要求1-9任意一项所述的域控制器。
技术总结
本技术公开一种域控制器及自动驾驶汽车,其中,所述域控制器包括:从SOC,用于对多路高清摄像头输出的图像检测信号及多路所述多路车载以太网输出的雷达数据信号进行信号处理,并输出对应的环境处理信号;主SOC,所述主SOC与所述从SOC连接,所述主SOC用于根据所述环境处理信号进行信号处理,输出对应的行驶规划信号,以控制自动驾驶汽车的功能模块工作本技术技术方案旨在提高自动驾驶汽车的域控制器的算力和计算的精确度,从而提高自动驾驶汽车行驶的安全性。
技术研发人员:宋朝忠,刘辉
受保护的技术使用者:深圳市易成自动驾驶技术有限公司
技术研发日:20220628
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!