一种车辆盲区可视化监控系统及汽车的制作方法
1.本实用新型涉及汽车辅助安全领域,特别涉及一种车辆盲区可视化监控系统及汽车。
背景技术:
2.汽车智能化的融入是其转变的基础。智能是其功能基础,智能的实现离不开诸多传感器,传感器的增加让车辆对周边环境的感知能力大幅提升。如何将越来越多的传感信息尽心深度融合增加功能并释放客户价值成为当前车企需要深度探究的问题。融合不仅带来了客户价值的提升,同时正向深度推动汽车智能化,使其更安全,更智能。盲区的融合控制可以为用户提供更加准确的盲区预警及信息展示,避免了因盲区造成的交通事故。现有技术的盲区预警仅仅是两颗摄像头对拍摄左右两侧视频为用户提供参考,但是由于视频显示造成无法准确预估距离也会造成事故,单一以视频进行盲区监控无法准确检测盲区内的障碍物,因此现有技术中仅以视频进行盲区检测无法满足盲区监控的目的。
技术实现要素:
3.本实用新型的目的在于提供一种车辆盲区可视化监控系统及汽车,采用视频加超声测距的方式来进行盲区监控,提升盲区监控的准确性和用户体验。
4.为了实现上述目的,本发明采用的技术方案为:一种车辆盲区可视化监控系统,包括盲区摄像头、显示器主机;所述盲区摄像头的输出端连接显示器主机,所述显示器主机用于驱动显示器显示盲区视频;所述监控系统还包括超声波传感系统,所述超声波传感系统用于采集车辆盲区内的障碍物信息,其输出端与显示器主机连接;所述显示器主机用于显示障碍物信息及对应的视频。
5.所述超声波传感系统包括设置在车辆左右两侧超声波传感器,所述超声波传感器用于采集左右两侧的障碍物距离,其输出端连接超声波ecu;所述超声波ecu将检测的障碍物距离数据发送至显示器主机。
6.所述监控系统还包括车速传感器,所述车速传感器的输出端连接超声波ecu,用于在车速低于设定车速阈值发出请求指令至显示器主机中,所述显示器主机驱动显示器显示盲区视频及障碍物距离信息。
7.所述监控系统还包括转向灯检测模块,所述转向灯检测模块用于检测车辆的转向信号,其输出端连接超声波ecu,所述超声波ecu在接收到转向信号后发出请求指令至显示器主机中,显示器主机控制显示器显示转向侧的盲区视频及障碍物距离信息。
8.所述监控系统还包括方向盘转角传感器,所述方向盘转角传感器用于采集方向盘的转角角度,其输出端连接超声波ecu,所述超声波ecu在转交角度大于设定阈值后发出请求指令至显示器主机中,显示器主机控制方向盘转向方向的盲区视频和障碍物距离通过显示器进行显示。
9.所述超声波传感系统以can通信方式通过网关连接至显示器主机。
10.一种汽车,所述汽车采用一种车辆盲区可视化监控系统对车辆盲区进行监控。
11.本实用新型的优点在于:采用视频及超声波探测的距离进行融合显示,使得用户在视频上发现障碍物也可以基于障碍物获取对应的距离,方便用户使用,提高盲区监控的准确和可靠性,提高用户体验;采用超声波传感器探测,成本低,实现简单方便;采用多种自动方式进行盲区暂时,自动在用户转向时给出盲区监控显示、自动在低速下检测到盲区内的障碍物后显示,监控逻辑更加智能化、科技化,符合用户体验的需求。
附图说明
12.下面对本发明说明书各幅附图表达的内容及图中的标记作简要说明:
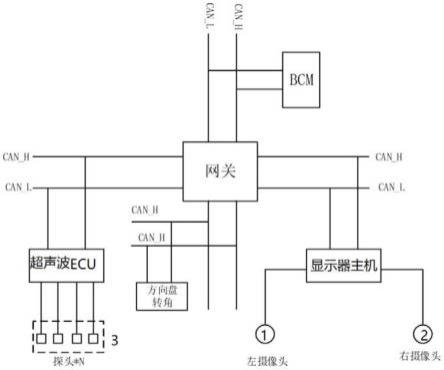
13.图1为本实用新型监控系统原理图;
14.图2为左右盲区示意图。
具体实施方式
15.下面对照附图,通过对最优实施例的描述,对本发明的具体实施方式作进一步详细的说明。
16.本技术针对现有技术中的采用单一的视频进行盲区监控和展示的无法充分提醒用户的缺陷,提供一种超声波和视频融合的车辆盲区可视化系统,综合摄像头的视频优势和超声波测障碍物的优势,方便驾驶员有效查看盲区障碍物及对应的距离,通过打通超声波系统及影像系统信息孤岛,充分利用超声波系统的障碍物探测能力及影像系统的可视化能力,构建盲区可视系统,其在探测的同时并提供车辆周边环境的影像,让驾驶员对盲区内情况一目了然。
17.其方案具体如下:
18.如图1所示,一种车辆盲区可视化监控系统,包括盲区摄像头、显示器主机、超声波传感系统;盲区摄像头的输出端连接显示器主机,显示器主机用于驱动显示器显示盲区视频;
19.盲区摄像头包括做摄像头和右摄像头,左右摄像头分别采集盲区的视频数据,如图2所示,盲区一般为左右两边的侧面及左右后方,本技术所说的盲区是指驾驶员无法直接看到的地方,因为一般驾驶员只会看前方后扭头看后方,但是扭头看后方也会视野受限的。左右摄像头用于分别将两侧的视频数据采集然后由显示器主机对数据进行处理后送入到显示器中进行盲区的图像显示。
20.在本技术中还设置有超声波传感系统,其用于采集车辆盲区内的障碍物信息,其输出端与显示器主机连接;显示器主机用于显示障碍物信息及对应的视频。超声波传感系统用于采集左右盲区内的障碍物及其障碍物距离,将障碍物距离传递至显示器主机中进行显示,可以实现视频显示障碍物图像数据的同时显示距离障碍物的距离方便驾驶员驾驶同时可以根据图像结合距离障碍物的距离进行报警,从而实现了快速的超声波和图像显示的融合,使得盲区影响更加准确可靠。
21.在本技术中超声波传感系统包括设置在车辆左右两侧超声波传感器,超声波传感器用于采集左右两侧的障碍物距离,其输出端连接超声波ecu;超声波ecu将检测的障碍物距离数据发送至显示器主机。左右两侧的超声波传感器每一侧的数量为两个,可以做到对
盲区的障碍物探测的全覆盖。
22.本技术的工作原理如下:在系统启动工作后,左右摄像头采集左右盲区的视频数据,显示器主机通过摄像头采集的图像将图像显示在中控主机的显示器上,从而实现了盲区的视频显示,同时显示器主机实时获取超声波传感器采集的盲区内的障碍物信息如障碍物距离,实时反馈障碍物信息如距离至显示器主机,当距离障碍物距离小于设定的距离阈值时,会通过显示器进行提醒从而实现了快速的提醒,使得视频显示盲区图像的同时给出盲区内的障碍物距离以及基于障碍物距离发出报警信号。或者进一步的可以将障碍物信息和图像信息进行融合显示,方便驾驶员的使用。
23.在本技术的一个优选的实施例中,为了解决现有技术中的盲区监控系统开启方式不智能的问题,本技术提供一种基于速度传感器的自动开启盲区监控的功能,在车辆设置有车速传感器,车速传感器的输出端连接超声波ecu,用于在车速低于设定车速阈值发出请求指令至显示器主机中,显示器主机驱动显示器显示盲区视频及障碍物距离信息。当车速低于设定阈值时,超声波ecu发出请求信号值显示器主机,由显示器主机将盲区图像数据进行显示以及对超声波探测的盲区信息进行显示或基于障碍物距离给出提醒,这样做的目的可以在低速下自动开启盲区监控及超声波探测障碍物的距离过小的提醒,满足用户在低速下的安全行驶。
24.在本技术的零一个优选的实施例中,本技术的监控系统还通过转向灯和转角角度来进行打开。
25.转向灯检测模块用于检测车辆的转向信号,其输出端连接超声波ecu,超声波ecu在接收到转向信号后发出请求指令至显示器主机中,显示器主机控制显示器显示转向侧的盲区视频及障碍物距离信息。当检测到转向灯信号后,此时说明驾驶员有转向意图,需要将转向一侧的图像监控盲区视频在显示器上进行显示,从而做到智能自动的开启盲区监控功能。
26.方向盘转角传感器用于采集方向盘的转角角度,其输出端连接超声波ecu,超声波ecu在转交角度大于设定阈值后发出请求指令至显示器主机中,显示器主机控制方向盘转向方向的盲区视频和障碍物距离通过显示器进行显示。当方向盘转角大于一定角度时此时也是需要转向,因此此时检测到转向角度大于一定角度时超声波ecu向显示器主机发出请求显示的指令,显示器主机控制显示器显示对应一侧的图像信息及根据超声波探测的障碍物距离给出提醒信号。
27.在本技术中超声波传感系统以can通信方式通过网关连接至显示器主机,实现数据的交互和联系。
28.本技术还提供一种汽车,该汽车采用本技术的一种车辆盲区可视化监控系统对车辆盲区进行监控。
29.本盲区可视系统具有如下优点:
30.1)使用超声波系统提供盲区障碍物信息,相较于毫米波系统成本更低
31.2)通过主机显示屏提供盲区影像,盲区视觉化,信息获取更直接。
32.本系统由超声波距离及范围探测传感器,超声波ecu,显示器主机及摄像头,车身控制器提供的转向灯信号,方向盘转角传感器提供的转角信息构成,其具有实时提供车侧盲区影像的能力。
33.其中,超声波传感器,探测距离在3m以上,水平覆盖范围在80
°
以上,能提供车辆周边环境信息。超声波传感器一般安装在车后保或侧边覆盖车周边3m内范围,其具体安装位置可根据具体的盲区要求作详细调整。在探测到障碍物后,ecu通过信号处理手段,识别出具体障碍物信息,并将障碍物信号通过传感器控制模块通过can线将障碍物信息发送给其他ecu,如主机ecu,以供显示和做其他交互逻辑。
34.摄像头主要安装于左右外后镜镜壳上,其安装角度满足能观察车侧盲区的要求,具体分辨率可根据单车要求做具体选型,如1340*1020。车机显示器能提供实时图像显示,方便驾驶员观察盲区内障碍物信息。
35.超声波探头探测车侧3m内障碍物,具体指车左右门3m范围内的障碍物,由于受到超声波传感器探测性质的限制,需在车身侧边布置至少2颗超声波传感器以覆盖车侧盲区。摄像头能清晰观察到车侧15m内障碍物,为了能更好的提供车周边范围内的障碍物信息,建议使用广角镜头,其可视fov不小于180
°
。车机显示器分辨率要求在480*640以上,以提供清晰的盲区信息盲区定义,盲区主要指车侧3m范围内和车后保3米内的范围,如图2所示。
36.超声波传感器通过接受探头的探测信息,通过滤波后获取障碍物信息,并根据系统内盲区的定义判断是否发出请求显示的指令。同时,根据转向灯信号的转向信息以及方向盘的转角信息判断驾驶员转向意图,并根据驾驶员的转向意图优先提供驾驶侧的盲区,使驾驶员能清晰观察驾驶侧环境情况,在车机显示屏幕上向驾驶员提供可行驶的安全区域,协助驾驶员安全驾驶。
37.当超声波系统在左侧盲区探测到障碍物信息时,发出请求显示盲区信号,车机显示屏幕将显示左侧盲区情况。
38.当超声波系统探测到右侧盲区有障碍物信息时,发出请求显示盲区信号,车机显示屏幕将显示右侧盲区情况。当超声波系统探测到左右盲区均有障碍物信息时,主机将同时显示左右盲区情况,可以分区域进行显示。。当车子转向意图明显时(通过车身控制器的转向灯信号或方向盘转角信号,方向盘转角信号优先级高于转向灯信号),仅显示将转向侧盲区障碍物情况,转向意图由方向盘或转向灯信号获取。
39.显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1