一种车轮结构及具有该车轮结构的四轮四转农业机器人的制作方法
本技术涉及一种车轮结构及具有该车轮结构的四轮四转农业机器人,属于农业机器人。
背景技术:
1、农业生产离不开农业机械的参与。农机的介入相比人工劳作提高了工作效率,但是农机的作业范围有限,只适合较大地块;近年来出现的农业机器人具有多种形式,但普遍处在研发验证阶段,使用上也具有很强的特定性和局限性。
2、传统农机和目前农业机器人普遍存在如下三大类问题:
3、1.高杆作物农田作业问题。
4、如:制种玉米抽雄作业。传统农机离地间隙有限,最大只有1米左右,而高杆作物可长到2-3米的高度,普通农机无法进入田中作业。高杆作物田间作业的理想车体结构应是车体中空的龙门式车身结构或拱形车身结构,但是传统农机需要驾驶室空间、发动机空间、转向结构的空间,不可能设计成龙门式有人驾驶农机;
5、市面上如玉米抽雄机价格昂贵,性价比低,维护成本高,使用难度大,作业效果不够完美,现阶段不具有大规模推广的意义。
6、目前农业机器人并未见到龙门式车身构型,大多数体积小,底盘低,多用于果园喷药或采摘等工种。
7、2.农业机器人扭矩小的问题。
8、农业机器人普遍由电机直驱,扭矩较小,或是用履带式、轨道式设计来弥补动力供给的不足。而在轮式农业机器人领域还未见到低转速、大扭矩的农业机器人。
9、传统农机虽然马力大,但大多为两轮驱动,且自身重量过重,而农田土壤松软,承重力低,容易造成农机车轮沉陷、打滑或被杂质阻挡。
10、3.目前的农业机器人没有四轮四转功能。
11、没有四轮四转功能的农机换垄作业转弯半径大。有的农业机器人轮子不可转向,通过差速转向实现转弯,但差速转向易损坏农田的地膜。
12、传统农机为两轮驱动,转向方式较为单一,转弯半径大,作业时的换垄掉头不够灵活。部分有人驾驶农机具有四轮转向功能,但是这种转向方式是按照阿克曼形式的前后轮同时转向,依然需要一定的转弯半径。而有些地形复杂的地头需要原地转向且不损坏地膜,所以需要设计能够四轮原地转向的农业机器人。
13、目前农业机器人可实现原地转向,但是大多没有转向机构,依靠车轮转速调节实现差速转向,可控度较差,精度有限,与地面摩擦力较大,行进调节方向和转向时,极易损坏农田地膜,造成损失。并且农作物种植较密集,限制了农业机械的行进方向、转向空间和活动范围,由于差速转向的可控度较差,还有可能使该类农业机器人误伤农作物植杆,造成农作物减损,影响作业效率。
14、农田地块边界(俗称“地头”)的地形通常较为复杂。以玉米田为例,标准化玉米田较少,大部分玉米田地头普遍杂草丛生或大树等障碍物遮挡,不利于农业机械进行大半径的转弯掉头。所以实际作业中,需要在往返作业间隙掉头时,能够在地头转弯占地空间小,甚至可以原地转向,才能尽最大可能减小对整体作业效率的影响。行进时,如果采用差速调节方向,也会对地面形成摩擦,容易损坏地膜。
技术实现思路
1、为解决上述现有技术的不足,本实用新型提供一种车轮结构及具有该车轮结构的四轮四转农业机器人。
2、本实用新型所采用的技术方案为:
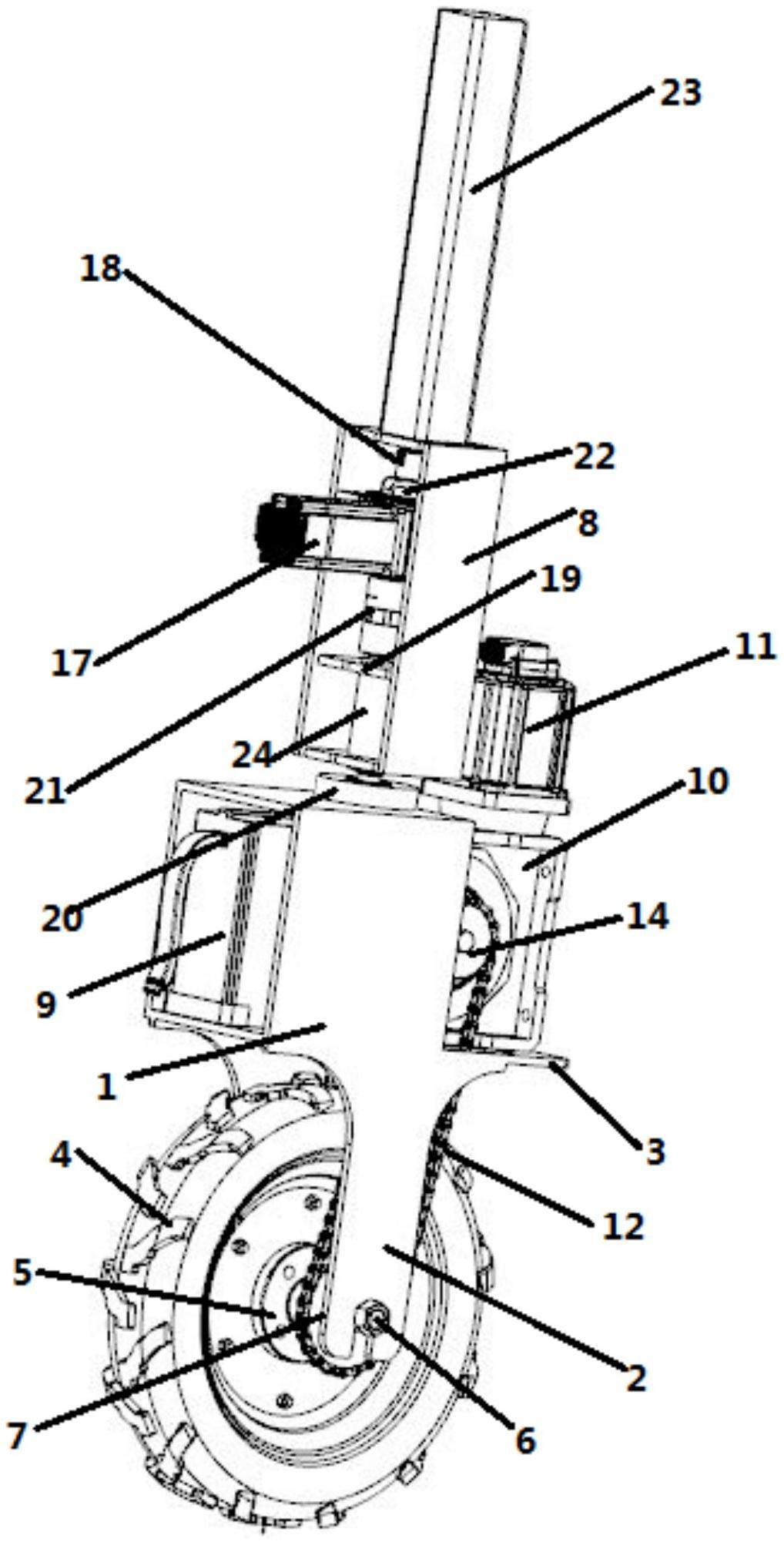
3、一种车轮结构,包括:
4、动力组固定框,动力组固定框的后端底部两侧向下延伸形成固定板,动力组固定框的底板向后延伸形成支撑板;
5、车轮,通过转轴转动设置在两个固定板之间,在转轴上设置有从动链轮;
6、动力机构,设置在支撑板上,用于驱动车轮转动;
7、转向组固定框,设置在动力组固定框上方;
8、转向机构,设置在转向组固定框内,转向机构的执行轴竖直向下穿插过转向组固定框并与动力组固定框的顶部固定连接;
9、动力电池,设置在动力组固定框内,用于为动力机构、转向机构供电。
10、作为本实用新型的一种优选,动力机构包括:
11、动力减速机,设置在支撑板上且动力减速机的前端插入动力组固定框内;
12、动力伺服电机,设置在动力减速机后端顶部并与动力减速机传动连接;
13、传动链条,环绕设置在动力减速机的主动链轮和转轴上的从动链轮上;
14、动力伺服电机驱动动力减速机动作以带动动力减速机上的主动链轮转动,继而通过传动链条带动从动链轮转动以带动车轮转动。
15、作为本实用新型的一种优选,车轮通过车轮法兰固定在转轴上。
16、作为本实用新型的一种优选,在动力组固定框以及支撑板上开设有供传动链条穿插过的槽口。
17、作为本实用新型的一种优选,转向机构包括:
18、转向轴,竖直设置在转向组固定框内,且底端穿插过转向组固定框并与动力组固定框的顶部固定连接,转向轴与转向组固定框转动连接;
19、转向减速机,设置在转向组固定框内,且执行轴通过联轴器与转向轴的顶端固定连接;
20、转向伺服电机,水平设置在转向减速机的前端并与转向减速机传动连接;
21、编码器,通过固定件固定在转向减速机顶部;
22、转向伺服电机驱动转向减速机动作以带动转向减速机的执行轴转动,继而通过联轴器带动转向轴转动以带动车轮转向。
23、作为本实用新型的一种优选,转向轴外套设有转向轴套,在转向组固定框内还水平设置有用于固定转向轴套的支板,转向轴套穿插过支板。
24、作为本实用新型的一种优选,在动力组固定框的顶部设置有用于与转向轴底端固定的固定圈。
25、作为本实用新型的一种优选,在转向组固定框的顶板设置有用于与农业机器人车架上的执行轴向下的升降装置末端连接的升降支架套筒。
26、一种四轮四转农业机器人,用于高杆作物作业,包括四组上述的车轮结构。
27、本实用新型的有益效果在于:
28、1.低速、高扭矩四轮驱动,适用于农田作业环境。
29、通过转向机构和动力机构提供一种低转速、大扭矩的动力传输方案,解决农田土壤、坡地、沟坑、土坎中农业机器人行进困难的问题;
30、2.四轮转向,利于换垄,相比差速转向不会损伤地膜。
31、四轮四转可实现多种转向和行进方式,能够解决换垄转弯问题,四轮转向对地膜损伤很小,对轮胎损耗也很小,能够避免碾压农作物和地膜。
32、3.高度可调,适应高杆作物作业需求。
33、对于高杆作物具有更强的任务执行能力和更好的环境适应能力,能够解决高杆作物农田中运动的通过性问题。
技术特征:
1.一种车轮结构,其特征在于,包括:
2.根据权利要求1所述的一种车轮结构,其特征在于,动力机构包括:
3.根据权利要求2所述的一种车轮结构,其特征在于,车轮通过车轮法兰固定在转轴上。
4.根据权利要求2所述的一种车轮结构,其特征在于,在动力组固定框以及支撑板上开设有供传动链条穿插过的槽口。
5.根据权利要求1所述的一种车轮结构,其特征在于,转向机构包括:
6.根据权利要求5所述的一种车轮结构,其特征在于,转向轴外套设有转向轴套,在转向组固定框内还水平设置有用于固定转向轴套的支板,转向轴套穿插过支板。
7.根据权利要求5所述的一种车轮结构,其特征在于,在动力组固定框的顶部设置有用于与转向轴底端固定的固定圈。
8.根据权利要求1所述的一种车轮结构,其特征在于,在转向组固定框的顶板设置有升降支架套筒。
9.一种四轮四转农业机器人,用于高杆作物作业,其特征在于,包括四组如权利要求1-8任一所述的车轮结构。
技术总结
本技术公开了一种车轮结构,包括动力组固定框、车轮、动力机构、转向组固定框、转向机构以及动力电池,动力组固定框的后端底部两侧向下延伸形成固定板,动力组固定框的底板向后延伸形成支撑板;车轮设置在两个固定板之间,且车轮通过车轮法兰固定在转轴上,转轴的两端与两个固定板转动连接,在转轴上设置有从动链轮;动力机构设置在支撑板上,用于驱动车轮转动;转向组固定框设置在动力组固定框上方;转向机构设置在转向组固定框内,转向机构的执行轴竖直向下穿插过转向组固定框并与动力组固定框的顶部固定连接;动力电池设置在动力组固定框内,用于为动力机构、转向机构供电。本技术还公开了一种具有该车轮结构的四轮四转农业机器人。
技术研发人员:邢志博,马波,李轩,陈献辉,张赫,侯靳凯
受保护的技术使用者:新疆九御科技有限公司
技术研发日:20220830
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!