一种双机器人协作高速重卡换电站的制作方法
本技术涉及重卡换电站设备,尤其涉及一种结构设计合理,运行效率高的双机器人协作高速重卡换电站。
背景技术:
1、随着电动汽车的逐渐普及,越来越多的车型也进入了电动化时代,比如重型卡车。
2、电动汽车的充电方式有两种,一种是需要持续一定时间的充电式,另一种就是直接替换掉旧电池的换电式;由于重卡对电池容量的要求较高,若采用充电式的话,充电时长会较长,不利于实际的运用;
3、目前的重卡换电一般是将卡车停在预定的位置,利用机械手进行吊装更换,所存在的问题有:较难将车停止在精确的位置上,需要花大量时间进行车辆的位置调整;重卡换电站的空间利用率不高;单一机器人工作,效率低下等等;
4、如专利申请号为cn202111541999.7,专利名称为《一种无人充换电站》的发明专利,其具体就公开了一种无人充换电站,该无人充换电站包括框架结构、充电桩、太阳能发电板、搬运机构、停车平台、举升机构和升降机构,框架结构用于存储电动车的电池及多种尺寸规格的锁止模组,锁止模组用于与电池配合,充电桩与框架结构并列设置,太阳能发电板能够给框架结构上的电池充电且为充电桩提供电力,搬运机构可活动地设在框架结构内,搬运机构用于搬运电池或者锁止模组,停车平台与框架结构并列设置,停车平台用于放置电动车,举升机构设在停车平台上且用于举升电动车,升降机构用于驱动锁止模组和/或电池,其具体的换电过程中需要停车平台、举升机构和升降机构的协同运行,效率低下,且成本高。
5、基于此,需要针对现有技术所存在的问题进行改进和改善。
技术实现思路
1、本技术解决的现有技术所存在的问题是:
2、目前的重卡换电一般是将卡车停在预定的位置,利用机械手进行吊装更换,所存在的问题有:较难将车停止在精确的位置上,需要花大量时间进行车辆的位置调整;重卡换电站的空间利用率不高;单一机器人工作,效率低下。
3、本实用新型解决技术问题的方案是:
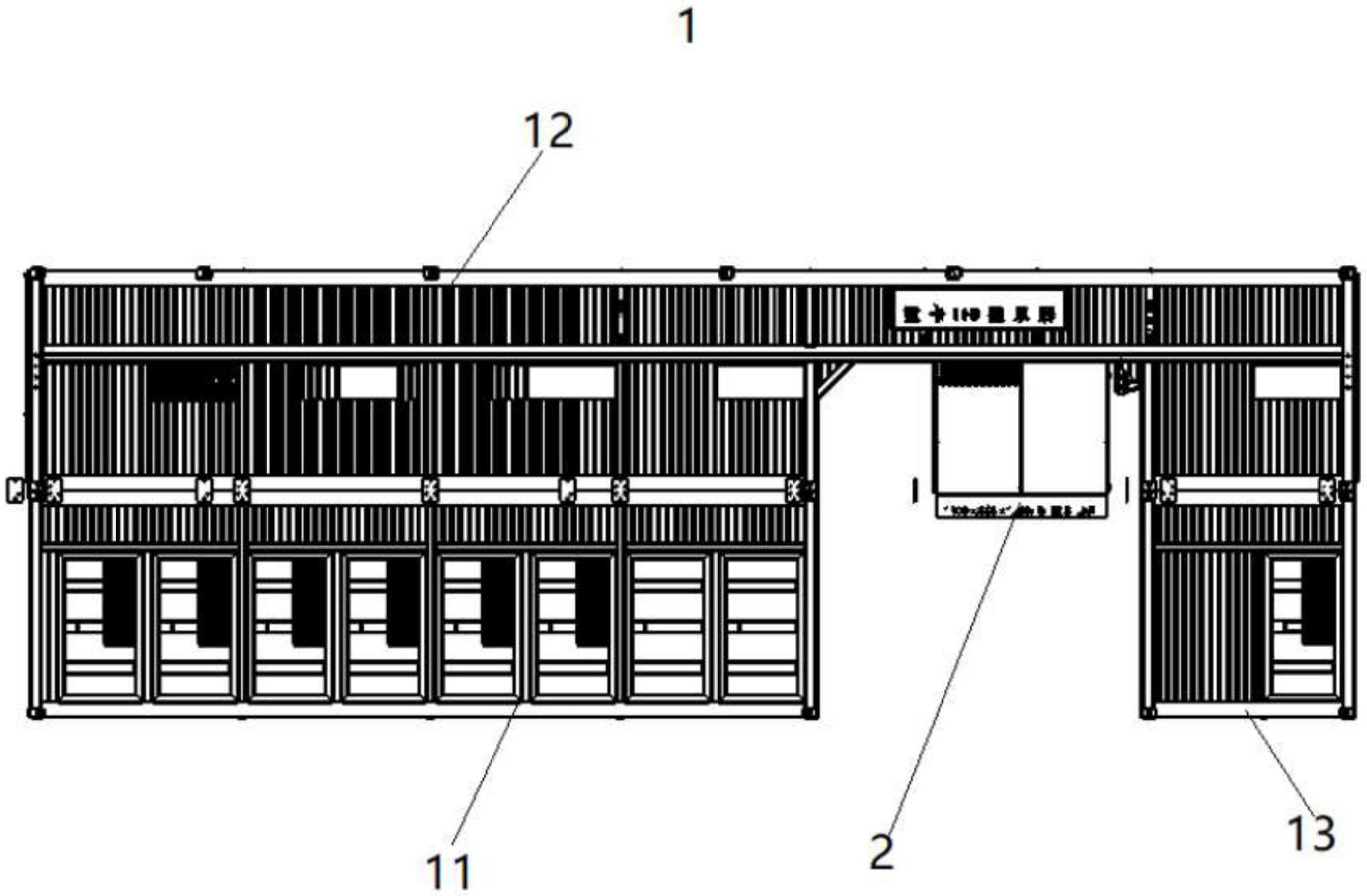
4、提供一种双机器人协作高速重卡换电站,包括换电站主仓体、设置于所述换电站主仓体内部的若干换电电池包、用于对所述换电电池包充电的充电机以及用于移转所述换电电池包的第一换电机器人和第二换电机器人,所述换电站主仓体包括下层的充电机机仓以及处于所述充电机机仓上部的换电电池包仓;所述换电电池包仓上部固定设置有用于设置所述第一换电机器人和第二换电机器人的机器人轨道,所述第一换电机器人和第二换电机器人协作运行;在所述换电站主仓体的内侧贯穿开设有用于停放换电车辆的换电车道;所述换电电池包仓在所述换电车道两侧都开设有用于取放所述换电电池包的换电窗口;所述换电电池包仓底部还并列设置有若干用于放置所述换电电池包的充电底座;所述第一换电机器人包括架设于所述机器人轨道上的第一移动导轨以及安设于所述第一移动导轨上的吊装机器人机构;还包括固定设置于所述机器人轨道一侧部位的控制箱;所述第一移动导轨可在所述机器人轨道上平移移动;所述吊装机器人机构可在所述第一移动导轨上平移移动;所述吊装机器人机构包括搭置于所述第一移动导轨上的吊装机构以及与所述吊装机构通过钢丝绳相连接的电池抓手机构;在所述吊装机构以及所述电池抓手机构上分别设置有用于套设所述钢丝绳的滑轮;所述吊装机构中固定设置有用于驱动所述吊装机构在所述第一移动导轨上移动的第一驱动电机以及用于驱动所述滑轮运转,从而提升所述电池抓手机构的第二驱动电机;还包括用于驱动所述第一换电机器人和第二换电机器人在所述机器人轨道上运行的第三驱动电机。
5、优选地,所述换电电池包仓内部等间距设置有若干用于隔离各所述换电电池包的电池包隔板;各相邻的两所述电池包隔板之间都设置有双烟温传感器;还包括设置于所述换电电池包底侧部位的气溶胶胶枪,用于将气溶胶通入所述换电电池包底部,进行消防控制;所述换电电池包仓内侧还设置有电池隔离灭火仓,用于在紧急情况下将电池包丢人其中,密封灭火。
6、优选地,所述换电车道内侧固定设置有多个用于感测换电车辆停放位置的视觉定位激光摄像头,实现站找车效果。
7、优选地,所述吊装机构以及所述电池抓手机构的滑轮分别固定设置于四个对角部位;所述第二驱动电机固定设置于所述吊装机构的中间部位。
8、优选地,所述吊装机构与所述电池抓手机构之间还设置有用于避免所述电池抓手机构相对于所述吊装机构旋转过大角度的限位杆;所述限位杆固定设置于所述电池抓手机构上,在所述吊装机构上开设有尺寸大于所述限位杆直径的限位孔;所述限位杆插设于所述限位孔中。
9、优选地,所述电池抓手机构包括抓手框架以及可相对于所述抓手框架平移移动的第一抓手和第二抓手;在所述抓手框架上固定设置有用于承载所述第一抓手和所述第二抓手的滑动轨道;还包括设置于所述抓手框架内侧、用于驱动所述第一抓手、所述第二抓手在所述滑动轨道上移动的驱动气缸;所述第一抓手以及所述第二抓手底部都分别设置有用于与外部电池包进行粗定位的粗定位杆;且所述第一抓手以及所述第二抓手下部呈l型弯折,用于插入外部电池包的连接槽或连接孔中。
10、优选地,所述滑动轨道分别对称布设于所述抓手框架的两侧部位;且所述第一抓手与所述第二抓手呈反向设置。
11、优选地,所述抓手框架的中间部位还设置有与所述第一抓手、所述第二抓手形状匹配,用于对所述第一抓手和所述第二抓手进行平面支撑的支撑面板。
12、本技术解决技术问题的有益效果如下:
13、与现有技术相比,本实用新型一种双机器人协作高速重卡换电站通过同时设置换电站主仓体、设置于所述换电站主仓体内部的若干换电电池包2、用于对所述换电电池包2充电的充电机以及用于移转所述换电电池包2的第一换电机器人15和第二换电机器人16,所述换电站主仓体包括下层的充电机机仓11/13以及处于所述充电机机仓11/13上部的换电电池包仓12,所述换电电池包仓12上部固定设置有用于设置所述第一换电机器人15和第二换电机器人16的机器人轨道14,所述第一换电机器人15和第二换电机器人16协作运行,在所述换电站主仓体的内侧贯穿开设有用于停放换电车辆的换电车道,所述换电电池包仓12在所述换电车道两侧都开设有用于取放所述换电电池包2的换电窗口,所述换电电池包仓12底部还并列设置有若干用于放置所述换电电池包2的充电底座,所述第一换电机器人15包括架设于所述机器人轨道14上的第一移动导轨17以及安设于所述第一移动导轨17上的吊装机器人机构,还包括固定设置于所述机器人轨道14一侧部位的控制箱,所述第一移动导轨17可在所述机器人轨道14上平移移动,所述吊装机器人机构可在所述第一移动导轨17上平移移动,所述吊装机器人机构包括搭置于所述第一移动导轨17上的吊装机构以及与所述吊装机构通过钢丝绳相连接的电池抓手机构,在所述吊装机构以及所述电池抓手机构上分别设置有用于套设所述钢丝绳的滑轮,所述吊装机构中固定设置有用于驱动所述吊装机构在所述第一移动导轨17上移动的第一驱动电机以及用于驱动所述滑轮运转,从而提升所述电池抓手机构的第二驱动电机,还包括用于驱动所述第一换电机器人15和第二换电机器人16在所述机器人轨道14上运行的第三驱动电机,实际应用过程中,第一换电机器人15和第二换电机器人16的协同运行,可以极大的提升运行效率,第一换电机器人15预准备一块满电电池包就绪,第二换电机器人16从车辆上取下空电池包,第一换电机器人15迅速将满电池装车,车辆离场后,第二换电机器人16携带空电池包去充电。
- 还没有人留言评论。精彩留言会获得点赞!