一种复合伸缩式车载连接机构的制作方法
1.本实用新型涉及连接机构,尤其涉及一种复合伸缩式车载连接机构。
背景技术:
2.车载连接机构是实现车载式作业装置在运输状态与作业状态间快速转换的运动机构,不同的车载连接机构,其运动形式不同,所形成的空间运动轨迹也不相同。比较典型的连接机构,如多关节挖掘作业臂,相邻关节间多以铰接式连接为主,通过多关节联动,实现不同状态的变换。这种多自由度运动方式,形成的运动轨迹变化多样,适用于对运动过程中的姿态控制精度要求不高的作业。但对于作业过程轨迹精准度要求比较高、且需要实现长距离直线运动的作业装置来说,这类连接机构就无法满足作业需求。又如,起重机作业臂,采用了多套筒式伸缩方式,通过控制油缸伸长量来调节相邻伸缩臂间的长度,实现了单方向上的直线运动,然而对于需要实现小体积紧凑运输、多方向长距离直线运动作业,以及低速随动稳定作业的作业装置来说,上述连接机构也无法满足作业需求。
技术实现要素:
3.本实用新型的目的是提供一种复合伸缩式车载连接机构。
4.本实用新型的目的创新点在于:采用多方向联动伸缩连接、整体与移动平台铰接、作业随动支撑结构等多种耦合机构,通过精确驱动控制,实现连接机构带动末端作业装置小体积紧凑运输、多方向长距离直线运动作业,以及低速随动稳定作业。
5.为实现上述实用新型目的,本实用新型的技术方案是:
6.一种复合伸缩式车载连接机构,包括主支撑臂、一级伸缩臂及二级伸缩臂;所述主支撑臂为截面为“十”字形的框架结构,包括水平支撑臂和垂直支撑臂,所述水平支撑臂和垂直支撑臂均为空心方管;所述垂直支撑臂上端设置主连接销,下端与移动平台尾部铰接;所述水平支撑臂两端设置连接座,所述连接座与转向油缸的伸缩端连接,所述转向油缸的固定端与移动平台连接;
7.所述一级伸缩臂为截面为“e”字形的框架结构,包括水平固定臂、对称设置在水平固定臂两端的左垂直臂与右垂直臂以及设置在水平固定臂中心的中心垂直臂;所述左垂直臂、右垂直臂及中心垂直臂三者平行且均为空心方管;所述中心垂直臂套设在垂直支撑臂内腔,所述中心垂直臂的内腔中设置一级伸缩油缸,所述一级伸缩油缸的固定端与中心垂直臂下端的第一连接销连接,一级伸缩油缸的伸缩端与垂直支撑臂上端的主连接销连接;所述左、右垂直臂内腔中均设置二级伸缩油缸,所述二级伸缩油缸的固定端分别与左垂直臂和右垂直臂下端的第二连接销连接;
8.所述二级伸缩臂包括两根分别套设在左垂直臂与右垂直臂上的左伸缩臂与右伸缩臂;所述左伸缩臂与右伸缩臂均为空心方管,所述左、右伸缩臂的上端均设置辅连接销,所述辅连接销与二级伸缩油缸的伸缩端连接。
9.进一步的,所述左、右伸缩臂下端还设置固定座,所述固定座两端设置连接耳,中
心设置连接轴套。
10.进一步的,所述垂直支撑臂、左伸缩臂及右伸缩臂下端内臂均设置耐磨滑块。
11.进一步的,所述水平固定臂两端还设置导向支撑轮。
12.本实用新型的有益效果是:
13.一是结构紧凑,通过翻转折叠和调整伸缩,能够实现小体积、集约化运输和运输重心控制,机动安全性、稳定性好;
14.二是本机构易实现竖直精准控制,使机构能够在竖直方向进行直线运动,并为垂直向下作业提供有效的直线运动动力,垂直作业效果好;
15.三是采用两级伸缩臂耦合连接结构,能够实现连接机构在竖直方向运动联动控制,有效增大了末端作业装置的作业范围;
16.四是采用导向支撑轮,地形适应能力强,与伸缩油缸配合,可随起伏地面上下浮动,能够有效实现作业深度精确控制、连接机构在机动作业过程中的随动稳定支撑,以及定点作业稳定支撑,作业平稳性好;
17.五是本连接机构与移动平台配合,能够实现定点竖直作业、定点斜坡垂直作业、等高度水平直线作业、变高度水平作业等不同作业形式,能够满足多样化作业任务需求。
附图说明
18.图1为本实用新型结构示意图。
19.图2为本实用新型车载运输状态示意图。
20.图3为本实用新型车载竖直状态定点作业示意图。
21.图4为本实用新型车载竖直状态随动作业示意图。
22.图5为本实用新型车载竖直状态变高度随动作业示意图。
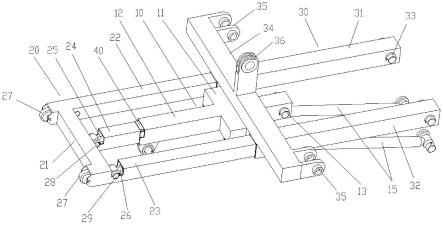
23.图中:10是主支撑臂、11是水平支撑臂、12是垂直支撑臂、13是主连接销、14是连接座、15是转向油缸、20是一级伸缩臂、21是水平固定臂、22是左垂直臂、23是右垂直臂、24是中心垂直臂、25是一级伸缩油缸、26是二级伸缩油缸、27是导向支撑轮、28是第一连接销、29是第二连接销、30是二级伸缩臂、31是左伸缩臂、32是右伸缩臂、33是辅连接销、34是固定座、35是连接耳、36是连接轴套、40是耐磨滑块。
具体实施方式
24.下面将结合附图对本实用新型实施例中的技术方案进行清楚、完整地描述。
25.一种复合伸缩式车载连接机构,包括主支撑臂10、一级伸缩臂20及二级伸缩臂30;所述主支撑臂10为截面为“十”字形的框架结构,包括水平支撑臂11和垂直支撑臂12,所述水平支撑臂11和垂直支撑臂12均为空心方管;所述垂直支撑臂12上端设置主连接销13,下端与移动平台尾部铰接;所述水平支撑臂11两端设置连接座14,所述连接座14与转向油缸15的伸缩端连接,所述转向油缸15的固定端与移动平台连接;
26.所述一级伸缩臂20为截面为“e”字形的框架结构,包括水平固定臂21、对称设置在水平固定臂21两端的左垂直臂22与右垂直臂23以及设置在水平固定臂21中心的中心垂直臂24;所述左垂直臂22、右垂直臂23及中心垂直臂24三者平行且均为空心方管;所述中心垂直臂24套设在垂直支撑臂12内腔,所述中心垂直臂24的内腔中设置一级伸缩油缸25,所述
一级伸缩油缸25的固定端与中心垂直臂24下端的第一连接销28连接,一级伸缩油缸25的伸缩端与垂直支撑臂12上端的主连接销13连接;所述左、右垂直臂22、23内腔中均设置二级伸缩油缸26,所述二级伸缩油缸26的固定端与左垂直臂22和右垂直臂23下端的第二连接销29连接;
27.所述二级伸缩臂30包括两根分别套设在左垂直臂22与右垂直臂23上的左伸缩臂31与右伸缩臂32,;所述左伸缩臂31与右伸缩臂32均为空心方管,所述左、右伸缩臂31、32的上端均设置辅连接销33,所述辅连接销33与二级伸缩油缸26的伸缩端连接;所述固定座34两端设置连接耳35,中心设置连接轴套36。
28.进一步地,所述左、右伸缩臂31、32下端还设置固定座34,所述固定座34两端设置连接耳35,中心设置连接轴套36;作业装置通过连接轴套36与本连接机构连接,并通过油缸与本连接机构上的连接耳35连接,当然也可通过现有的其他安装方式与本连接机构连接,此为现有技术,此处不再赘述。
29.进一步地,所述垂直支撑臂12、左伸缩臂31及右伸缩臂32下端内壁均设置耐磨滑块40;设置耐磨滑块40,一是能够有效保证伸缩臂直线运动效果,二是能够有效降低伸缩臂运动阻力,三是能够有效避免伸缩臂因长时间运动易发生表面磨损。
30.进一步地,所述水平固定臂21两端还设置导向支撑轮27。
31.本连接机构工作原理:
32.一、运输状态控制。如图2所示,调整一级伸缩油缸25缩短至最小尺寸,控制一级伸缩臂20的水平固定臂21与主支撑臂10贴合,调整二级伸缩油缸26伸长至最大尺寸,控制二级伸缩臂30与一级伸缩臂20之间达到最远距离;调整转向油缸15缩短至最小尺寸,翻转主支撑臂10贴近移动平台。
33.二、竖直状态展开与定点作业控制。如图3所示,竖直状态展开:移动平台机动到指定位置后,控制转向油缸15,将主支撑臂10调整至竖直状态。定点作业控制方式一:控制二级伸缩油缸26缓慢收缩,使二级伸缩臂30沿一级伸缩臂20缓慢向下作直线运动(图3中v2标识的运动方向),直至二级伸缩油缸26收缩至最短状态,控制一级伸缩油缸25缓慢伸长,使一级伸缩臂20沿主支撑臂10缓慢向下作直线运动(图3中v1标识的运动方向),直至一级伸缩油缸25伸长至最长状态。定点作业控制方式二:控制一级伸缩油缸25缓慢伸长,使一级伸缩臂20沿主支撑臂10缓慢向下作直线运动(图3中v1标识的运动方向),直至一级伸缩臂20底部导向支撑轮27与地面相接触,控制二级伸缩油缸26缓慢收缩,使二级伸缩臂30沿一级伸缩臂20缓慢向下作直线运动(图3中v2标识的运动方向),直至二级伸缩油缸26收缩至最短状态。定点作业控制方式二中导向支撑轮27能够为定点作业提供稳定支撑。
34.三、竖直状态展开与机动作业随动控制。如图4所示,移动平台机动到指定位置后,控制转向油缸15,将主支撑臂10调整至竖直状态,控制一级伸缩油缸25缓慢伸长,直至一级伸缩臂20底部导向支撑轮27与地面相接触,控制二级伸缩油缸26长度,使二级伸缩臂30沿一级伸缩臂20运动至合适位置,移动平台缓慢行驶,本连接机构在导向支撑轮27的支撑下随机动平台缓慢移动。
35.四、竖直状态展开与变高度机动作业随动控制。如图5所示,机动平台机动到指定位置后,控制转向油缸15,将主支撑臂10调整至竖直状态,控制一级伸缩油缸25缓慢伸长,直至一级伸缩臂20底部导向支撑轮27与地面相接触,控制二级伸缩油缸26变长度运动,使
二级伸缩臂30沿一级伸缩臂20作上下往复运动(图5中v3、v4标识运动方向),同时控制机动平台缓慢行驶,本连接机构在导向支撑轮27的支撑下随机动平台缓慢移动。
36.所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1