使用界限表示进行自动驾驶拓扑规划的系统、方法和计算机程序产品与流程
本公开一般涉及拓扑规划,并且在一些非限制性实施例或方面中,涉及用于扩展拓扑树并且有效地确定用于控制自动驾驶车辆(av)在道路上进行导航的一组候选约束集合的系统、方法和计算机程序产品。相关技术的说明自动驾驶车辆(av)需要在包括公路网络的地图中找到从av的当前位置到指定目的地(例如,目标位置等)的最佳公路/车道级别路径。自主地行驶可能需要路线。然而,在路线上进行导航可能涉及创建通过公路网络的至少一个轨迹或路径,并且可能需要评估任何数量的潜在车道变更(例如,av可能并入到最左边的车道中以进行左转,执行车道变更以超越较慢的对象等)、以及在车道内机动(例如,在对象后方追踪、在静止对象前方停止、在静止对象周围转向等)。创建轨迹来处理车道变更以考虑av的环境中的约束(例如,道路中的对象、其他汽车、行人、公共汽车站、火车交叉路口等),可能涉及处理并且在车辆计算设备的电子存储器中存储定义道路的大量信息,以及计算用于周围道路中的环境中的多个约束中的每个约束的成本函数,直到车辆的目的地。这样的计算还可以考虑车辆的状态,该状态包括车辆的位置和朝向以及av的动态能力。只有这样,才可能通过使所计算的成本最小化并且比较与每个无障碍轨迹相关联的一个或多个成本来确定av从其当前位置到目标位置的无障碍轨迹。为了执行车道变更,av可以执行计算以确定多个可能的候选轨迹,这在计算成本方面可能是无限昂贵的(例如,在计算上不可行等),因为过渡开始/结束位置、过渡开始/结束时间、转向/速度分布等的大量变化。在某些导航条件(诸如密集交通)下,要成功完成车道变更,可能需要av进行复杂的机动,例如,加速并且突然转向到在当前前方有几个车辆的目的地车道中的车辆之间的狭窄间隙中。如果自动驾驶系统只考虑有限数量的车道变更变化,那么在这些情况下就不太可能规划成功的车道变更机动。类似地,对于车道内机动,系统可能通过离散化或随机采样仅对公路网络中的有限数量的候选轨迹进行采样。由于所采样的轨迹的数量有限,当存在可行轨迹时,该方法可能无法找到该可行轨迹,或者该方法可能找到次优轨迹,因为可行轨迹或最优轨迹没有被采样。
背景技术:
技术实现思路
1、因此,公开了用于利用界限(bound)表示进行拓扑规划的改进的计算机实现的系统、方法和计算机程序产品。
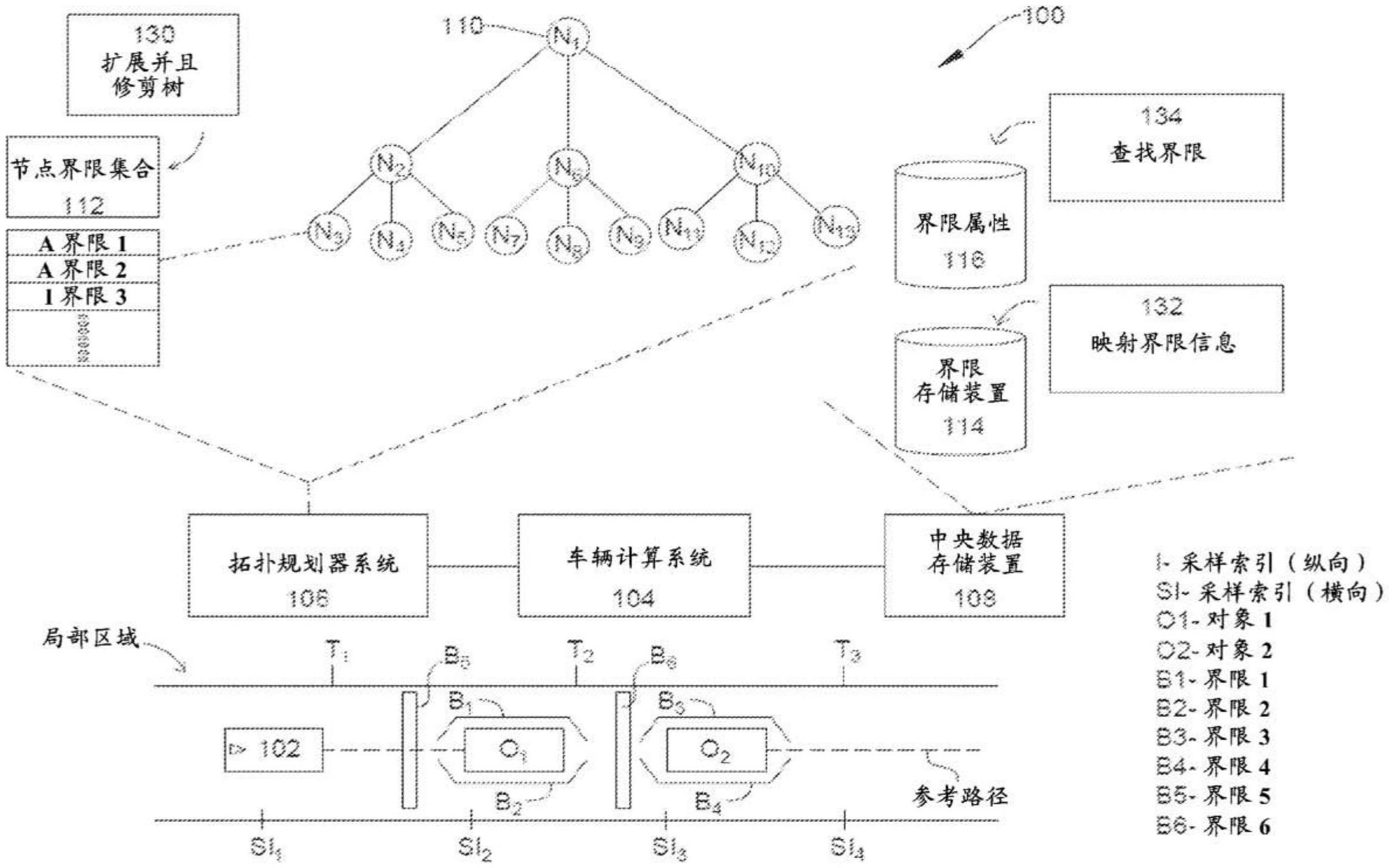
2、根据非限制性实施例或方面,提供了一种使自动驾驶车辆机动而穿越道路上的路线的计算机实现的方法,包括:由所述自动驾驶车辆接收与所述自动驾驶车辆的地理区域中的多个约束相关联的地图数据和传感器数据;由所述自动驾驶车辆的计算系统通过添加多个节点以表示与所述多个约束相关联的多个动作来扩展拓扑树,其中,扩展所述拓扑树包括:由所述计算系统基于与穿越所述地理区域中的道路相关联的所述多个约束中的约束来生成界限,界限与用于相对于该约束来导航所述自动驾驶车辆的动作相关联;由所述计算系统将界限存储在所述自动驾驶车辆的中央界限存储装置中;以及由所述计算系统经由界限标识符将树节点的界限集合链接到存储在所述中央界限存储装置中的界限,其中,界限最初被链接为活动界限,或者替选地,在确定界限不是任何采样索引处最具限制性的界限之后,界限被链接为非活动界限;以及由所述计算系统基于所述拓扑树来控制所述自动驾驶车辆,以在所述多个约束下进行导航。
3、在一些非限制性实施例或方面中,所述计算机实现的方法进一步包括:界限包括纵向界限或横向界限中的至少一个,并且生成界限进一步包括:生成采样索引区间(interval),以通过减少界限比较的数量来确保有效的存储器使用,其中,所述采样索引区间对应于纵向界限的时间区间或横向界限的沿着参考路径的空间区间中的一个。
4、在一些非限制性实施例或方面中,所述计算机实现的方法可以进一步包括:生成多个候选约束集合,所述多个候选约束集合指定用于所有约束选择的语义纵向动作或横向动作,所述多个候选约束集合包括用于确定以下各项中的至少一个的动作的一个或多个界限:在停止线处停止,在右侧通过对象,在左侧通过对象,在后方让行,或在前方追踪;通过优化与所述多个候选集合中的候选约束集合相关联的语义动作来确定轨迹,其中,确定所述轨迹进一步包括基于所述候选约束集合中的约束来确定所述轨迹并且对所述轨迹进行评分,所述候选约束集合基于在所述拓扑树中连接在一起的多个树节点,所述多个节点包括满足约束的所述一个或多个界限,并且所述轨迹包括可行轨迹;以及选择并且启动所述轨迹。
5、在一些非限制性实施例或方面中,所述计算机实现的方法可以进一步包括从所述拓扑树中修剪一个或多个节点,其中,所述修剪包括a)可行性修剪、b)严格冗余修剪、或c)模糊冗余修剪中的至少一个,以消除至少一个节点,用于确定沿着由所述自动驾驶车辆所穿越的道路的地理区域在一个或多个约束下进行导航的轨迹,其中,1)当能够确定在给定车辆的动态限制的情况下结果轨迹不可行时,所述至少一个节点被作为不可行而修剪,或者2)当结果轨迹被确定为类似于另一个节点的轨迹时,所述至少一个节点被作为冗余而修剪,使得只有一个节点能够被考虑。
6、在一些非限制性实施例或方面中,所述计算机实现的方法可以进一步包括以下中的至少一个:a)基于可行性来修剪界限,包括:将界限与多个相对的活动界限进行比较,其中,界限是最小界限并且相对界限是最大界限,或者界限是最大界限并且相对界限是最小界限;确定界限的采样索引区间与相对侧上的所述多个活动界限中的至少一个活动界限的采样索引区间之间的重叠;以及在任何重叠采样索引处,当界限的界限距离和相对界限的界限距离彼此违反可行性容差阈值时,基于不可行性从所述拓扑树中修剪与界限相关联的树节点;b)基于严格冗余来修剪界限,包括:通过比较第一节点中的第一多个活动界限和第二节点中的第二多个活动界限来识别冗余树节点,其中,当所述第一节点和所述第二节点具有相同的活动界限标识符、或者一个或多个折叠界限在冗余容差阈值内时,树节点是冗余的;以及针对冗余,从所述拓扑树中修剪所述冗余树节点;或者c)基于模糊冗余来修剪界限,包括:在每个采样时间/位置处,生成并且在所述中央界限存储装置中存储与树节点的界限集合中的最大限制性界限距离相关联的折叠的最小和最大纵向距离;在多个采样索引处生成多个容差,所述多个容差随着采样的距离在所述多个采样索引中的初始采样的距离之间增加而增加;对于所述多个容差中的每个容差,对于未修剪的每对树节点,当树节点的数量在未修剪树节点的阈值数量以上时,将折叠的最小和最大纵向界限两者与每个采样索引的容差进行比较;以及在所述多个采样索引中的每个采样索引处,当与节点相关联的界限距离在所述多个容差中的容差内时,修剪被发现为最小限制性节点的节点。
7、在一些非限制性实施例或方面中,所述计算机实现的方法进一步包括:模糊冗余包括:当在去除了不可行或严格冗余节点之后仍有难以处理的数量的节点要扩展时,在仍然保持多样化的轨迹选项集合的同时,进一步修剪多个节点。
8、在一些非限制性实施例或方面中,所述计算机实现的方法进一步包括:对于纵向界限,采样索引区间映射到沿着参考路径到第一界限采样的一个或多个时间,或者替选地,对于横向界限,采样索引区间映射到沿着参考路径采样的一个或多个纵向距离。
9、在一些非限制性实施例或方面中,所述计算机实现的方法进一步包括:当相互检查界限时,具有非重叠的采样索引区间的界限能够被作为可行或非冗余而忽略。
10、在一些非限制性实施例或方面中,所述计算机实现的方法可以进一步包括:当确定界限冗余和界限可行性时,通过以下方式来限制搜索域:将对一个或多个界限的搜索限制到被发现与当前采样索引区间相关联的界限,并且将对所述一个或多个界限的搜索限制到仅所述树节点的活动界限集合。
11、在一些非限制性实施例或方面中,所述计算机实现的方法,其中,界限属性没有被存储并且复制到每个树节点中,以及进一步地,其中,当确定可行性修剪和冗余修剪时,能够忽略非活动界限。
12、在一些非限制性实施例或方面中,所述计算机实现的方法可以进一步包括:生成多个折叠界限,以提供模糊冗余修剪的有效实现,并且获得多个多样化的约束集合,其中,所述多个折叠界限是针对每个树节点在整个所述拓扑树中确定的,并且包括每个采样索引处最具限制性的距离。
13、在一些非限制性实施例或方面中,所述计算机实现的方法可以进一步包括:基于所述拓扑树中的多个连接节点来确定候选约束集合,所述多个连接节点满足关于所述多个约束之一的一个或多个约束,并且提供关于所述自动驾驶车辆的横向限制、纵向限制或动态限制的可行轨迹。
14、根据非限制性实施例或方面,提供了一种自动驾驶车辆,包括:一个或多个传感器;以及包括一个或多个处理器的计算系统,其中,所述计算系统被编程和/或配置为:接收与所述自动驾驶车辆的地理区域中的多个约束相关联的地图数据和传感器数据;通过添加多个节点以表示与所述多个约束相关联的多个动作来扩展拓扑树,其中扩展所述拓扑树包括:基于与穿越所述地理区域中的道路相关联的所述多个约束中的约束来生成界限,界限与用于相对于该约束来导航所述自动驾驶车辆的动作相关联;将界限存储在所述自动驾驶车辆的中央界限存储装置中;以及经由界限标识符将树节点的界限集合链接到存储在所述中央界限存储装置中的界限,其中,界限最初被链接为活动界限,或者替选地,在确定界限不是任何采样索引处最具限制性的界限之后,界限被链接为非活动界限;以及基于所述拓扑树来控制所述自动驾驶车辆,以在所述多个约束下进行导航。
15、在一些非限制性实施例或方面中,所述自动驾驶车辆可以进一步包括:界限包括纵向界限或横向界限中的至少一个,并且生成界限进一步包括:生成采样索引区间,以通过减少界限比较的数量来确保有效的存储器使用,其中,所述采样索引区间对应于纵向界限的时间区间或横向界限的沿着参考路径的空间区间中的一个。
16、在一些非限制性实施例或方面中,所述自动驾驶车辆可以进一步包括:所述一个或多个处理器被进一步编程和/或配置为:从所述拓扑树中修剪一个或多个节点,其中,所述修剪包括a)可行性修剪、b)严格冗余修剪、或c)模糊冗余修剪中的至少一个,以消除至少一个节点,用于确定沿着由所述自动驾驶车辆所穿越的道路的地理区域在一个或多个约束下进行导航的轨迹,其中,1)当能够确定在给定车辆的动态限制的情况下结果轨迹不可行时,所述至少一个节点被作为不可行而修剪,或者2)当结果轨迹被确定为类似于另一个节点的轨迹时,所述至少一个节点被作为冗余而修剪,使得只有一个节点能够被考虑。
17、在一些非限制性实施例或方面中,所述自动驾驶车辆可以进一步包括:所述一个或多个处理器被进一步编程和/或配置为通过以下中的至少一个来修剪所述拓扑树:a)基于可行性来修剪界限,包括:将界限与多个相对的活动界限进行比较,其中,界限是最小界限并且相对界限是最大界限,或者界限是最大界限并且相对界限是最小界限;确定界限的采样索引区间与相对侧上的所述多个活动界限中的至少一个活动界限的采样索引区间之间的重叠;以及在任何重叠采样索引处,当界限的界限距离和相对界限的界限距离彼此违反可行性容差阈值时,基于不可行性从所述拓扑树中修剪与界限相关联的树节点;b)基于严格冗余来修剪界限,包括:通过比较第一节点中的第一多个活动界限和第二节点中的第二多个活动界限来识别冗余树节点,其中,当所述第一节点和所述第二节点具有相同的活动界限标识符、或者一个或多个折叠界限在冗余容差阈值内时,树节点是冗余的;以及针对冗余,从所述拓扑树中修剪所述冗余树节点;或者c)基于模糊冗余来修剪界限,包括:在每个采样时间/位置处,生成并且在所述中央界限存储装置中存储与树节点的界限集合中的最大限制性界限距离相关联的折叠的最小和最大纵向距离;在多个采样索引处生成多个容差,所述多个容差随着采样的距离在所述多个采样索引中的初始采样的距离之间增加而增加;对于所述多个容差中的每个容差,对于未修剪的每对树节点,当树节点的数量在未修剪树节点的阈值数量以上时,将折叠的最小和最大纵向界限两者与每个采样索引的容差进行比较;以及在所述多个采样索引中的每个采样索引处,当与节点相关联的界限距离在所述多个容差中的容差内时,修剪被发现为最小限制性节点的节点。
18、在一些非限制性实施例或方面中,所述自动驾驶车辆可以进一步包括模糊冗余,其中,模糊冗余包括:当在去除了不可行或严格冗余节点之后仍有难以处理的数量的节点要扩展时,在仍然保持多样化的轨迹选项集合的同时,进一步修剪多个节点。
19、在一些非限制性实施例或方面中,所述自动驾驶车辆可以进一步包括:对于纵向界限,采样索引区间映射到沿着参考路径到第一界限采样的一个或多个时间,或者替选地,对于横向界限,采样索引区间映射到沿着参考路径采样的一个或多个纵向距离。
20、在一些非限制性实施例或方面中,所述自动驾驶车辆可以进一步包括:所述一个或多个处理器被进一步编程和/或配置为:当确定界限冗余和界限可行性时,通过以下方式来限制搜索域:将对一个或多个界限的搜索限制到被发现与当前采样索引区间相关联的界限,并且将对所述一个或多个界限的搜索限制到仅所述树节点的活动界限集合。
21、根据非限制性实施例或方面,提供了一种用于安全密钥管理的计算机程序产品,包括至少一个非暂时性计算机可读介质,所述至少一个非暂时性计算机可读介质包括一个或多个指令,所述一个或多个指令在由至少一个处理器执行时使得所述至少一个处理器:接收与所述自动驾驶车辆的地理区域中的多个约束相关联的地图数据和传感器数据;通过添加多个节点以表示与所述多个约束相关联的多个动作来扩展拓扑树,其中扩展所述拓扑树包括:基于与穿越所述地理区域中的道路相关联的所述多个约束中的约束来生成界限,界限与用于相对于该约束来导航所述自动驾驶车辆的动作相关联;将界限存储在所述自动驾驶车辆的中央界限存储装置中;以及经由界限标识符将树节点的界限集合链接到存储在所述中央界限存储装置中的界限,其中,界限最初被链接为活动界限,或者替选地,在确定界限不是任何采样索引处最具限制性的界限之后,界限被链接为非活动界限;以及基于所述拓扑树来控制所述自动驾驶车辆,以在所述多个约束下进行导航。
22、在下面编号的条款中阐述了进一步的非限制性实施例或方面:
23、条款1:一种使自动驾驶车辆机动而穿越道路上的路线的计算机实现的方法,包括:由所述自动驾驶车辆接收与所述自动驾驶车辆的地理区域中的多个约束相关联的地图数据和传感器数据;由所述自动驾驶车辆的计算系统通过添加多个节点以表示与所述多个约束相关联的多个动作来扩展拓扑树,其中,扩展所述拓扑树包括:由所述计算系统基于与穿越所述地理区域中的道路相关联的所述多个约束中的约束来生成界限,界限与用于相对于该约束来导航所述自动驾驶车辆的动作相关联;由所述计算系统将界限存储在所述自动驾驶车辆的中央界限存储装置中;以及由所述计算系统经由界限标识符将树节点的界限集合链接到存储在所述中央界限存储装置中的界限,其中,界限最初被链接为活动界限,或者替选地,在确定界限不是任何采样索引处最具限制性的界限之后,界限被链接为非活动界限;以及由所述计算系统基于所述拓扑树来控制所述自动驾驶车辆,以在所述多个约束下进行导航。
24、条款2:根据条款1所述的计算机实现的方法,其中,界限包括纵向界限或横向界限中的至少一个,并且生成界限进一步包括:生成采样索引区间,以通过减少界限比较的数量来确保有效的存储器使用,其中,所述采样索引区间对应于纵向界限的时间区间或横向界限的沿着参考路径的空间区间中的一个。
25、条款3:根据条款1或2所述的计算机实现的方法,进一步包括:生成多个候选约束集合,所述多个候选约束集合指定用于所有约束选择的语义纵向动作或横向动作,所述多个候选约束集合包括用于确定以下各项中的至少一个的动作的一个或多个界限:在停止线处停止,在右侧通过对象,在左侧通过对象,在后方让行,或在前方追踪;通过优化与所述多个候选集合中的候选约束集合相关联的语义动作来确定轨迹,其中,确定所述轨迹进一步包括基于所述候选约束集合中的约束来确定所述轨迹并且对所述轨迹进行评分,所述候选约束集合基于在所述拓扑树中连接在一起的多个树节点,所述多个节点包括满足约束的所述一个或多个界限,并且所述轨迹包括可行轨迹;以及选择并且启动所述轨迹。
26、条款4:根据条款1-3所述的计算机实现的方法,进一步包括从所述拓扑树中修剪一个或多个节点,其中,所述修剪包括a)可行性修剪、b)严格冗余修剪、或c)模糊冗余修剪中的至少一个,以消除至少一个节点,用于确定沿着由所述自动驾驶车辆所穿越的道路的地理区域在一个或多个约束下进行导航的轨迹,其中,1)当能够确定在给定车辆的动态限制的情况下结果轨迹不可行时,所述至少一个节点被作为不可行而修剪,或者2)当结果轨迹被确定为类似于另一个节点的轨迹时,所述至少一个节点被作为冗余而修剪,使得只有一个节点能够被考虑。
27、条款5:根据条款1-4所述的计算机实现的方法,进一步包括以下中的至少一个:a)基于可行性来修剪界限,包括:将界限与多个相对的活动界限进行比较,其中,界限是最小界限并且相对界限是最大界限,或者界限是最大界限并且相对界限是最小界限;确定界限的采样索引区间与相对侧上的所述多个活动界限中的至少一个活动界限的采样索引区间之间的重叠;以及在任何重叠采样索引处,当界限的界限距离和相对界限的界限距离彼此违反可行性容差阈值时,基于不可行性从所述拓扑树中修剪与界限相关联的树节点;b)基于严格冗余来修剪界限,包括:通过比较第一节点中的第一多个活动界限和第二节点中的第二多个活动界限来识别冗余树节点,其中,当所述第一节点和所述第二节点具有相同的活动界限标识符、或者一个或多个折叠界限在冗余容差阈值内时,树节点是冗余的;以及针对冗余,从所述拓扑树中修剪所述冗余树节点;或者c)基于模糊冗余来修剪界限,包括:在每个采样时间/位置处,生成并且在所述中央界限存储装置中存储与树节点的界限集合中的最大限制性界限距离相关联的折叠的最小和最大纵向距离;在多个采样索引处生成多个容差,所述多个容差随着采样的距离在所述多个采样索引中的初始采样的距离之间增加而增加;对于所述多个容差中的每个容差,对于未修剪的每对树节点,当树节点的数量在未修剪树节点的阈值数量以上时,将折叠的最小和最大纵向界限两者与每个采样索引的容差进行比较;以及在所述多个采样索引中的每个采样索引处,当与节点相关联的界限距离在所述多个容差中的容差内时,修剪被发现为最小限制性节点的节点。
28、条款6:根据条款1-5所述的计算机实现的方法,其中,模糊冗余包括:当在去除了不可行或严格冗余节点之后仍有难以处理的数量的节点要扩展时,在仍然保持多样化的轨迹选项集合的同时,进一步修剪多个节点。
29、条款7:根据条款1-6所述的计算机实现的方法,其中,对于纵向界限,采样索引区间映射到沿着参考路径到第一界限采样的一个或多个时间,或者替选地,对于横向界限,采样索引区间映射到沿着参考路径采样的一个或多个纵向距离。
30、条款8:根据条款1-7所述的计算机实现的方法,其中,当相互检查界限时,具有非重叠的采样索引区间的界限能够被作为可行或非冗余而忽略。
31、条款9:根据条款1-8所述的计算机实现的方法,进一步包括:当确定界限冗余和界限可行性时,通过以下方式来限制搜索域:将对一个或多个界限的搜索限制到被发现与当前采样索引区间相关联的界限,并且将对所述一个或多个界限的搜索限制到仅所述树节点的活动界限集合。
32、条款10:根据条款1-9所述的计算机实现的方法,其中,界限属性没有被存储并且复制到每个树节点中,以及进一步地,其中,当确定可行性修剪和冗余修剪时,能够忽略非活动界限。
33、条款11:根据条款1-10所述的计算机实现的方法,进一步包括:生成多个折叠界限,以提供模糊冗余修剪的有效实现,并且获得多个多样化的约束集合,其中,所述多个折叠界限是针对每个树节点在整个所述拓扑树中确定的,并且包括每个采样索引处最具限制性的距离。
34、条款12:根据条款1-11所述的计算机实现的方法,进一步包括:基于所述拓扑树中的多个连接节点来确定候选约束集合,所述多个连接节点满足关于所述多个约束之一的一个或多个约束,并且提供关于所述自动驾驶车辆的横向限制、纵向限制或动态限制的可行轨迹。
35、条款13:一种自动驾驶车辆,包括:一个或多个传感器;以及包括一个或多个处理器的计算系统,其中,所述计算系统被编程和/或配置为:接收与所述自动驾驶车辆的地理区域中的多个约束相关联的地图数据和传感器数据;通过添加多个节点以表示与所述多个约束相关联的多个动作来扩展拓扑树,其中扩展所述拓扑树包括:基于与穿越所述地理区域中的道路相关联的所述多个约束中的约束来生成界限,界限与用于相对于该约束来导航所述自动驾驶车辆的动作相关联;将界限存储在所述自动驾驶车辆的中央界限存储装置中;以及经由界限标识符将树节点的界限集合链接到存储在所述中央界限存储装置中的界限,其中,界限最初被链接为活动界限,或者替选地,在确定界限不是任何采样索引处最具限制性的界限之后,界限被链接为非活动界限;以及基于所述拓扑树来控制所述自动驾驶车辆,以在所述多个约束下进行导航。
36、条款14:根据条款13所述的自动驾驶车辆,其中,界限包括纵向界限或横向界限中的至少一个,并且生成界限进一步包括:生成采样索引区间,以通过减少界限比较的数量来确保有效的存储器使用,其中,所述采样索引区间对应于纵向界限的时间区间或横向界限的沿着参考路径的空间区间中的一个。
37、条款15:根据条款13或14所述的自动驾驶车辆,其中,其中,所述一个或多个处理器被进一步编程和/或配置为:从所述拓扑树中修剪一个或多个节点,其中,所述修剪包括a)可行性修剪、b)严格冗余修剪、或c)模糊冗余修剪中的至少一个,以消除至少一个节点,用于确定沿着由所述自动驾驶车辆所穿越的道路的地理区域在一个或多个约束下进行导航的轨迹,其中,1)当能够确定在给定车辆的动态限制的情况下结果轨迹不可行时,所述至少一个节点被作为不可行而修剪,或者2)当结果轨迹被确定为类似于另一个节点的轨迹时,所述至少一个节点被作为冗余而修剪,使得只有一个节点能够被考虑。
38、条款16:根据条款13-15所述的自动驾驶车辆,其中,所述一个或多个处理器被进一步编程和/或配置为通过以下中的至少一个来修剪所述拓扑树:a)基于可行性来修剪界限,包括:将界限与多个相对的活动界限进行比较,其中,界限是最小界限并且相对界限是最大界限,或者界限是最大界限并且相对界限是最小界限;确定界限的采样索引区间与相对侧上的所述多个活动界限中的至少一个活动界限的采样索引区间之间的重叠;以及在任何重叠采样索引处,当界限的界限距离和相对界限的界限距离彼此违反可行性容差阈值时,基于不可行性从所述拓扑树中修剪与界限相关联的树节点;b)基于严格冗余来修剪界限,包括:通过比较第一节点中的第一多个活动界限和第二节点中的第二多个活动界限来识别冗余树节点,其中,当所述第一节点和所述第二节点具有相同的活动界限标识符、或者一个或多个折叠界限在冗余容差阈值内时,树节点是冗余的;以及针对冗余,从所述拓扑树中修剪所述冗余树节点;或者c)基于模糊冗余来修剪界限,包括:在每个采样时间/位置处,生成并且在所述中央界限存储装置中存储与树节点的界限集合中的最大限制性界限距离相关联的折叠的最小和最大纵向距离;在多个采样索引处生成多个容差,所述多个容差随着采样的距离在所述多个采样索引中的初始采样的距离之间增加而增加;对于所述多个容差中的每个容差,对于未修剪的每对树节点,当树节点的数量在未修剪树节点的阈值数量以上时,将折叠的最小和最大纵向界限两者与每个采样索引的容差进行比较;以及在所述多个采样索引中的每个采样索引处,当与节点相关联的界限距离在所述多个容差中的容差内时,修剪被发现为最小限制性节点的节点。
39、条款17:根据条款13-16所述的自动驾驶车辆,其中,模糊冗余包括:当在去除了不可行或严格冗余节点之后仍有难以处理的数量的节点要扩展时,在仍然保持多样化的轨迹选项集合的同时,进一步修剪多个节点。
40、条款18:根据条款13-17所述的自动驾驶车辆,其中,对于纵向界限,采样索引区间映射到沿着参考路径到第一界限采样的一个或多个时间,或者替选地,对于横向界限,采样索引区间映射到沿着参考路径采样的一个或多个纵向距离。
41、条款19:根据条款13-18所述的自动驾驶车辆,其中,所述一个或多个处理器被进一步编程和/或配置为:当确定界限冗余和界限可行性时,通过以下方式来限制搜索域:将对一个或多个界限的搜索限制到被发现与当前采样索引区间相关联的界限,并且将对所述一个或多个界限的搜索限制到仅所述树节点的活动界限集合。
42、条款20:一种用于利用界限表示进行拓扑规划的计算机程序产品,包括至少一个非暂时性计算机可读介质,所述至少一个非暂时性计算机可读介质包括一个或多个指令,所述一个或多个指令在由至少一个处理器执行时使得一个或多个处理器:接收与所述自动驾驶车辆的地理区域中的多个约束相关联的地图数据和传感器数据;通过添加多个节点以表示与所述多个约束相关联的多个动作来扩展拓扑树;基于与穿越所述地理区域中的道路相关联的所述多个约束中的约束来生成界限,界限与用于相对于该约束来导航所述自动驾驶车辆的动作相关联;将界限存储在所述自动驾驶车辆的中央界限存储装置中;以及经由界限标识符将树节点的界限集合链接到存储在所述中央界限存储装置中的界限,其中,界限最初被链接为活动界限,或者替选地,在确定界限不是任何采样索引处最具限制性的界限之后,界限被链接为非活动界限;以及基于所述拓扑树来控制所述自动驾驶车辆,以在所述多个约束下进行导航。
43、本公开的这些和其他特征和特性,以及相关结构元件的操作方法和功能,以及部件的组合和制造的经济性,在参考附图考虑以下描述和所附权利要求时将变得更加明显,所有这些构成本说明书的一部分,其中相同的参考标号表示各个附图中的对应部分。然而,应当清楚地理解,附图仅用于说明和描述的目的,而不是旨在作为本公开的限制的定义。
- 还没有人留言评论。精彩留言会获得点赞!