车辆近光灯的控制方法、装置、车辆控制器及存储介质与流程
本申请涉及车辆近光灯,特别涉及一种车辆近光灯的控制方法、装置、车辆控制器及存储介质。
背景技术:
1、当前,大部分汽车都配有车灯控制模块,具有近光、远光、位置灯以及转向灯等的控制功能。当车辆因自身运动以及道路发生变化而引起的车辆俯仰角变化时,车辆近光灯照射角度发生变化,当车辆近光灯照射角度过高,高于路上行人的目视高度,此时会引起路人的炫目,从而造成安全隐患;当车辆近光灯照射角度过低,会引起车辆驾驶员行驶过程中对道路前方的可视距离变短,也会造成安全隐患,因此车辆需要根据车辆的俯仰姿态主动的调节近光灯的照射高度。
2、相关技术中,通常通过车辆前后桥的高度传感器采集到的高度信息并计算得到车辆俯仰角度,然后根据车辆俯仰角度变化对车辆近光灯高度进行调节控制。但是,当车辆行驶在在颠簸不平的路面时,由于减震效果车辆俯仰姿态是平稳的,但是车辆前后桥高度传感器可能识别出车辆前后桥高度变化,从而导致计算出车辆俯仰角发生变化,从而导致非预期的对近光灯高度进行了调节,进而造成安全隐患。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的第一个目的在于提出一种车辆近光灯的控制方法,根据车辆的俯仰角和运动状态对近光灯的高度进行调节,避免了非预期的高度调节,提高了近光灯系统的稳定性和可靠性,从而提高了车辆的安全性。
2、本发明的第二个目的在于提出一种计算机可读存储介质。
3、本发明的第三个目的在于提出一种车辆控制器。
4、本发明的第四个目的在于提出一种车辆近光灯的控制装置。
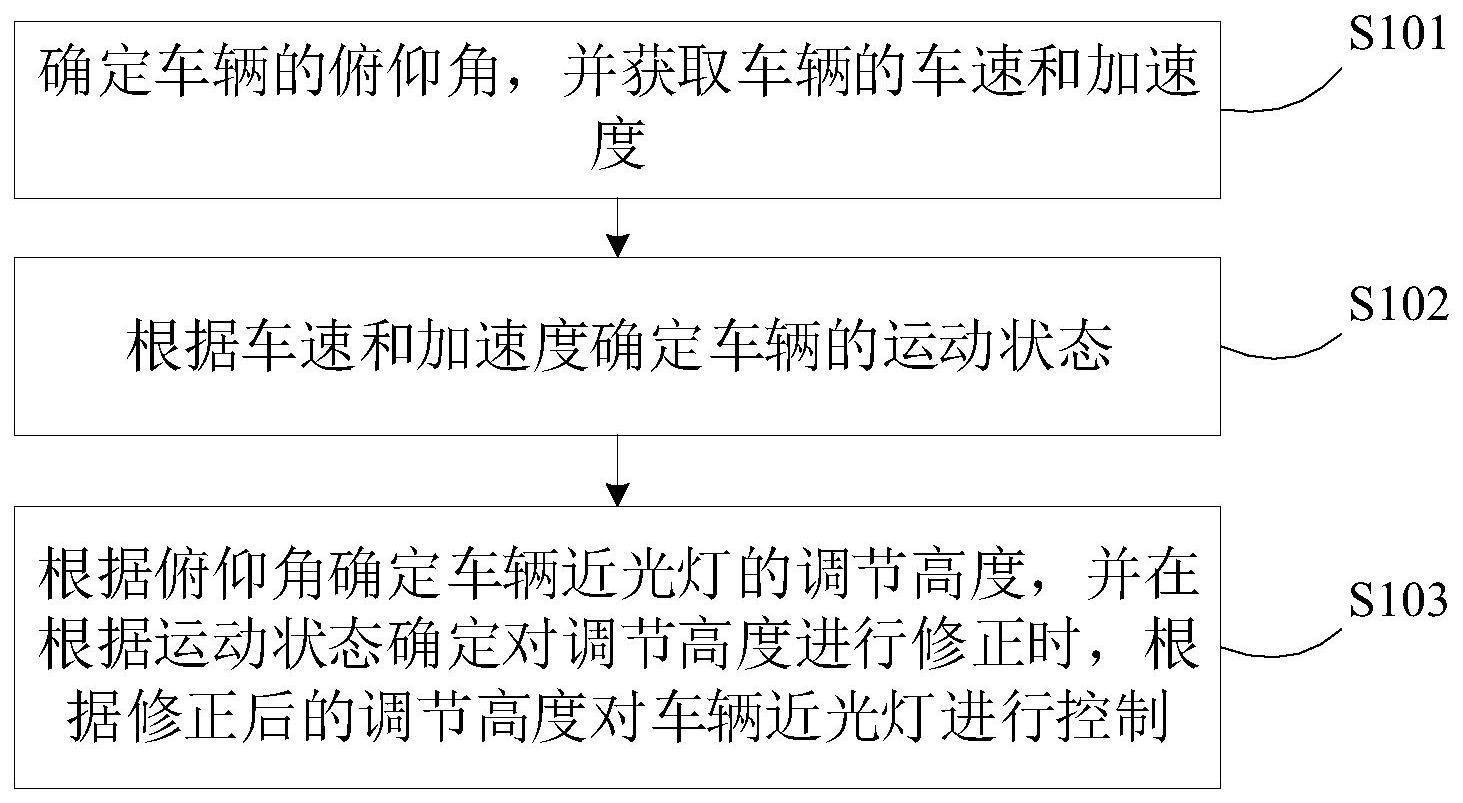
5、为达上述目的,根据本发明第一方面实施例提出了一种车辆近光灯的控制方法,包括:确定车辆的俯仰角,并获取车辆的车速和加速度;根据车速和加速度确定车辆的运动状态;根据俯仰角确定车辆近光灯的调节高度,并在根据运动状态确定对调节高度进行修正时,根据修正后的调节高度对车辆近光灯进行控制。
6、根据本发明实施例的车辆近光灯的控制方法,确定车辆的俯仰角,并获取车辆的车速和加速度,以及根据车速和加速度确定车辆的运动状态,根据俯仰角确定车辆近光灯的调节高度,并在根据运动状态确定对调节高度进行修正时,根据修正后的调节高度对车辆近光灯进行控制。由此,根据车辆的俯仰角和运动状态对车辆近光灯的高度进行调节,当车辆处于颠簸状态时,可以根据运动状态对调节高度进行修正,而不是仅根据车辆的俯仰角对近光灯高度进行调节,从而避免了非预期的高度调节,提高了近光灯系统的稳定性和可靠性,从而提高了车辆的安全性。
7、根据本发明的一个实施例,运动状态包括静止状态、加速状态、减速状态和匀速状态中的至少一种。
8、根据本发明的一个实施例,根据运动状态确定对调节高度进行修正,包括:在运动状态为加速状态或者减速状态时,根据加速度对调节高度进行修正。
9、根据本发明的一个实施例,确定对调节高度进行修正,包括:在加速度增加时,降低调节高度;在加速度减小时,提高调节高度。
10、根据本发明的一个实施例,在运动状态为静止状态或匀速状态时,方法还包括:根据调节高度对车辆近光灯进行控制。
11、根据本发明的一个实施例,确定车辆的俯仰角,包括:获取车辆的前后桥高度,并获取车辆的轴距;根据前后桥高度和轴距计算俯仰角。
12、根据本发明的一个实施例,俯仰角根据以下公式计算:θ=arctan((a–b)/l)/π*180°,其中,θ为俯仰角,a为车辆的前桥高度,b为车辆的后桥高度,l为轴距。
13、为达上述目的,根据本发明第二方面实施例提出了一种计算机可读存储介质,其上存储有车辆近光灯的控制程序,该车辆近光灯的控制程序被处理器执行时实现前述任一实施例的车辆近光灯的控制方法。
14、根据本发明实施例的计算机可读存储介质,通过执行上述的车辆近光灯的控制程序,根据车辆的俯仰角和运动状态对近光灯的高度进行调节,避免了非预期的高度调节,提高了近光灯系统的稳定性和可靠性,从而提高了车辆的安全性。
15、为达上述目的,根据本发明第三方面实施例提出了一种车辆控制器,包括存储器、处理器及存储在存储器上并可在处理器上运行的车辆近光灯的控制程序,处理器执行车辆近光灯的控制程序时,实现前述任一实施例的车辆近光灯的控制方法。
16、根据本发明实施例的车辆控制器,通过处理器执行上述的车辆近光灯的控制程序,根据车辆的俯仰角和运动状态对近光灯的高度进行调节,避免了非预期的高度调节,提高了近光灯系统的稳定性和可靠性,从而提高了车辆的安全性。
17、为达上述目的,根据本发明第四方面实施例提出了一种车辆近光灯的控制装置,包括:第一确定模块,用于确定车辆的俯仰角;获取模块,用于获取车辆的车速和加速度;第二确定模块,用于根据车速和加速度确定车辆的运动状态;控制模块,用于根据俯仰角确定车辆近光灯的调节高度,并在根据运动状态确定对调节高度进行修正时,根据修正后的调节高度对车辆近光灯进行控制。
18、根据本发明实施例的车辆近光灯的控制装置,通过第一确定模块确定车辆的俯仰角,并通过获取模块获取车辆的车速和加速度,以及通过第二确定模块根据车速和加速度确定车辆的运动状态,通过控制模块根据俯仰角确定车辆近光灯的调节高度,并在根据运动状态确定对调节高度进行修正时,根据修正后的调节高度对车辆近光灯进行控制。由此,根据车辆的俯仰角和运动状态对车辆近光灯的高度进行调节,当车辆处于颠簸状态时,可以根据运动状态对调节高度进行修正,而不是仅根据车辆的俯仰角对近光灯高度进行调节,从而避免了非预期的高度调节,提高了近光灯系统的稳定性和可靠性,从而提高了车辆的安全性。
19、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种车辆近光灯的控制方法,其特征在于,包括:
2.根据权利要求1所述的车辆近光灯的控制方法,其特征在于,所述运动状态包括静止状态、加速状态、减速状态和匀速状态中的至少一种。
3.根据权利要求2所述的车辆近光灯的控制方法,其特征在于,根据所述运动状态确定对所述调节高度进行修正,包括:
4.根据权利要求3所述的车辆近光灯的控制方法,其特征在于,根据所述加速度对所述调节高度进行修正,包括:
5.根据权利要求2-4中任一项所述的车辆近光灯的控制方法,其特征在于,在所述运动状态为所述静止状态或所述匀速状态时,所述方法还包括:
6.根据权利要求1所述的车辆近光灯的控制方法,其特征在于,确定车辆的俯仰角,包括:
7.根据权利要求6所述的车辆近光灯的控制方法,其特征在于,所述俯仰角根据以下公式计算:
8.一种计算机可读存储介质,其特征在于,其上存储有车辆近光灯的控制程序,该车辆近光灯的控制程序被处理器执行时实现根据权利要求1-7中任一项所述的车辆近光灯的控制方法。
9.一种车辆控制器,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的车辆近光灯的控制程序,所述处理器执行所述车辆近光灯的控制程序时,实现根据权利要求1-7中任一项所述的车辆近光灯的控制方法。
10.一种车辆近光灯的控制装置,其特征在于,包括:
技术总结
本发明公开了一种车辆近光灯的控制方法、装置、车辆控制器及存储介质,其中,车辆近光灯的控制方法包括:确定车辆的俯仰角,并获取车辆的车速和加速度;根据车速和加速度确定车辆的运动状态;根据俯仰角确定车辆近光灯的调节高度,并在根据运动状态确定对调节高度进行修正时,根据修正后的调节高度对车辆近光灯进行控制。该方法根据车辆的俯仰角和运动状态对车辆近光灯的高度进行调节,当车辆处于颠簸状态时,可以根据运动状态对调节高度进行修正,而不是仅根据车辆的俯仰角对近光灯高度进行调节,从而避免了非预期的高度调节,提高了近光灯系统的稳定性和可靠性,从而提高了车辆的安全性。
技术研发人员:王海荣,武建峰,郭剑鹰,宫雨,李金钢,谢伟
受保护的技术使用者:北京海纳川汽车部件股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!