一种基于车路协同的车辆辅助驾驶方法与流程
本申请涉及一种基于车路协同的车辆辅助驾驶方法。
背景技术:
1、高速公路作为长途出行的主要形式,由于车速快等客观影响,容易出现重大交通事故。而随着车辆端的智能化的进展,车辆的辅助驾驶甚至是自动驾驶提上了日程,但是在其他国家,也发生了大量的因为辅助驾驶或者自动驾驶而发生的车祸,造成了人员伤亡。之所以产生该种情况,主要是因为现阶段的智能化是基于车辆的智能化,道路只是作为一个静态的参考,无法提供动态信息,因此,无法提供足够的参考信息,而对于车辆的辅助驾驶,应当是在有足够信息下才能安全进行,特别是在高车速的情况下。
技术实现思路
1、为了解决上述问题,本申请公开了一种基于车路协同的车辆辅助驾驶方法,包括如下步骤:
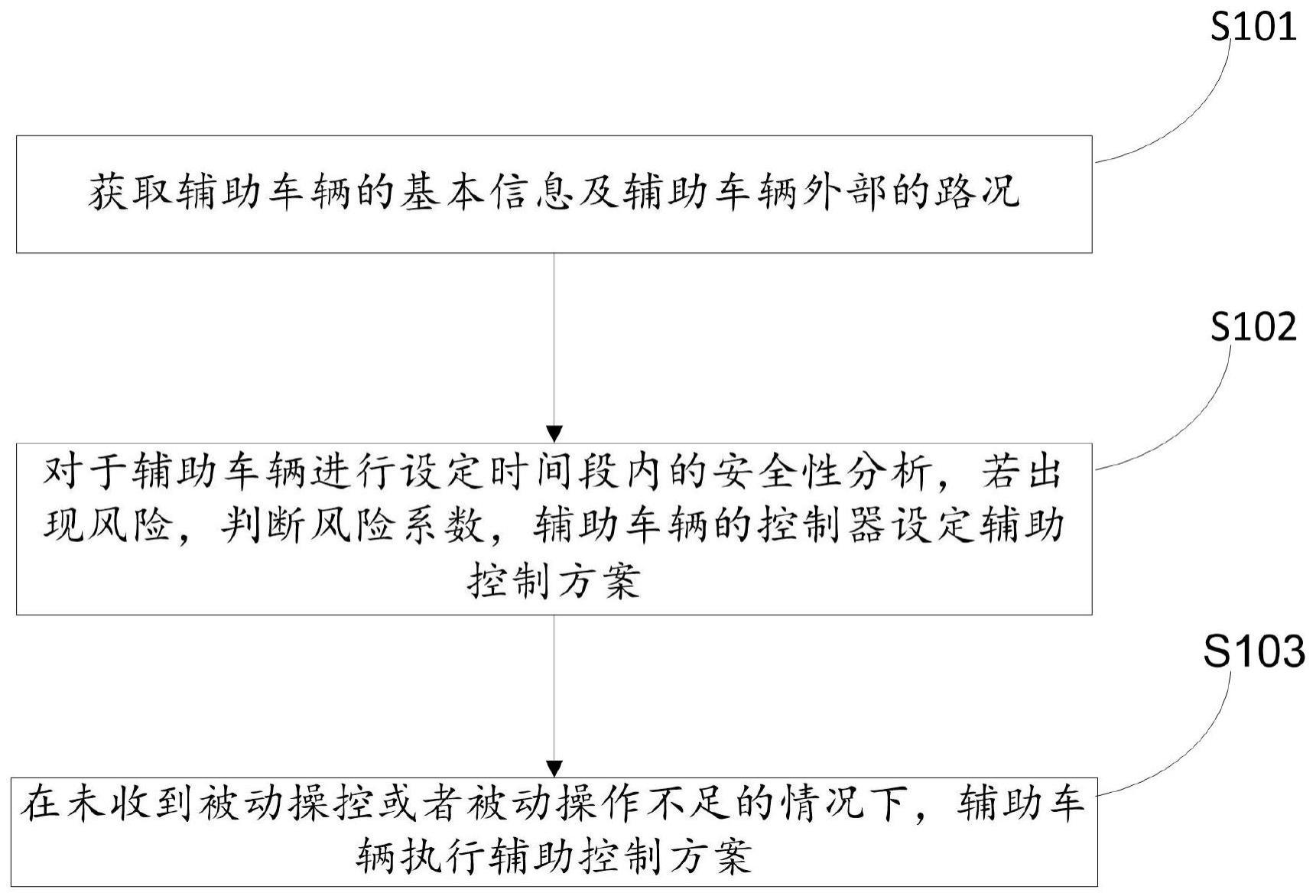
2、获取辅助车辆的基本信息及辅助车辆外部的路况;
3、对于辅助车辆进行设定时间段内的安全性分析,若出现风险,判断风险系数,辅助车辆的控制器设定辅助控制方案;
4、辅助车辆执行辅助控制方案。本申请对于辅助车辆采用内部信息和外部的路况结合的方式来得到辅助控制方案,从而在产生危险时,能够更快的进行数据处理和计算,可以得到适宜的辅助控制方案,然后根据该辅助控制方案来主动干预车辆的行驶状态,从而保证车辆的形式安全。
5、优选的,辅助车辆外部的路况由路端监测器提供给辅助车辆;所述辅助车辆外部的路况包括如下内容:
6、道路情况,包括车道位置、路基位置、车道宽度、道路标志线;
7、其他车辆情况,包括行驶速度、与辅助车辆之间的位置关系、所在车道、行驶方向相对于所在车道中线的偏离角度、与道路标志线的位置关系。
8、优选的,所述风险系数r按照如下方式进行判断:
9、计算辅助车辆的制动距离s1,获取辅助车辆与前方的其他车辆的最近距离s2,获取辅助车辆与后方的其他车辆的最近距离s3,若s1>s2,r设定为100并进行紧急避让;否则r=10*(s1/s2)+5*(s1/s3),并根据风险系数高低向辅助车辆发送紧急性提醒。本申请通过制动距离与前后车辆的距离进行风险判断,不论是前方距离还是后方距离,在距离过小时,都有较大的风险,采用该判断系数能够监测到大多数的风险,从而保证对于风险点判断的准确性。
10、优选的,所述基本信息包括道路端信息和车辆端数据;
11、所述道路端信息包括测量得到的辅助车辆与其他车辆之间的车辆距离、辅助车辆与路基之间的车路距离、辅助车辆行驶速度、辅助车辆所在车道、辅助车辆中轴线与车道中轴线之间的中轴距离、辅助车辆中轴线偏离车道中轴线的偏离角度;
12、所述车辆端数据包括辅助车辆行驶速度、辅助车辆预定加速度、辅助车辆预定行驶偏离角度。
13、优选的,若r>20,先进行数据校准,然后再进行紧急避让。
14、优选的,所述数据校准按照如下方式进行测试:
15、根据道路端数据进行计算模拟,得到在5s内会发生直接碰撞的预测场景;
16、将预测场景当中涉及到的车辆进行抽离,结合其所处位置的道路基础条件信息,若道路基础条件完善,对于车辆中轴线与车道中轴线之间的中轴距离、车辆中轴线偏离车道中轴线的偏离角度在设定阈值范围内的,将车辆位置校正在车道中轴线上,将偏离角度设定为0;
17、然后对于校正后的道路端数据进行计算模拟,将危险发生时间低于预警阈值的数据进行提取得到一级数据,根据一级数据从涉及到的车辆提取车辆端数据作为一级匹配数据;
18、所述预警阈值为3s。
19、优选的,所述一级数据按照如下方式产生:若预测产生车辆碰撞时,车辆中轴线偏离车道中轴线的偏离角度超过10°,则将车辆距离或车路距离、车辆中轴线偏离车道中轴线的偏离角度、车辆行驶速度作为一级数据,车辆预定加速度、车辆预定行驶偏离角度作为一级匹配数据;
20、若预测产生车辆碰撞时,车辆中轴线偏离车道中轴线的偏离角度不超过10°,则将车辆距离或车路距离、车辆行驶速度作为一级数据,车辆预定行驶偏离角度作为一级匹配数据。本申请首先进行预计算模拟,得到预测场景,然后进一步的集中化可能会发生碰撞的车辆信息,然后考虑到自我调整的可能性,对于数据进行二次修正,在二次修正之后,重新进行计算模拟,从而得到更接近实际情况的筛选效果。
21、优选的,将一级数据和一级匹配数据传输给辅助车辆的控制器,所述控制器将一级数据和一级匹配数据处理后得到辅助控制方案,车辆端立即执行该辅助控制方案。
22、优选的,所述辅助控制方案包括车道变更及安全减速。
23、优选的,所述设定时间段不超过20s。
24、本申请能够带来如下有益效果:
25、1.本申请对于辅助车辆采用内部信息和外部的路况结合的方式来得到辅助控制方案,从而在产生危险时,能够更快的进行数据处理和计算,可以得到适宜的辅助控制方案,然后根据该辅助控制方案来主动干预车辆的行驶状态,从而保证车辆的形式安全。
26、2.本申请通过制动距离与前后车辆的距离进行风险判断,不论是前方距离还是后方距离,在距离过小时,都有较大的风险,采用该判断系数能够监测到大多数的风险,从而保证对于风险点判断的准确性。
27、3.本申请首先进行预计算模拟,得到预测场景,然后进一步的集中化可能会发生碰撞的车辆信息,然后考虑到自我调整的可能性,对于数据进行二次修正,在二次修正之后,重新进行计算模拟,从而得到更接近实际情况的筛选效果。
技术特征:
1.一种基于车路协同的车辆辅助驾驶方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种基于车路协同的车辆辅助驾驶方法,其特征在于:辅助车辆外部的路况由路端监测器提供给辅助车辆;所述辅助车辆外部的路况包括如下内容:
3.根据权利要求1所述的一种基于车路协同的车辆辅助驾驶方法,其特征在于:所述风险系数r按照如下方式进行判断:
4.根据权利要求3所述的一种基于车路协同的车辆辅助驾驶方法,其特征在于:所述基本信息包括道路端信息和车辆端数据;
5.根据权利要求4所述的一种基于车路协同的车辆辅助驾驶方法,其特征在于:若r>20,先进行数据校准,然后再进行紧急避让。
6.根据权利要求5所述的一种高速公路用车路协同信息传输方法,其特征在于:所述数据校准按照如下方式进行测试:
7.根据权利要求6所述的一种基于车路协同的车辆辅助驾驶方法,其特征在于:所述一级数据按照如下方式产生:若预测产生车辆碰撞时,车辆中轴线偏离车道中轴线的偏离角度超过10°,则将车辆距离或车路距离、车辆中轴线偏离车道中轴线的偏离角度、车辆行驶速度作为一级数据,车辆预定加速度、车辆预定行驶偏离角度作为一级匹配数据;
8.根据权利要求7所述的一种基于车路协同的车辆辅助驾驶方法,其特征在于:将一级数据和一级匹配数据传输给辅助车辆的控制器,所述控制器将一级数据和一级匹配数据处理后得到辅助控制方案,车辆端立即执行该辅助控制方案。
9.根据权利要求8所述的一种基于车路协同的车辆辅助驾驶方法,其特征在于:所述辅助控制方案包括车道变更及安全减速。
10.根据权利要求1所述的一种基于车路协同的车辆辅助驾驶方法,其特征在于:所述设定时间段不超过20s。
技术总结
一种基于车路协同的车辆辅助驾驶方法,包括如下步骤:获取辅助车辆的基本信息及辅助车辆外部的路况;对于辅助车辆进行设定时间段内的安全性分析,若出现风险,判断风险系数,辅助车辆的控制器设定辅助控制方案;辅助车辆执行辅助控制方案。本申请对于辅助车辆采用内部信息和外部的路况结合的方式来得到辅助控制方案,从而在产生危险时,能够更快的进行数据处理和计算,可以得到适宜的辅助控制方案,然后根据该辅助控制方案来主动干预车辆的行驶状态,从而保证车辆的形式安全。
技术研发人员:曹正彬,胡继波,吕涛,王熙宇,程卫平,岳燕飞
受保护的技术使用者:山东高速信息集团有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!