一种无人物流车控制系统的制作方法
本发明涉及无人物流车,特别涉及一种无人物流车控制系统。
背景技术:
1、物流车是安装有四只脚轮的运送与储存物料的单元移动集装设备,无人物流车是通过无人控制系统对物流车进行控制的车辆,常用于大型超市的物流配送或工厂工序间的物流周转。
2、在现有的无人物流车的使用过程中,现有的无人物流车控制系统随意能使物流车实现无人驾驶,但是由于物流车的装置内腔具备移动高度,运送的物品需要人工搬运上车,在运输的物品重量较大的情况下,耗费的人力较大,无法实现无人物流车使用的便捷性,导致无人物流车运输物品的装载困难,使无人物流车及无人物流车的控制功能性不足。
技术实现思路
1、本发明的目的在于提供一种无人物流车控制系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种无人物流车控制系统,包括:
3、物流车本体,用于运送物品:
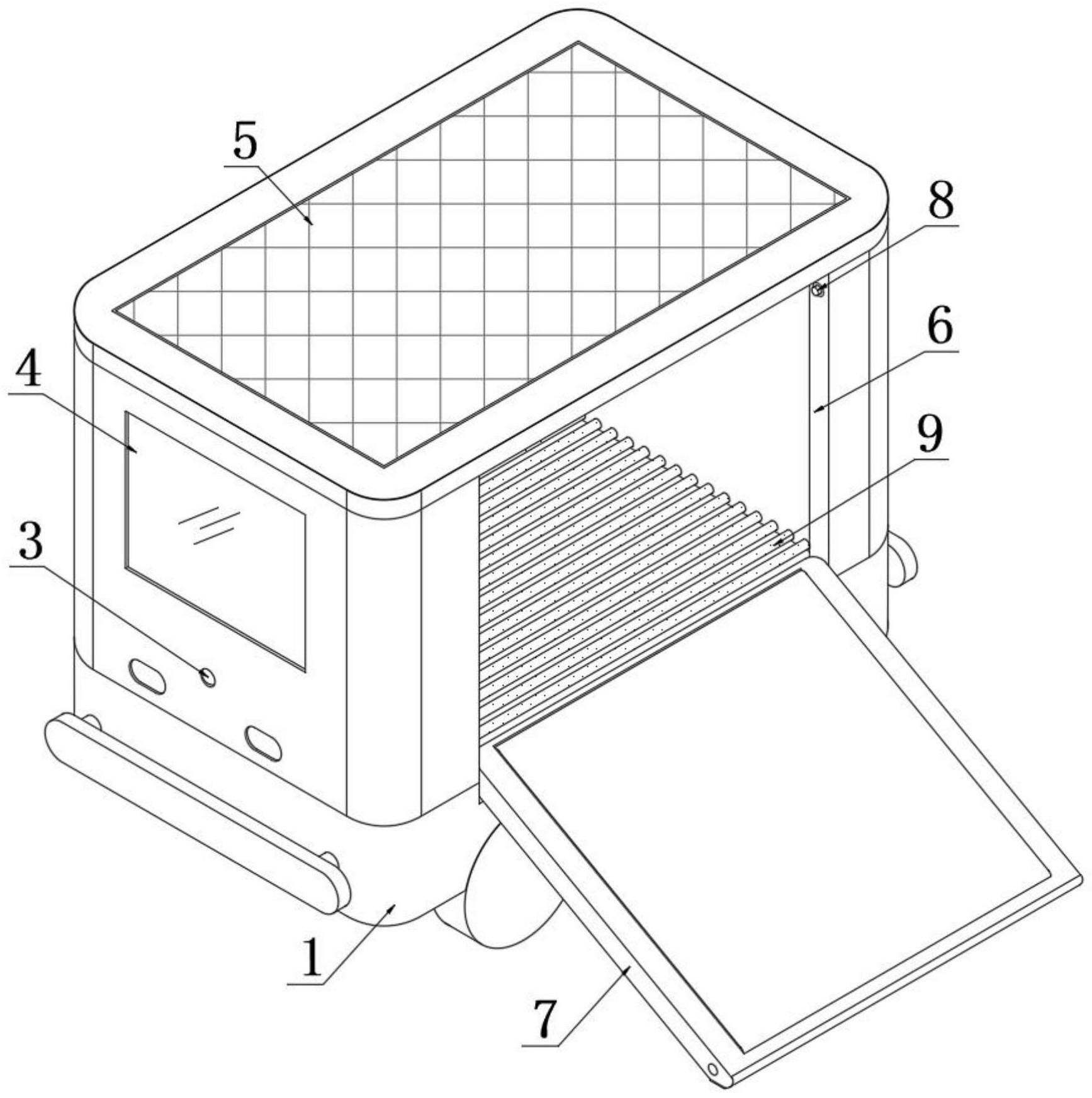
4、所述物流车本体的一端设置有控制系统组件,所述物流车本体的一端固定嵌设有摄像头,所述物流车本体一端的顶部固定嵌设有显示屏,所述物流车本体的顶部固定嵌设有太阳能板;
5、物流车本体的一侧开设有进料口,所述进料口的内腔设置有防护门机构,所述进料口顶部的两边侧均嵌设有液压缸;
6、所述物流车本体的内腔设置有用于物品放置的移动机构。
7、优选的,所述控制系统组件包含电源模块、电子控制模块、车身控制模块、通信模块和驱动模块,所述电源模块、电子控制模块、车身控制模块、通信模块和驱动模块均固定嵌设于物流车本体的一端。
8、优选的,所述防护门机构包含固定门、连接槽、传送带、两个转动轴、伺服电机、两个定位管和两个卡槽,所述固定门的底部通过两个定位管与进料口的底部转动连接,所述传送带设置于连接槽的内腔,两个所述转动轴设置于传送带内腔的两端,所述伺服电机的输出端与其中一个转动轴的一端传动连接,所述液压缸的一端与卡槽的内腔滑动穿插连接。
9、优选的,所述连接槽开设于固定门的一面,所述转动轴的两端分别通过轴承与连接槽内壁的两边侧转动穿插连接,其中一个所述转动轴的两端分别通过轴承与进料口底部的两边侧转动穿插连接,所述伺服电机嵌设于物流车本体的一端,两个所述定位管分别固定于固定门一端的两边侧,所述定位管的一端通过轴承与进料口的内壁转动穿插连接,两个所述卡槽分别开设于固定门另一端的两边侧。
10、优选的,所述移动机构包含多个承载杆、多个转动杆、多个矩形块、限位组件和定位组件,所述转动杆与承载杆的中部固定穿插连接,所述矩形块固定于转动杆的一端,所述定位组件设置于限位组件的中部。
11、优选的,多个所述承载杆与物流车本体的内腔转动连接,所述转动杆的两端分别通过轴承与物流车本体内壁的两边侧转动穿插连接。
12、优选的,所述限位组件包含限位板、多个限位柱、多个限位槽、三个第一压缩弹簧和防撞垫,多个限位柱等距固定于限位板的一面,所述限位槽开设于限位柱的一端,所述矩形块与限位槽的内腔滑动穿插连接,三个所述第一压缩弹簧和防撞垫分别设置于限位板的两面。
13、优选的,三个所述第一压缩弹簧等距固定于限位板的一面,所述防撞垫固定于限位板的另一面,三个所述第一压缩弹簧套设于三个限位柱的外壁,所述第一压缩弹簧的一端固定于物流车本体的背面。
14、优选的,所述定位组件包含定位板、两个定位杆、两个外螺纹、两个第二压缩弹簧和两个转动块,所述定位板与限位板的中部固定穿插连接,两个所述定位杆分别与定位板的两端滑动穿插连接,所述外螺纹开设于定位杆的一端,所述第二压缩弹簧通过垫片设置于转动块的一端。
15、优选的,所述第二压缩弹簧的一端与定位板的外壁固定连接,所述定位杆的另一端与转动块的一端固定连接,所述外螺纹与物流车本体的背面螺纹穿插连接。
16、本发明的技术效果和优点:
17、(1)本发明利用物流车本体、控制系统组件、防护门机构和移动机构相配合的设置方式,通过控制系统组件,便于物流车本体的稳定移动,使其能对物品进行稳定运送,且便于物品从防护门机构运送至物流车本体的内腔,使其无需人工搬运,且便于物品在物流车本体内腔的移动或稳定放置;
18、(2)本发明利用限位组件和定位组件相配合的设置方式,通过限位柱上的限位槽,便于对矩形块进行位置限定,使其转动杆能进行位置限定,使其承载杆不会随意在物流车本体的内腔进行转动,使其物品在物流车本体的内腔不会随意发生滑动现象,通过定位杆端部外螺纹与物流车本体的连接,使其能对限位板进行位置限定,使其限位柱不会影响到转动杆的稳定转动,,便于物品能稳定在承载杆上进行移动,使其物品能在物流车本体的内腔进行位置移动。
技术特征:
1.一种无人物流车控制系统,包括:
2.根据权利要求1所述的一种无人物流车控制系统,其特征在于,所述控制系统组件(2)包含电源模块(21)、电子控制模块(22)、车身控制模块(23)、通信模块(24)和驱动模块(25),所述电源模块(21)、电子控制模块(22)、车身控制模块(23)、通信模块(24)和驱动模块(25)均固定嵌设于物流车本体(1)的一端。
3.根据权利要求1所述的一种无人物流车控制系统,其特征在于,所述防护门机构(7)包含固定门(71)、连接槽(72)、传送带(73)、两个转动轴(74)、伺服电机(75)、两个定位管(76)和两个卡槽(77),所述固定门(71)的底部通过两个定位管(76)与进料口(6)的底部转动连接,所述传送带(73)设置于连接槽(72)的内腔,两个所述转动轴(74)设置于传送带(73)内腔的两端,所述伺服电机(75)的输出端与其中一个转动轴(74)的一端传动连接,所述液压缸(8)的一端与卡槽(77)的内腔滑动穿插连接。
4.根据权利要求3所述的一种无人物流车控制系统,其特征在于,所述连接槽(72)开设于固定门(71)的一面,所述转动轴(74)的两端分别通过轴承与连接槽(72)内壁的两边侧转动穿插连接,其中一个所述转动轴(74)的两端分别通过轴承与进料口(6)底部的两边侧转动穿插连接,所述伺服电机(75)嵌设于物流车本体(1)的一端,两个所述定位管(76)分别固定于固定门(71)一端的两边侧,所述定位管(76)的一端通过轴承与进料口(6)的内壁转动穿插连接,两个所述卡槽(77)分别开设于固定门(71)另一端的两边侧。
5.根据权利要求1所述的一种无人物流车控制系统,其特征在于,所述移动机构(9)包含多个承载杆(91)、多个转动杆(92)、多个矩形块(93)、限位组件(94)和定位组件(95),所述转动杆(92)与承载杆(91)的中部固定穿插连接,所述矩形块(93)固定于转动杆(92)的一端,所述定位组件(95)设置于限位组件(94)的中部。
6.根据权利要求5所述的一种无人物流车控制系统,其特征在于,多个所述承载杆(91)与物流车本体(1)的内腔转动连接,所述转动杆(92)的两端分别通过轴承与物流车本体(1)内壁的两边侧转动穿插连接。
7.根据权利要求5所述的一种无人物流车控制系统,其特征在于,所述限位组件(94)包含限位板(941)、多个限位柱(942)、多个限位槽(943)、三个第一压缩弹簧(944)和防撞垫(945),多个限位柱(942)等距固定于限位板(941)的一面,所述限位槽(943)开设于限位柱(942)的一端,所述矩形块(93)与限位槽(943)的内腔滑动穿插连接,三个所述第一压缩弹簧(944)和防撞垫(945)分别设置于限位板(941)的两面。
8.根据权利要求7所述的一种无人物流车控制系统,其特征在于,三个所述第一压缩弹簧(944)等距固定于限位板(941)的一面,所述防撞垫(945)固定于限位板(941)的另一面,三个所述第一压缩弹簧(944)套设于三个限位柱(942)的外壁,所述第一压缩弹簧(944)的一端固定于物流车本体(1)的背面。
9.根据权利要求5所述的一种无人物流车控制系统,其特征在于,所述定位组件(95)包含定位板(951)、两个定位杆(952)、两个外螺纹(953)、两个第二压缩弹簧(954)和两个转动块(955),所述定位板(951)与限位板(941)的中部固定穿插连接,两个所述定位杆(952)分别与定位板(951)的两端滑动穿插连接,所述外螺纹(953)开设于定位杆(952)的一端,所述第二压缩弹簧(954)通过垫片设置于转动块(955)的一端。
10.根据权利要求9所述的一种无人物流车控制系统,其特征在于,所述第二压缩弹簧(954)的一端与定位板(951)的外壁固定连接,所述定位杆(952)的另一端与转动块(955)的一端固定连接,所述外螺纹(953)与物流车本体(1)的背面螺纹穿插连接。
技术总结
本发明公开了一种无人物流车控制系统,包括:物流车本体,用于运送物品:物流车本体的一端设置有控制系统组件,物流车本体的一端设置有摄像头,物流车本体一端的顶部设置有显示屏,物流车本体的顶部设置有太阳能板;物流车本体的一侧开设有进料口,进料口的内腔设置有防护门机构,进料口顶部的两边侧均嵌设有液压缸;物流车本体的内腔设置有用于物品放置的移动机构。本发明利用物流车本体、控制系统组件、防护门机构和移动机构相配合的设置方式,便于物流车本体的稳定移动,使其能对物品进行稳定运送,且便于物品从防护门机构运送至物流车本体的内腔,使其无需人工搬运,且便于物品在物流车本体内腔的移动或稳定放置。
技术研发人员:李大琳,彭岗举,彭举彬,陈静纯,蓝金兰
受保护的技术使用者:珠海市格努科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!