智能辅助驾驶车辆驾驶员反应时间评估方法及系统与流程
本发明涉及智能驾驶,具体是涉及一种智能辅助驾驶车辆驾驶员反应时间评估方法及系统。
背景技术:
1、先进驾驶辅助系统(advanced driver assistance systems,adas)已经成为智能汽车的智能化直接体现。在adas的纵向辅助功能中,预警灵敏度直接影响了驾驶员的功能体验,警报虚报是用户反馈较多的一个问题。在前向碰撞预警(forward collisionwarning,fcw)、紧急转向辅助(emergency steering assist,esa)、自动紧急制动系统(automatic emergency braking,aeb)等功能中,预警阈值大会增加预警频率和虚警率,给驾驶员造成心理压力,而阈值较低的预警则无法预留足够驾驶员反应时间,增加了碰撞风险。如何在安全和用户体验之间取得折衷就显得尤为重要。
2、驾驶员反应时间计算方法主要有以下几类:
3、a)利用脑电信号计算驾驶员反应时间,然后用神经网络或者回归模型,评估驾驶员的疲劳程度或者警觉性,根据不同疲劳程度确定驾驶员反应时间;
4、b)利用眼动仪检测驾驶员眼部,或者利用高速红外摄像头检测驾驶员的微表情,从驾驶员的面部判断驾驶员的状态,从而确定驾驶员反应时间;
5、c)通过检测车辆的物理信息来决定驾驶员反应时间,如踏板位置、转向角度、制动强度、油门开度等车辆驾驶信息,然后利用网络模型或者模糊控制等方法,对驾驶员风格进行分类,确定不同类别的驾驶员反应时间;
6、d)通过周车或者环境的信息来确定驾驶员反应时间。例如采用跟车距离,横纵向相对车速,相对加速度,碰撞时间,安全距离等来确定车辆在交通中的运行趋势,来进一步确定驾驶员反应时间。
7、上述方案,在单一条件下能实时调整驾驶员反应时间,但条件的满足往往较宽泛,不够精确,无法适应复杂多变的场景,在灵活性和工程实现上都存在一定的不足;现有方法主要针对于自车油门踏板方向盘等物理信号,或者针对于跟车场景,而没有将环境道路等信息考虑在内。城市工况和拥堵工况是较容易产生误警告的一个场景,应将城市工况纳入驾驶员反应时间计算工况,但是城市工况的特征难以区分,在检测时较为模糊;考虑到车辆的实现情况,应尽量少地占用设备资源和算力资源,同时不应过度降低驾驶员驾驶舒适性,保证成本前提下尽可能使用已有设备。
技术实现思路
1、本发明的目的是为了克服上述背景技术的不足,提供一种智能辅助驾驶车辆驾驶员反应时间评估方法及系统。
2、第一方面,本技术提供了一种智能辅助驾驶车辆驾驶员反应时间评估方法,包括以下步骤:
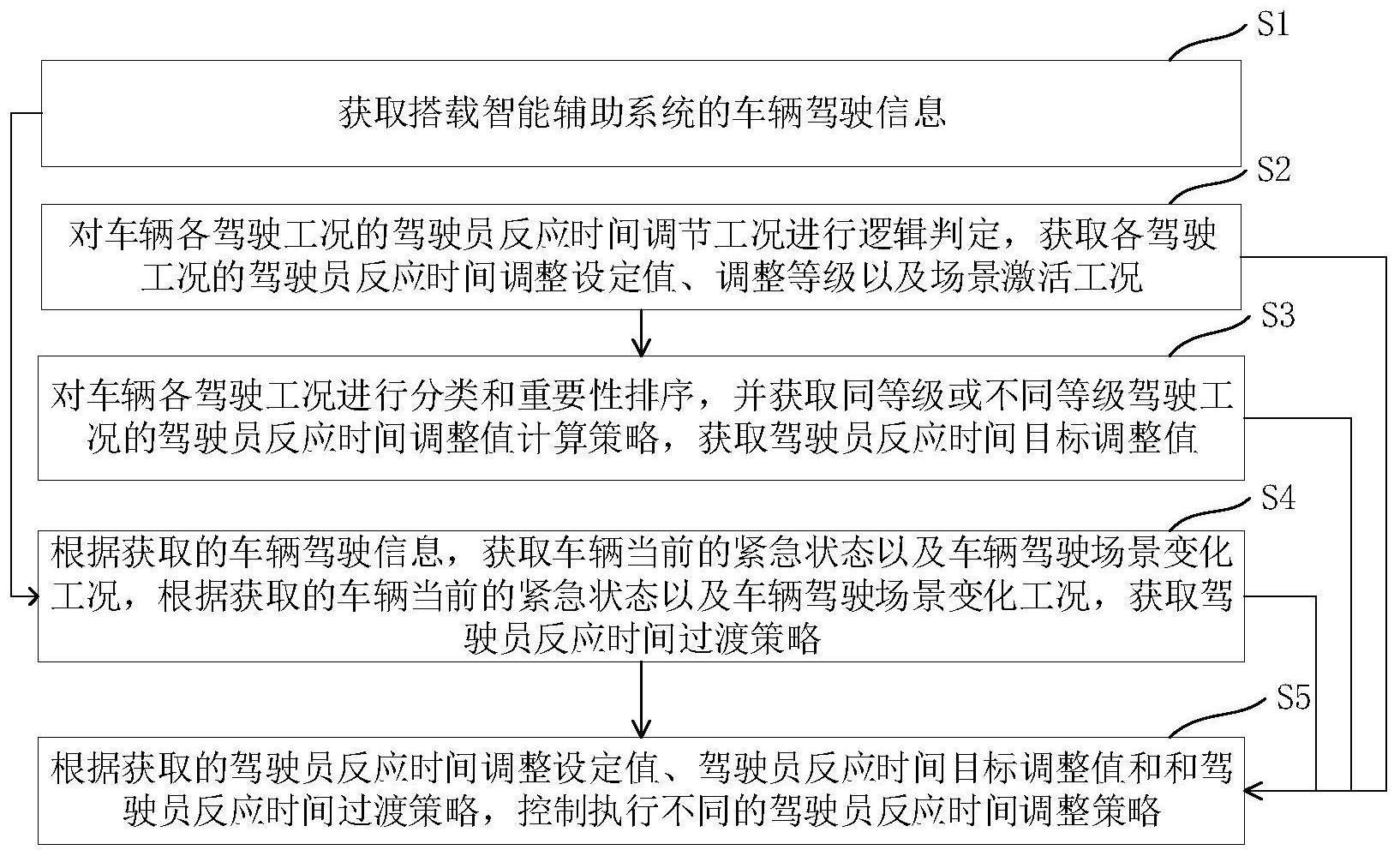
3、获取搭载智能辅助系统的车辆驾驶信息;
4、对车辆各驾驶工况的驾驶员反应时间调节工况进行逻辑判定,获取各驾驶工况的驾驶员反应时间调整设定值、调整等级以及场景激活工况;
5、对车辆各驾驶工况进行分类和重要性排序,并获取同等级或不同等级驾驶工况的驾驶员反应时间调整值计算策略,获取驾驶员反应时间目标调整值;
6、根据获取的车辆驾驶信息,获取车辆当前的紧急状态以及车辆驾驶场景变化工况,根据获取的车辆当前的紧急状态以及车辆驾驶场景变化工况,获取驾驶员反应时间过渡策略;
7、根据获取的驾驶员反应时间调整设定值、驾驶员反应时间目标调整值和和驾驶员反应时间过渡策略,控制执行不同的驾驶员反应时间调整策略。
8、根据第一方面,在第一方面的第一种可能的实现方式中,所述“获取搭载智能辅助系统的车辆驾驶信息”步骤,具体包括以下步骤:
9、获取车辆预警系统启动工况;
10、当车辆预警系统启动时,获取搭载智能辅助系统的车辆驾驶信息。
11、根据第一方面的第一种可能的实现方式,在第一方面的第二种可能的实现方式中,所述“当车辆预警系统启动时,获取搭载智能辅助系统的车辆驾驶信息”步骤,具体包括以下步骤:
12、当车辆预警系统启动时,获取搭载智能辅助系统的车辆驾驶信号;
13、将获取的车辆驾驶信号进行滤波,获取滤波后的车辆驾驶信息。
14、根据第一方面,在第一方面的第三种可能的实现方式中,所述“对车辆各驾驶工况进行分类和重要性排序,并获取同等级或不同等级驾驶工况的驾驶员反应时间调整值计算策略,获取驾驶员反应时间目标调整值”步骤,具体包括以下步骤:
15、对车辆各驾驶工况进行分类和重要性排序;
16、对同调整等级内的车辆驾驶工况的反应调整值直接取小处理获得;
17、对不同调整等级之间的车辆驾驶工况的驾驶员反应时间调整值根据预设调整策略进行取小处理获得。
18、根据第一方面,在第一方面的第四种可能的实现方式中,所述调整等级分为五级,所述“不同调整等级之间的车辆驾驶工况的驾驶员反应时间调整值根据预设调整策略进行取小处理获得”步骤,具体包括以下步骤:
19、获取第五级调整等级的驾驶员反应时间调整值,作为第一参数值;
20、获取第二级调整等级的驾驶员反应时间调整值和第四级调整等级的驾驶员反应时间调整值之和,作为第二参数值;
21、获取第二级调整等级的驾驶员反应时间调整值和第一级调整等级的驾驶员反应时间调整值的最大值和第三级调整等级的驾驶员反应时间调整值之和,作为第三参数值;
22、取第一参数值、第二参数值和第三参数值中的最小值,作为不同调整等级之间的车辆驾驶工况的驾驶员反应时间目标调整值。
23、根据第一方面,在第一方面的第五种可能的实现方式中,所述“根据获取的车辆驾驶信息,获取车辆当前的紧急状态以及车辆驾驶场景变化工况,根据获取的车辆当前的紧急状态以及车辆驾驶场景变化工况,获取驾驶员反应时间过渡策略”步骤,具体包括以下步骤:
24、根据获取的车辆驾驶信息,获取车辆当前的紧急状态以及车辆驾驶场景变化工况;
25、当车辆当前状态为紧急状态时,控制执行直接恢复成冗余度最高的基准值的驾驶员反应时间;
26、当车辆当前状态为非紧急状态时,控制执行驾驶员反应时间平滑过渡策略。
27、根据第一方面的第五种可能的实现方式,在第一方面的第六种可能的实现方式中,所述“当车辆当前状态为非紧急状态时,控制执行驾驶员反应时间平滑过渡策略”步骤,具体包括以下步骤:
28、当车辆当前状态为非紧急状态时,并且驾驶员反应时间变化率大于0时,控制驾驶员反应时间按调整值变化率斜坡降低至0的方法,调整至驾驶员反应时间目标调整值;
29、当车辆当前状态为非紧急状态时,并且驾驶员反应时间变化率小于于0时,控制驾驶员反应时间按调整值变化率斜坡增加至0的方法,调整至驾驶员反应时间目标调整值。
30、第二方面,本技术提交一种智能辅助驾驶车辆驾驶员反应时间评估系统,其特征在于,包括:
31、车辆驾驶信息获取模块,用于获取搭载智能辅助系统的车辆驾驶信息;
32、反应时间调整设定值获取模块,用于对车辆各驾驶工况的驾驶员反应时间调节工况进行逻辑判定,获取各驾驶工况的驾驶员反应时间调整设定值、调整等级以及场景激活工况;
33、反应时间目标调整值获取模块,与所述反应时间调整设定值获取模块通信连接,用于对车辆各驾驶工况进行分类和重要性排序,并获取同等级或不同等级驾驶工况的驾驶员反应时间调整值计算策略,获取驾驶员反应时间目标调整值;
34、过渡策略获取模块,与所述车辆驾驶信息获取模块和所述反应时间调整设定值获取模块通信连接,用于根据获取的车辆驾驶信息、各驾驶工况的驾驶员反应时间调整设定值、调整等级以及场景激活工况获取车辆当前的紧急状态以及车辆驾驶场景变化工况,根据获取的车辆当前的紧急状态以及车辆驾驶场景变化工况,获取驾驶员反应时间过渡策略;
35、调整策略获取模块,与所述反应时间调整设定值获取模块、所述反应时间目标调整值获取模块以及所述过渡策略获取模块通信连接,用于根据获取的驾驶员反应时间调整设定值、驾驶员反应时间目标调整值和和驾驶员反应时间过渡策略,控制执行不同的驾驶员反应时间调整策略。
36、根据第二方面,在第二方面的第一种可能的实现方式中,所述反应时间目标调整值获取模块包括:
37、分类排序单元,用于对车辆驾驶工况进行分类和重要性排序;
38、第一目标调整值获取单元,与所述分类排序单元和所述反应时间调整设定值获取模块通信连接,用于对同调整等级内的车辆驾驶工况的反应调整值直接取小处理获得;
39、第二目标调整值获取单元,与所述分类排序单元和所述反应时间调整设定值获取模块通信连接,用于对不同调整等级之间的车辆驾驶工况的驾驶员反应时间调整值根据预设调整策略进行取消处理获取。
40、根据第二方面,在第二方面的第二种可能的实现方式中,所述过渡策略获取模块包括:
41、车辆状态和场景变化工况获取单元,与所述车辆驾驶信息获取模块和所述反应时间调整设定值获取模块通信连接,用于根据获取的车辆驾驶信息、各驾驶工况的驾驶员反应时间调整设定值、调整等级以及场景激活工况获取车辆当前的紧急状以及车辆驾驶场景变化工况;
42、第一调整策略获取单元,与所述车辆状态和场景变化工况获取单元通信连接,用于当车辆当前状态为紧急状态时,控制执行直接恢复成冗余度最高的基准值的驾驶员反应时间;
43、第二调整策略获取单元,与所述车辆状态和场景变化工况获取单元通信连接,用于当车辆当前状态为非紧急状态时,控制执行驾驶员反应时间平滑过渡策略。
44、与现有技术相比,本发明的优点如下:
45、本技术提供的智能辅助驾驶车辆驾驶员反应时间评估方法,通过获取车辆驾驶信息、不同车辆驾驶工况的驾驶员反应时间的逻辑分析设定,不同的车辆驾驶工况设定不同的驾驶员反应时间调整值,避免车辆驾驶过程中出现的误警问题的出现;
46、获取不同驾驶场景下的驾驶员反应时间调整策略,能够适应复杂多变的驾驶情景,根据车辆搭载的l2智能辅助系统,对检测场景进行加减,方便进行定制化改变,具有灵活性高的特点;
47、通过分级解决不同调整等级的驾驶工况之间的耦合作用,实现驾驶员反应时间平滑调整过渡,不影响驾驶舒适性,并保留应急场景的瞬间响应,以优先保证驾驶安全性;
48、不用增加额外的通信设备,具有实现成本低的特点。
- 还没有人留言评论。精彩留言会获得点赞!