车辆换道决策方法、装置、电子设备和存储介质与流程
本公开涉及自动驾驶,尤其涉及一种车辆换道决策方法、装置、电子设备和存储介质。
背景技术:
1、随着无人驾驶技术应用于更加广泛和复杂道路环境,传统的基于规则或知识推理的换道决策算法,难以覆盖大范围的场景,也难以满足在不同场景下,人类对无人驾驶车辆换道行为不同的期望。而基于强化学习或数据驱动的深度学习方法,又缺乏工程上的可靠性,同时依赖大量的人类优质的驾驶数据,在工程上难以稳定应用,因此,本发明提供了一种环境场景与换道总效用相关联的车辆换道决策方法,解决了传统换道决策方法无法匹配多场景以及复杂场景下规则冲突或换道算法难以覆盖的问题。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本公开实施例提供了一种车辆换道决策方法、装置、电子设备和存储介质,解决了复杂场景下规则冲突或算法难以覆盖的问题,设计了预设影响因素的换道编码的编码组合关联环境场景的方案,高效地体现不同场景对换道决策行为的期望,易于扩展和定制化开发。
2、第一方面,本公开实施例提供了一种车辆换道决策方法,该方法包括:
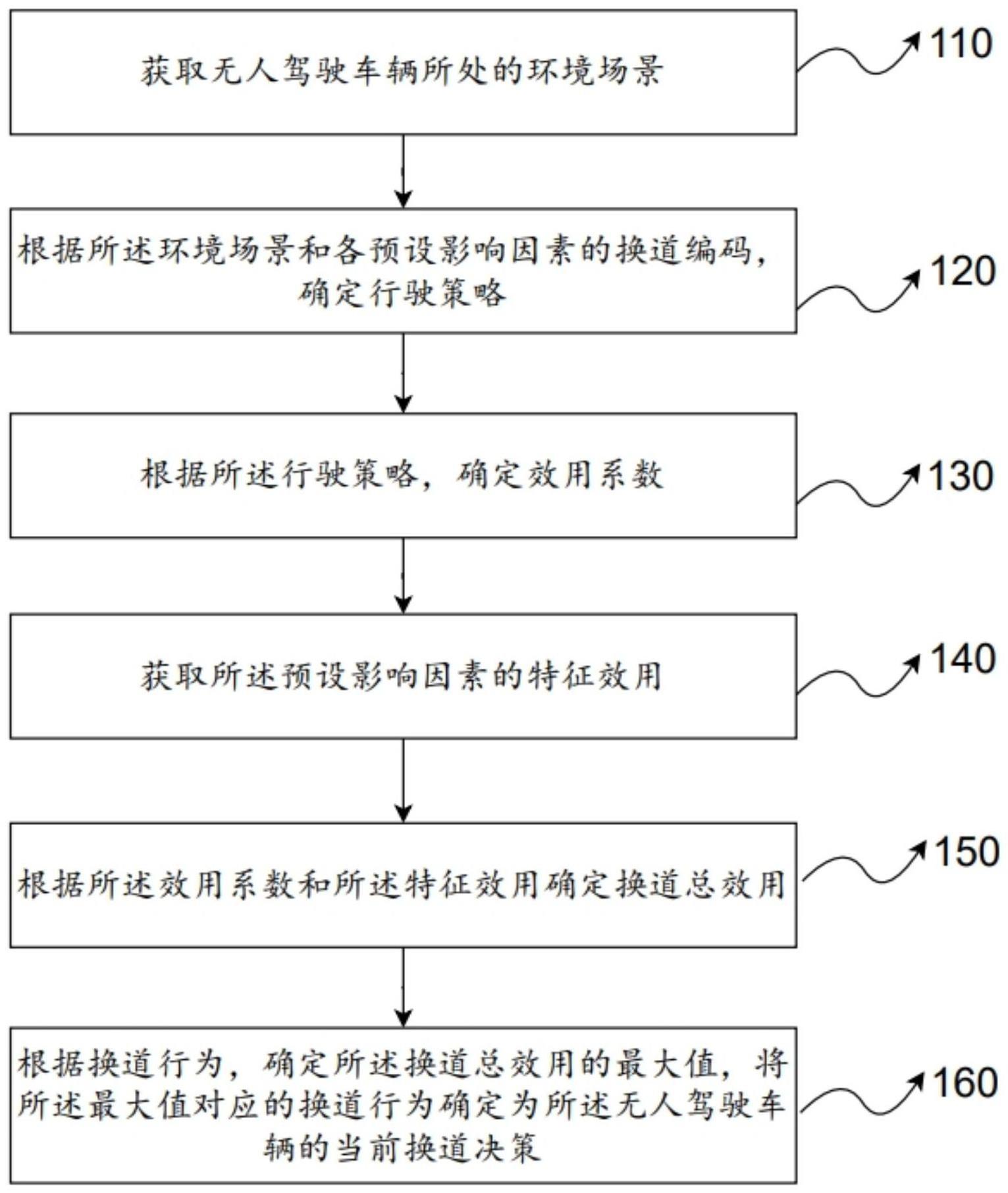
3、获取无人驾驶车辆所处的环境场景;
4、根据所述环境场景和各预设影响因素的换道编码,确定行驶策略;
5、根据所述行驶策略,确定效用系数;
6、获取所述预设影响因素的特征效用;
7、根据所述效用系数和所述特征效用确定换道总效用;
8、根据换道行为,确定所述换道总效用的最大值,将所述最大值对应的换道行为确定为所述无人驾驶车辆的当前换道决策。
9、第二方面,本公开实施例还提供了一种车辆换道决策装置,该装置包括:
10、第一获取模块,用于获取无人驾驶车辆所处的环境场景;
11、第一确定模块,用于根据所述环境场景和各预设影响因素的换道编码,确定行驶策略;
12、第二确定模块,用于根据所述行驶策略,确定效用系数;
13、第二获取模块,用于获取所述预设影响因素的特征效用;
14、第三确定模块,用于根据所述效用系数和所述特征效用确定换道总效用;
15、第四确定模块,用于根据换道行为,确定所述换道总效用的最大值,将所述最大值对应的换道行为确定为所述无人驾驶车辆的当前换道决策。
16、第三方面,本公开实施例还提供了一种电子设备,所述电子设备包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上所述的车辆换道决策方法。
17、第四方面,本公开实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上所述的车辆换道决策方法。
18、本公开实施例提供的一种车辆换道决策方法,获取无人驾驶车辆所处的环境场景;根据环境场景和各预设影响因素的换道编码,确定行驶策略;根据行驶策略,确定效用系数;获取预设影响因素的特征效用;根据效用系数和特征效用确定换道总效用;根据换道行为,确定换道总效用的最大值,将最大值对应的换道行为确定为无人驾驶车辆的当前换道决策,本公开技术方案解决了复杂场景下规则冲突或算法难以覆盖的问题,设计了预设影响因素的换道编码的编码组合关联环境场景的方案,高效地体现不同场景对换道决策行为的期望,易于扩展和定制化开发。
技术特征:
1.一种车辆换道决策方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据所述环境场景和各预设影响因素的换道编码,确定行驶策略,包括:
3.根据权利要求1所述的方法,其特征在于,所述预设影响因素为安全性因素、通行性因素、规则因素、继续路线因素或行驶因素;
4.根据权利要求3所述的方法,其特征在于,根据所述环境场景对各预设影响因素的换道编码进行组合,确定行驶策略,包括:
5.根据权利要求3所述的方法,其特征在于,获取所述预设影响因素的特征效用,包括:
6.根据权利要求3所述的方法,其特征在于,所述根据所述效用系数和特征效用确定换道总效用,包括:
7.根据权利要求1所述的方法,其特征在于,所述换道行为包括保持当前车道、向右换道或向左换道,根据换道行为,确定所述换道总效用的最大值,将所述最大值对应的换道行为确定为所述无人驾驶车辆的当前换道决策,包括:
8.一种车辆换道决策装置,其特征在于,该装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本公开实施例公开了一种车辆换道决策方法、装置、电子设备和存储介质,该方法包括:获取无人驾驶车辆所处的环境场景;根据环境场景和各预设影响因素的换道编码,确定行驶策略;根据所述行驶策略,确定效用系数;获取预设影响因素的特征效用;根据效用系数和特征效用确定换道总效用;根据换道行为,确定换道总效用的最大值,将所述最大值对应的换道行为确定为无人驾驶车辆的当前换道决策。本公开实施例的车辆换道决策解决了复杂场景下规则冲突或算法难以覆盖的问题,设计了预设影响因素的换道编码的编码组合关联环境场景的方案,高效地体现不同场景对换道决策行为的期望,易于扩展和定制化开发。
技术研发人员:蔡祺生
受保护的技术使用者:驭势科技(北京)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!