车辆制动力的补偿方法、装置、计算机设备、存储介质与流程
本公开涉及车辆控制,特别是涉及一种车辆制动力的补偿方法、装置、计算机设备、存储介质。
背景技术:
1、随着制动系统线控化的发展,当前市场上越来越多的车型采用集成式制动控制器。当集成式制动控制器助力失效时,制动踏板会变硬,驾驶员需要使用比平常更大的踏板力才能得到相同的整车制动效果。一方面会造成驾驶员的制动恐慌,另一方面,当遇到紧急制动的情况时,由于驾驶员踩下的踏板力不足,车辆存在碰撞的风险。
2、对于没有装备备份制动单元的车辆(即只装备了集成式制动控制器的车辆),目前并不能识别出不同场景下的驾驶情况,以针对性的对车辆的制动力进行补偿。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种可以针对性的对车辆的制动力进行补偿的车辆制动力的补偿方法、装置、计算机设备、存储介质。
2、第一方面,本公开提供了一种车辆制动力的补偿方法。所述方法包括:
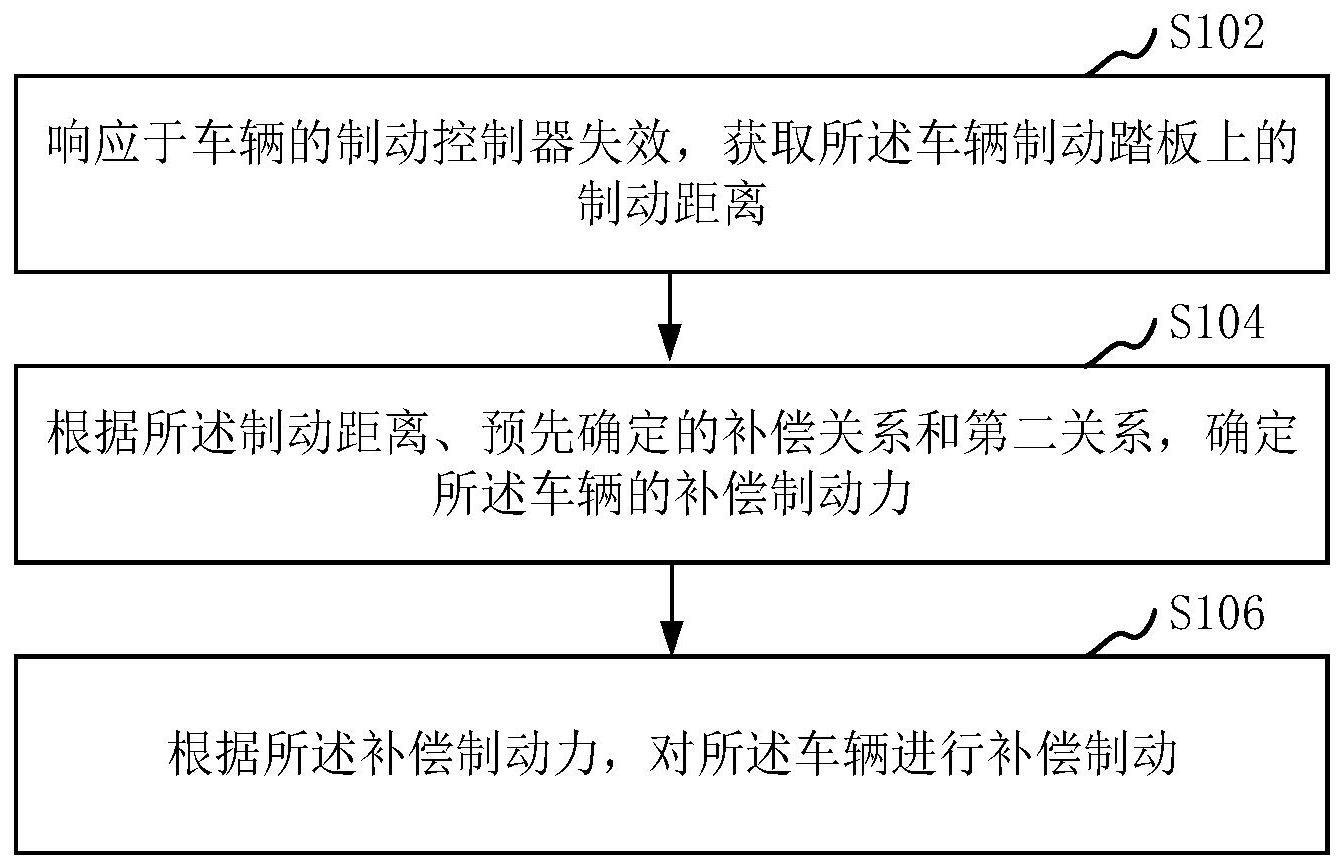
3、响应于车辆的制动控制器失效,获取所述车辆制动踏板上的制动距离;
4、根据所述制动距离、预先确定的补偿关系和第二关系,确定所述车辆的补偿制动力;其中,所述补偿关系是根据第一关系和所述第二关系确定的;所述第一关系包括:所述制动控制器正常工作时所述车辆制动踏板的制动距离和减速度之间的关系,所述第二关系包括:所述制动控制器失效时所述车辆制动踏板的制动距离和减速度之间的关系;
5、根据所述补偿制动力,对所述车辆进行补偿制动。
6、在其中一个实施例中,所述补偿关系的确定过程进一步包括:
7、获取所述第一关系和所述第二关系;
8、根据所述第一关系、预设的第一阈值和所述第二关系,确定所述补偿关系,其中,所述补偿关系位于所述第一关系和所述第二关系之间,且与所述第一关系和/或所述第二关系之间的偏差值等于第一阈值,所述补偿关系包括:所述制动控制器失效时,制动力补偿后所述车辆制动踏板的制动距离和减速度之间的关系。
9、在其中一个实施例中,所述根据所述制动距离、预先确定的补偿关系和第二关系,确定所述车辆的补偿制动力,包括:
10、根据所述制动距离和预先确定的补偿关系,确定所述车辆的目标减速度;
11、根据所述制动距离和所述第二关系,确定所述制动控制器失效时所述车辆的失效减速度;
12、根据所述目标减速度和所述失效减速度,确定所述车辆的补偿减速度;
13、根据所述补偿减速度,确定所述车辆的补偿制动力。
14、在其中一个实施例中,所述根据所述补偿制动力,对所述车辆进行补偿制动,包括下述中的一种:
15、根据所述补偿制动力对所述车辆的前轴进行补偿制动;
16、根据所述补偿制动力,对所述车辆的前轴和后轴进行补偿制动。
17、在其中一个实施例中,所述根据所述补偿制动力对所述车辆的前轴进行补偿制动,包括:
18、响应于所述补偿制动力小于等于所述车辆的前轴的最大制动力,根据所述补偿制动力,对所述车辆的前轴进行补偿制动。
19、在其中一个实施例中,所述根据所述补偿制动力,对所述车辆进行制动之后,所述方法还包括:
20、计算所述车辆的前轴滑移率,响应于所述前轴滑移率大于预设的滑移率阈值,降低所述补偿制动力;
21、根据降低后的所述补偿制动力,对所述车辆的前轴进行补偿制动,直至所述前轴滑移率小于等于预设的滑移率阈值。
22、在其中一个实施例中,所述根据所述补偿制动力,对所述车辆的前轴和后轴进行制动,包括:
23、响应于所述补偿制动力大于所述车辆的前轴的最大制动力,根据所述最大制动力,对所述车辆的前轴进行补偿制动;
24、根据所述补偿制动力和所述车辆的前轴的最大制动力,确定所述车辆的后轴的目标制动力;
25、根据所述目标制动力,对所述车辆的后轴进行补偿制动。
26、在其中一个实施例中,所述根据所述补偿制动力,对所述车辆进行制动之后,所述方法还包括:
27、计算所述车辆的前轴滑移率和后轴滑移率;
28、响应于所述前轴滑移率大于预设的滑移率阈值,降低所述前轴的最大制动力;
29、根据降低后的所述前轴的最大制动力,对所述车辆的前轴进行补偿制动,直至所述前轴滑移率小于等于预设的滑移率阈值;
30、响应于所述后轴滑移率大于预设的滑移率阈值,降低所述目标制动力;
31、根据降低后的所述目标制动力,对所述车辆的后轴进行补偿制动,直至所述后轴滑移率小于等于预设的滑移率阈值。
32、第二方面,本公开还提供了一种车辆制动力的补偿装置。所述装置包括:
33、制动距离获取模块,用于响应于车辆的制动控制器失效,获取所述车辆制动踏板上的制动距离;
34、补偿制动力确定模块,用于根据所述制动距离、预先确定的补偿关系和第二关系,确定所述车辆的补偿制动力;其中,所述补偿关系是根据第一关系和所述第二关系确定的;所述第一关系包括:所述制动控制器正常工作时所述车辆制动踏板的制动距离和减速度之间的关系,所述第二关系包括:所述制动控制器失效时所述车辆制动踏板的制动距离和减速度之间的关系;
35、补偿制动模块,用于根据所述补偿制动力,对所述车辆进行补偿制动。
36、第三方面,本公开还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任一方法实施例的步骤。
37、第四方面,本公开还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一方法实施例的步骤。
38、第五方面,本公开还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述任一方法实施例的步骤。
39、上述各实施例中,在车辆的制动控制器失效可以获取当前驾驶员对车辆制动踏板的制动距离。进而可以根据所述制动距离、预先确定的补偿关系和所述制动控制器失效时所述车辆制动踏板的制动距离和减速度之间的第二关系,确定所述车辆的补偿制动力。根据所述补偿制动力,对所述车辆进行制动。使用第二关系和预先确定的补偿关系来确定最终的补偿制动力,能够使驾驶员意识到当前车辆制动控制器失效,并且还能够对车辆产生一定的补偿制动效果,保证车辆行驶过程中的安全性。可以根据车辆制动踏板上不同的制动距离来动态的对补偿制动力进行调整,能够针对性的对车辆的制动力进行补偿。
技术特征:
1.一种车辆制动力的补偿方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述补偿关系的确定过程进一步包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述制动距离、预先确定的补偿关系和第二关系,确定所述车辆的补偿制动力,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述补偿制动力,对所述车辆进行补偿制动,包括下述中的一种:
5.根据权利要求4所述的方法,其特征在于,所述根据所述补偿制动力对所述车辆的前轴进行补偿制动,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述补偿制动力,对所述车辆进行制动之后,所述方法还包括:
7.一种车辆制动力的补偿装置,其特征在于,所述装置包括:
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本公开涉及一种车辆制动力的补偿方法、装置、计算机设备、存储介质和计算机程序产品。所述方法包括:响应于车辆的制动控制器失效,获取所述车辆制动踏板上的制动距离;根据所述制动距离、预先确定的补偿关系和所述制动控制器失效时所述车辆制动踏板的制动距离和减速度之间的第二关系,确定所述车辆的补偿制动力,其中,所述补偿关系是根据所述制动控制器正常工作时所述车辆制动踏板的制动距离和减速度之间的第一关系和所述第二关系确定的;根据所述补偿制动力,对所述车辆进行补偿制动。采用本方法能够针对性的对车辆的制动力进行补偿。
技术研发人员:王乐俊,肖柏宏,原达,张宪会,王志超,杨千浅,谭智慧,黄李冲
受保护的技术使用者:蔚来汽车科技(安徽)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!