煤矿井下巡检机器人的换电方法、装置、系统及控制模块与流程
本技术属于煤矿安全,尤其涉及一种煤矿井下巡检机器人的换电方法、装置、系统及控制模块。
背景技术:
1、煤矿机器人是构建智能煤矿的重要组成部分,是提升煤矿智能装备水平的重要体现,是实现煤矿“少人、无人”的有效支撑。随着国家相关行业主管部门的不断推动,以及煤炭生产企业的高度重视,以巡检机器人为代表的各类机器人已成井下智能化建设的重要装备。目前已经下井的防爆巡检机器人根据动力源的不同,主要有锂电池供电、钢丝绳牵引两种方式。钢丝绳牵引机器人由于外部装置需求高、工程施工难度大、使用场所受限等问题,应用较少,因此井下防爆巡检机器人大多采用锂电池作为动力来源。《煤矿安全规程》对使用蓄电池设备的充电场所有明确的要求:机车等移动设备在专用充电硐室或者地面充电;监控、通信、避险等设备的备用电源可以就地充电,并有防过充等保护措施。规程相关要求不适合于井下巡检机器人,巡检机器人井下充电缺乏依据。
2、锂电池属于高能化学电池,当误用滥用或者生产制造存在自身缺陷,有出现泄压、着火,甚至爆炸的可能性。据统计,超过80%以上的电动车着火安全事故都发生在充电环节。煤矿井下为具有瓦斯煤尘潜在性爆炸危险的特殊环境,目前机器人井下有线、无线充电方式均存在防爆安全难以保障、充电过程安全保护控制不可靠等多方面问题,解决井下机器人的充电难题已经迫在眉睫。
3、无线充电利用电磁场或电磁波实现电能非接触传输,依据gb/t3836.1《爆炸性环境第5部分:设备通用要求》标准中的电磁能功率阈值要求,煤矿井下9k~60ghz的射频电磁波阈功率不得超过6w,煤矿井下防爆无线充电功率受限,无法对机器人实现高效充电。国内相关企业将无线充电装备置于隔爆腔内,机器人进入隔爆腔内进行无线充电,用以突破标准中对电磁能功率阈值的限制。
4、上述无线充电方案在煤矿复杂环境中应用,隔爆充电腔内容易进入煤粉等异物,造成无线充电装置失效,无法实现换电和自动充电。
技术实现思路
1、本技术的实施例提供了一种煤矿井下巡检机器人的换电方法、装置、系统及控制模块,进而能够减少因煤粉等异物造成无线充电装置失效,实现煤矿井下巡检机器人的换电和自动充电。
2、本技术的其它特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
3、根据本技术实施例的第一方面,提供了一种煤矿井下巡检机器人的换电方法,应用于煤矿井下巡检机器人的换电装置,所述换电装置包括:第一正压腔、第一正压腔门、第二正压腔、第二正压腔门、第一进气阀、第一出气阀、第一甲烷浓度传感器、第一压力传感器、换电模块、无线充电发射模块、满充储备电源、吹扫模块和控制模块,所述第一进气阀、第一出气阀、第一甲烷浓度传感器、第一压力传感器、换电模块均设置于所述第一正压腔内,所述无线充电发射模块和所述满充储备电源均设置于所述第二正压腔内,所述换电方法包括:
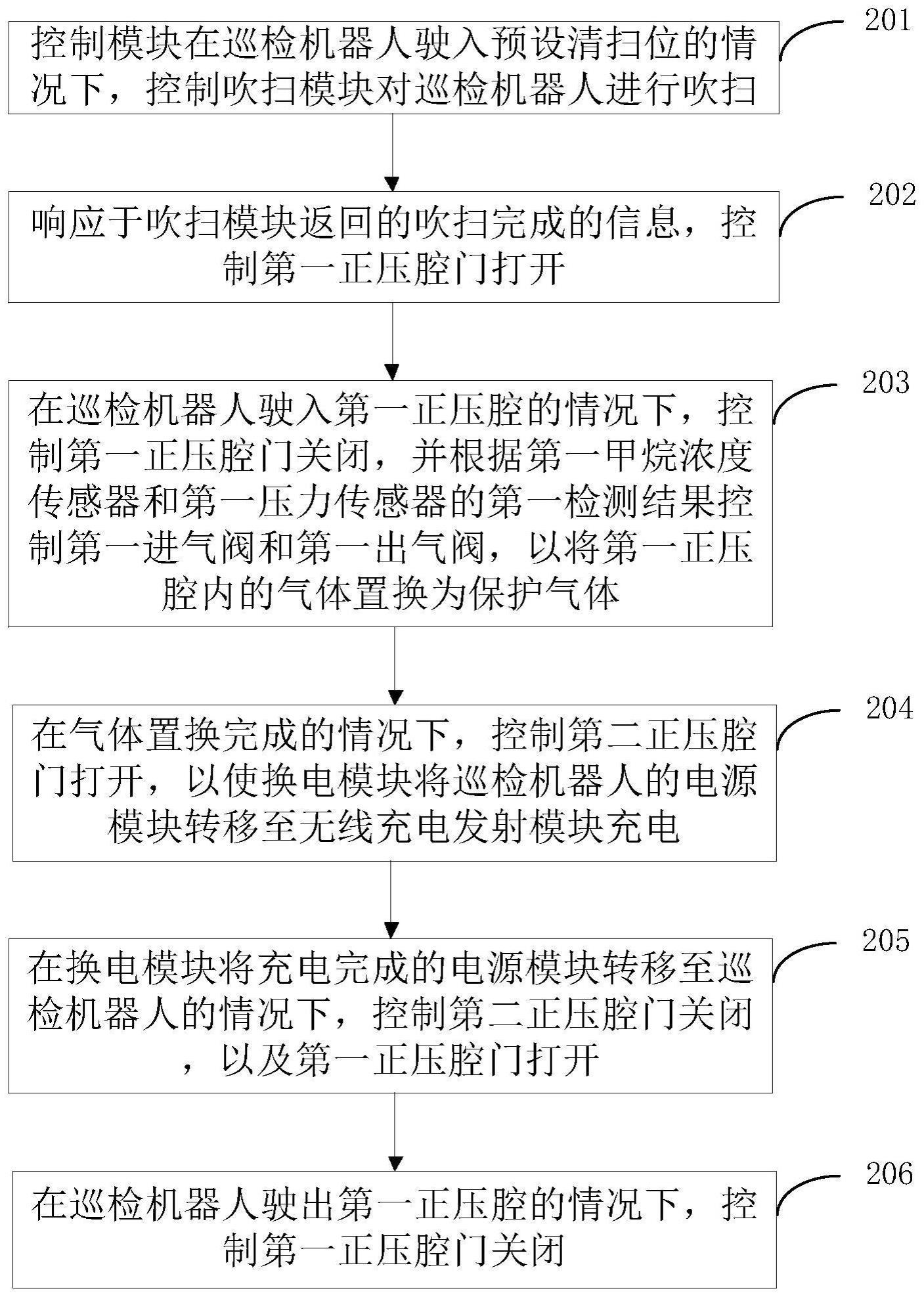
4、所述控制模块在巡检机器人驶入预设清扫位的情况下,控制所述吹扫模块对所述巡检机器人进行吹扫;
5、响应于所述吹扫模块返回的吹扫完成的信息,控制所述第一正压腔门打开;
6、在所述巡检机器人驶入所述第一正压腔的情况下,控制所述第一正压腔门关闭,并根据所述第一甲烷浓度传感器和所述第一压力传感器的第一检测结果控制所述第一进气阀和所述第一出气阀,以将所述第一正压腔内的气体置换为保护气体;
7、在气体置换完成的情况下,控制所述第二正压腔门打开,以使所述换电模块将所述巡检机器人的电源模块转移至所述无线充电发射模块充电;
8、在所述换电模块将所述满充储备电源转移至所述巡检机器人的情况下,控制所述第二正压腔门关闭,以及所述第一正压腔门打开;
9、在所述巡检机器人驶出所述第一正压腔的情况下,控制所述第一正压腔门关闭。
10、在本技术的一些实施例中,基于前述方案,所述根据所述第一甲烷浓度传感器和所述第一压力传感器的第一检测结果控制所述第一进气阀和所述第一出气阀,包括:
11、控制所述第一进气阀和所述第一出气阀打开;
12、获取所述第一检测结果;
13、在所述第一检测结果达到预设条件的情况下,控制所述第一进气阀和所述第一出气阀关闭。
14、在本技术的一些实施例中,基于前述方案,所述第一检测结果包括第一浓度和第一压力,所述预设条件为所述第一浓度小于0.1%,所述第一压力为高于外界大气压50pa至100pa。
15、在本技术的一些实施例中,基于前述方案,所述换电方法还包括:
16、在所述第一浓度大于0.1%或所述第一压力高于外界大气压100pa的情况下,控制所述煤矿井下巡检机器人的换电装置停机。
17、在本技术的一些实施例中,基于前述方案,所述换电装置还包括:均设置于所述第二正压腔内的第二进气阀、第二出气阀、第二甲烷浓度传感器和第二压力传感器,所述换电方法还包括:
18、在所述巡检机器人第一次驶入所述第一正压腔的情况下,根据所述第二甲烷浓度传感器和所述第二压力传感器的第二检测结果控制所述第二进气阀和所述第二出气阀,以将所述第二正压腔内的气体置换为保护气体。
19、在本技术的一些实施例中,基于前述方案,所述根据所述第二甲烷浓度传感器和所述第二压力传感器的第二检测结果控制所述第二进气阀和所述第二出气阀,包括:
20、控制所述第二进气阀和所述第二出气阀打开;
21、获取所述第二检测结果;
22、在所述第二检测结果达到预设条件的情况下,控制所述第二进气阀和所述第二出气阀关闭。
23、在本技术的一些实施例中,基于前述方案,所述换电装置还包括:灭火模块,所述换电方法还包括:
24、响应于所述电源模块发送的热失控信息,控制所述无线充电模块停止充电,并控制所述灭火模块开启。
25、根据本技术实施例的第二方面,提供了一种控制模块,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的方法的步骤。
26、根据本技术实施例的第三方面,提供了一种煤矿井下巡检机器人的换电装置,所述换电装置包括:壳体、第一正压腔、第一正压腔门、第二正压腔、第二正压腔门、第一进气阀、第一出气阀、第一甲烷浓度传感器、第一压力传感器、换电模块、无线充电发射模块、满充储备电源、第二进气阀、第二出气阀、第二甲烷浓度传感器、第二压力传感器、吹扫模块和根据权利要求8所述的控制模块,其中,
27、所述吹扫模块,在所述壳体外且靠近所述第一正压腔门的一侧设置;
28、所述第一正压腔门设置于所述壳体上,所述第一正压腔和所述第二正压腔通过所述第二正压腔门隔开,所述第一正压腔内设置有所述第一进气阀、所述第一出气阀、所述第一甲烷浓度传感器、所述第一压力传感器和所述换电模块;
29、所述第二正压腔内设置有所述第二进气阀、所述第二出气阀、所述第二甲烷浓度传感器、所述第二压力传感器、所述无线充电发射模块和所述满充储备电源。
30、根据本技术实施例的第四方面,提供了一种煤矿井下巡检机器人的换电系统,所述换电系统包括:
31、巡检机器人,内置有电源模块;以及
32、上述的煤矿井下巡检机器人的换电装置。
33、在本技术中,通过控制模块在巡检机器人驶入预设清扫位的情况下,控制所述吹扫模块对所述巡检机器人进行吹扫;响应于所述吹扫模块返回的吹扫完成的信息,控制所述第一正压腔门打开;在所述巡检机器人驶入所述第一正压腔的情况下,控制所述第一正压腔门关闭,并根据所述第一甲烷浓度传感器和所述第一压力传感器的第一检测结果控制所述第一进气阀和所述第一出气阀,以将所述第一正压腔内的气体置换为保护气体;在气体置换完成的情况下,控制所述第二正压腔门打开,以使所述换电模块将所述巡检机器人的电源模块转移至所述无线充电发射模块充电;在所述换电模块将满充储备电源转移至所述巡检机器人的情况下,控制所述第二正压腔门关闭,以及所述第一正压腔门打开;在所述巡检机器人驶出所述第一正压腔的情况下,控制所述第一正压腔门关闭。上述方案保障了巡检机器人的电源模块所在的充电环境的洁净度,避免了无线充电发射模块失效,实现了巡检机器人在煤矿井下的换电和自动充电。
34、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!