基于大数据的安全控制系统的制作方法
本发明涉及大数据监测,具体为一种基于大数据的安全控制系统。
背景技术:
1、随着科学技术的不断发展,汽车早已成为家家户户不可或缺的交通工具之一,人们生活水平不断提升,汽车比重逐渐增大,各种交通事故也随之而来。近几年频频出现的货车轧人事件,其实都在于驾驶时无法对盲区进行判断,不能准确掌握盲区内车辆之间或者与行人的安全距离,虽然新出的盲点监测系统为监测盲区情况提供了极大的便利,但也存在问题,经常会出现监测系统产生误报的情况,即因为隧道中信号接收较弱,以及光线不同程度的变化会将隧道中的墙壁部分判断为其他车辆产生误报,尤其是利用红外摄像头进行辅助的盲点监测系统,还容易受到天气的影响,在雨雪天、夜晚等可见度低的情况下,摄像头的效果就较差,其误差与精确度大幅度降低,使用中控显示屏进行提示时就需要驾驶员进行主要的观察判断,区别判断系统提示的到底是隧道的墙壁区域还是后方真的有车辆靠近,驾驶员需要实时注意显示屏,其带来的后果就是容易分心驾驶,驾驶安全不能得到保障,造成交通事故的发生。因此,设计降低识别误差和实现安全控制的基于大数据的安全控制系统十分必要。
技术实现思路
1、本发明的目的在于提供基于大数据的安全控制系统,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:基于大数据的安全控制方法,包括以下步骤:
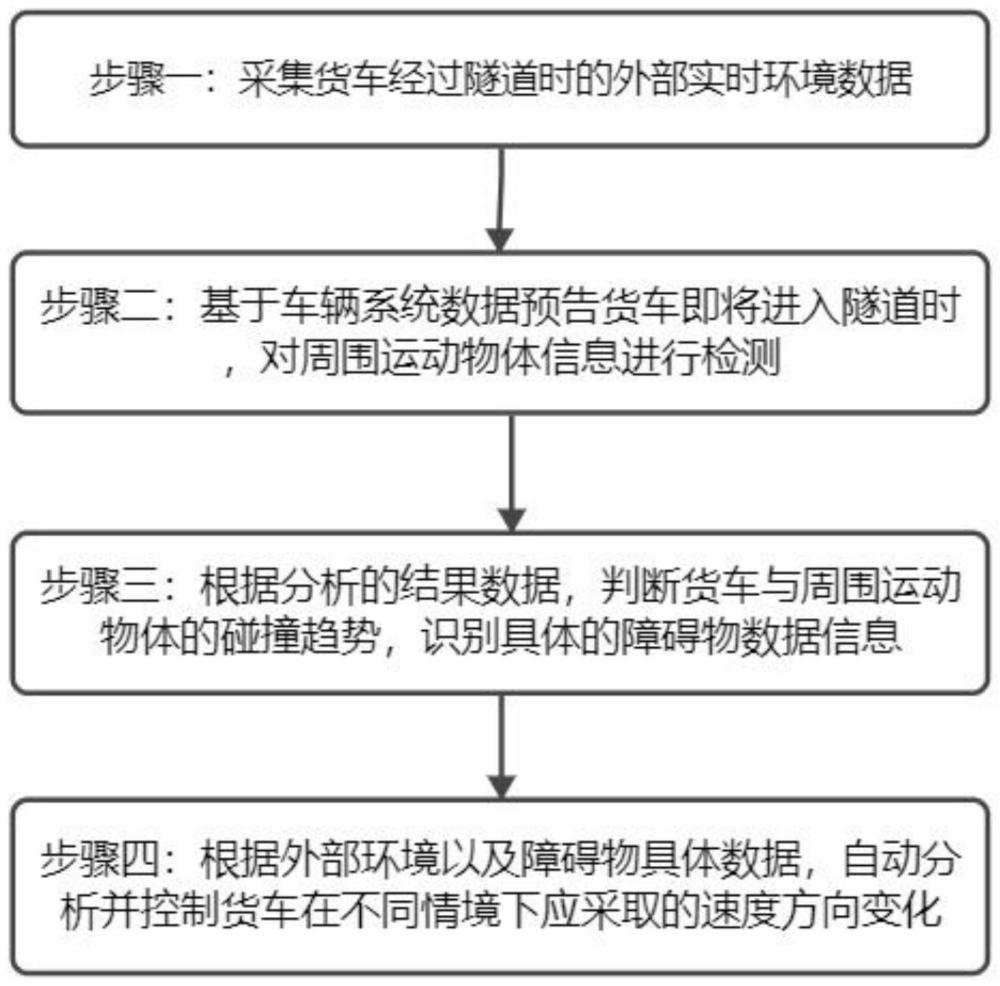
3、步骤一:采集货车经过隧道时外部实时环境数据;
4、步骤二:基于车辆系统数据预告货车即将进入隧道时,对周围运动物体信息进行检测,对探测到的周围靠近的运动物体进行测算分析;
5、步骤三:根据分析的结果数据,判断货车与周围运动物体的碰撞趋势,识别具体的障碍物数据信息;
6、步骤四:根据外部环境以及障碍物具体数据,自动分析并控制货车在不同情境下应采取的速度方向变化。
7、根据上述技术方案,所述采集货车经过隧道时外部实时环境数据的步骤,包括:
8、将光线传感器安装在前罩风栅位置,通过光线传感器检测货车经过隧道中光线的明暗程度,利用输出电压控制车载电子设备,获取到货车处于隧道时的光线强度数据;
9、将光学式传感器安装在前挡风玻璃后面,利用光学式传感器的光的折射原理检测货车进入隧道前的天气状况数据。
10、根据上述技术方案,所述货车即将进入隧道时对周围运动物体信息进行检测的步骤,包括:
11、将货车盲点监测系统安装在左右后视镜,利用摄像头视觉影像的技术方式来监测货车盲区内是否有障碍物;
12、将超声波传感器安装在货车侧面,利用超声波传感器的超声波反射接收的时间差来计算货车与盲区内障碍物之间的距离l。
13、根据上述技术方案,所述对探测到的周围靠近的运动物体进行测算分析的步骤,包括:
14、将短波雷达安装在车侧或后保险杠处,利用短波雷达发射接收电磁波信号分析出障碍物的距离、方向和速度信息,根据雷达的天线方向图的来衡量障碍在货车盲区内的具体方位数据信息。
15、根据上述技术方案,所述识别具体的障碍物数据信息的步骤,包括:
16、根据采集到的障碍物的数据分别进行对比分析,如果障碍物的速度与货车处于相对速度,则障碍物为是隧道墙壁,不需要进行执行单元;如果障碍物与货车的距离随着时间在实时变化,则障碍物为是车辆,将执行信号传给执行单元,利用声光报警器提醒驾驶员安全驾驶。
17、根据上述技术方案,所述分析并控制货车在不同情境下应采取的速度方向变化的步骤,包括:
18、将传感器采集到的障碍物类别、位置、距离以及车辆自身的速度、油门踏板等信息作为输入,利用建立的规则对货车速度控制进行分析,最后输出执行信号,对载重货车的行驶速度和方向进行控制,实现载重货车的主动安全控制。
19、根据上述技术方案,所述该系统包括:
20、采集外部环境模块,用于采集具体场景下的光线强度和天气状况实时数据;
21、感知模块,用于监测载重货车后方视野盲区是否有运动物体以及采集靠近货车盲区内运动物体的具体数据信息;
22、电子控制模块,用于将感知信息模块传送的运动物体的具体数据信息进行处理判断,并输出信号指令给执行模块;
23、执行模块,用于接受并执行电子控制模块传输的信号指令。
24、根据上述技术方案,所述采集外部环境信息模块包括:
25、光线强度采集模块,用于采集具体场景下光线强度的实时数据;
26、天气状况采集模块,用于采集具体场景下天气状况的实时数据。
27、根据上述技术方案,所述感知信息模块包括:
28、摄像头采集数据模块,用于采用影像的技术方式,采集货车盲区内是否有运动物体的存在;
29、雷达采集数据模块,用于利用发射和接收电磁波的方法,监测载重货车盲区内运动物体和采集载重货车周围运动物体的具体数据信息;
30、超声波传感器采集数据模块,用于利用发射和接收超声波的时间差来计算运动物体与货车之间的实时距离。
31、根据上述技术方案,所述电子控制模块包括:
32、数据存储模块,用于存储记录感知模块和采集外部环境模块所采集的运动物体数据信息和隧道实时环境数据信息;
33、数据控制模块,用于将存储记录的运动物体的数据信息,判断货车与运动物体的运动趋势以及运动物体的数据信息,并向执行单元传输执行信号;
34、所述执行模块包括:
35、声音报警器模块,用于接收电子控制单元执行命令,并对驾驶员提供声音的提示;
36、灯光报警器模块,用于接收电子控制模块执行命令,以及向驾驶员显示后视镜内危险图标;
37、车速控制器模块,用于接收电子控制模块执行信号,并根据执行信号控制货车的行驶速度和刹车。
38、与现有技术相比,本发明所达到的有益效果是:本发明,通过采集货车经过隧道时隧道的外部实时环境数据;基于车辆系统数据预告货车即将进入隧道时,对周围运动物体信息进行检测,对探测到的周围靠近的运动物体进行测算分析;根据分析的结果数据,判断货车与周围运动物体的碰撞趋势,识别具体的障碍物数据信息;根据外部环境以及障碍物具体数据,自动分析并控制货车在不同情境下应采取的速度方向变化;利用建立的规则对货车速度控制进行分析,最后输出执行信号,对载重货车的行驶速度和方向进行控制,实现载重货车的主动安全控制,使得系统针对货车在隧道中的障碍物识别性更强。
技术特征:
1.基于大数据的安全控制方法,其特征在于:所述该方法包括以下步骤:
2.根据权利要求1所述的基于大数据的安全控制方法,其特征在于:所述采集货车经过隧道时外部实时环境数据的步骤,包括:
3.根据权利要求1所述的基于大数据的安全控制方法,其特征在于:所述货车即将进入隧道时对周围运动物体信息进行检测的步骤,包括:
4.根据权利要求1所述的基于大数据的安全控制方法,其特征在于:所述对探测到的周围靠近的运动物体进行测算分析的步骤,包括:
5.根据权利要求1所述的基于大数据的安全控制方法,其特征在于:所述识别具体的障碍物数据信息的步骤,包括:
6.根据权利要求1所述的基于大数据的安全控制方法,其特征在于:所述分析并控制货车在不同情境下应采取的速度方向变化的步骤,包括:
7.基于大数据的安全控制系统,其特征在于:所述该系统包括:
8.根据权利要求7所述的基于大数据的安全控制系统,其特征在于:所述采集外部环境信息模块包括:
9.根据权利要求7所述的基于大数据的安全控制系统,其特征在于:所述感知信息模块包括:
10.根据权利要求7所述的基于大数据的安全控制系统,其特征在于:所述电子控制模块包括:
技术总结
本发明公开了基于大数据的安全控制方法,所述该方法包括以下步骤:步骤一:采集货车经过隧道时的外部实时环境数据;步骤二:基于车辆系统数据预告货车即将进入隧道时,对周围运动物体信息进行检测,对探测到的周围靠近的运动物体进行测算分析;步骤三:根据分析的结果数据,判断货车与周围运动物体的碰撞趋势,识别具体的障碍物数据信息;步骤四:根据外部环境以及障碍物具体数据,自动分析并控制货车在不同情境下应采取的速度方向变化;利用建立的规则对货车速度控制进行分析,最后输出执行信号,对载重货车的行驶速度和方向进行控制,实现载重货车的主动安全控制,本发明,具有降低识别误差和实现安全控制的特点。
技术研发人员:郑明超
受保护的技术使用者:成都鑫动源乐信息技术有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!