驾驶支援装置的制作方法
本发明涉及驾驶支援装置。更具体而言,涉及能够有效地执行碰撞避免支援,并且有效地降低用于执行碰撞避免支援的控制装置中的运算处理负荷的驾驶支援装置。
背景技术:
1、在该技术领域中,已知有如下驾驶支援装置:在对存在于自身车辆的周边的物标(物体目标)进行检测,判定为该物标与自身车辆发生碰撞的可能性高的情况下,进行用于避免该物标与自身车辆的碰撞的支援(以下,有时称为“碰撞避免支援”)。
2、然而,以往作为用于检测存在于自身车辆的周边的物标的手段而使用的前方雷达的视角狭窄,因此,例如在交叉点等处难以通过前方雷达早期地检测到从侧方接近自身车辆的物标。因此,如今,以早期地检测到从侧方接近自身车辆的物标等为目的,广泛应用对存在于自身车辆的前侧方(右前及左前)的物标进行检测的雷达(以下,有时称为“前侧方雷达”)。
3、图1是示出其他车辆从侧方接近具备前方雷达和前侧方雷达的自身车辆的情形的示意图。在图1中,对能够通过自身车辆10所具备的前方雷达(未图示)检测物标的区域f施加了纵条纹的纹路,对能够通过自身车辆10所具备的前侧方雷达(未图示)检测物标的区域s施加横条纹的纹路。其结果,在区域f与区域s重叠的范围被施加纵横的格子的纹路。
4、如区域f所示,前方雷达的视角狭窄,因此,难以通过前方雷达早期地检测到从侧方接近自身车辆10的其他车辆20。然而,通过应用如区域s所示那样朝向自身车辆10的前侧方具有广视角的前侧方雷达,能够早期地检测到其他车辆20。另外,如图1所示,在本说明书中,将自身车辆的行进方向设为x轴的正方向,将从自身车辆的右侧方朝向左侧方的方向设为y轴的正方向。另外,虽然没有图示,但将自身车辆的位置设为原点。
5、通过如上述那样应用前侧方雷达,能够更切实地进行碰撞避免支援,另一方面,以作为存在于自身车辆的周边的物标而被检测到的物标的数量增加为起因,用于执行碰撞避免支援的控制装置中的运算处理负荷也增大。若为了应对这样的运算处理负荷的增大而要提高控制装置的运算处理能力,则有可能导致执行碰撞避免支援的驾驶支援装置的成本增大。因此,将判定为与自身车辆发生碰撞的可能性低的物标排除在碰撞避免支援的对象之外以降低运算处理负荷的必要性越发变高。
6、例如,在专利文献1中公开了如下车辆用控制装置,具备:接收自身车辆的周围信息的周围信息接收部;接收自身车辆的车辆信息的车辆信息接收部;基于周围信息和车辆信息来判断自身车辆的周围状况的周围状况判断部;以及基于周围状况对自身车辆的致动器进行控制的车辆控制部。在该车辆用控制装置中,周围信息接收部具备:进行从周围信息传感器发送来的数据的接收处理的数据接收部;进行将接收处理后的数据转换为周围状况判断部能够利用的形式的转换处理的数据转换部;以及基于接收处理后的数据决定从接收处理的对象中除外的数据或决定从转换处理的对象中除外的数据的除外数据决定部。由此,能够降低从传感器发送来的数据的处理造成的负荷。
7、在上述以往技术中,作为用于决定从接收处理或转换处理的对象中除外的数据的具体的方法,例如可举出如下方法:将从“预先确定的可靠度比预定的阈值低的传感器”或者“对预先确定的可靠度比预定的阈值低的物标或存在于自身车辆的行进方向的相反侧的物标进行检测的传感器”输出的数据除外。然而,并不能说通过具有比阈值低的可靠度的传感器检测到的物标、具有比阈值低的可靠度的物标和/或存在于自身车辆的行进方向的相反侧的物标与自身车辆发生碰撞的可能性必定低。
8、另一方面,根据上述方法,例如从预先确定的可靠度比预定的阈值高的传感器以及对预先确定的可靠度比预定的阈值高的物标或存在于自身车辆的行进方向的相同侧的物标进行检测的传感器输出的数据不从接收处理或转换处理的对象中除外。因此,对于通过具有比阈值高的可靠度的传感器检测的物标、具有比阈值高的可靠度的物标和/或存在于自身车辆的行进方向的相同侧的物标,例如即使与自身车辆发生碰撞的可能性低,由于不从接收处理或转换处理的对象中除外,因此不一定能够降低从传感器发送的数据的处理造成的负荷。
9、即,在该技术领域中,寻求能够有效地执行碰撞避免支援,并且有效地降低用于执行碰撞避免支援的控制装置中的运算处理负荷的技术。
10、现有技术文献
11、专利文献
12、专利文献1:日本特开2020-119183号公报
技术实现思路
1、发明所要解决的课题
2、如前所述,在该技术领域中,寻求能够有效地执行碰撞避免支援,并且有效地降低用于执行碰撞避免支援的控制装置中的运算处理负荷的技术。
3、用于解决课题的技术方案
4、因此,本发明人进行深入研究,结果得到了如下见解:将通过前侧方雷达检测的物标(物体目标)中的、不存在于前方雷达的物标检测范围且该物标的行驶预测轨迹与自身车辆的行驶预测轨迹在自身车辆的前方侧的距自身车辆预定的距离以内的位置处交叉的物标设为基于通过前侧方雷达取得的信息判定与自身车辆发生碰撞的可能性的对象,由此能够解决上述课题。
5、具体而言,本发明的驾驶支援装置(以下,有时称为“本发明装置”)是具备第1物标信息取得单元、第2物标信息取得单元以及碰撞避免支援控制单元的驾驶支援装置。第1物标信息取得单元取得作为关于存在于自身车辆的前方区域的物标的信息的第1信息。第2物标信息取得单元取得作为关于存在于自身车辆的前侧方区域的物标的信息的第2信息。碰撞避免支援控制单元在判定为存在碰撞风险物标的情况下执行碰撞避免支援,所述碰撞风险物标是基于第1信息和第2信息中的至少一方判定为与自身车辆发生碰撞的可能性高的物标,所述碰撞避免支援是用于避免自身车辆与碰撞风险物标的碰撞的支援。
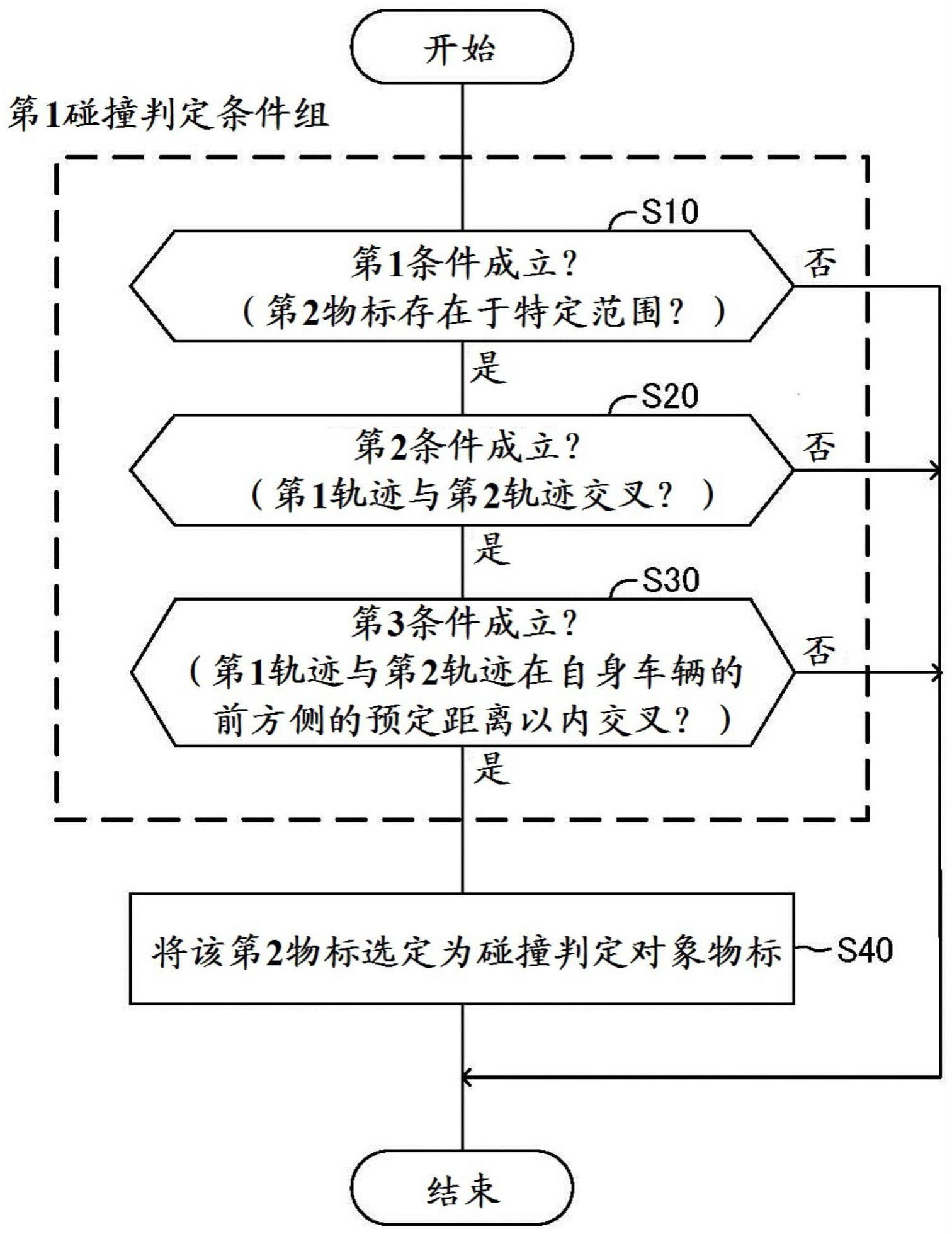
6、而且,在本发明装置中,碰撞避免支援控制单元具备碰撞判定物标选定部,所述碰撞判定物标选定部从被取得第2信息的物标即第2物标中选定碰撞判定对象物标,所述碰撞判定对象物标是设为基于第2信息判定与自身车辆发生碰撞的可能性的对象的第2物标。碰撞判定物标选定部将作为包括以下例举的第1条件至第3条件的条件组的第1碰撞判定条件组所包括的全部条件同时成立的第2物标选定为碰撞判定对象物标。
7、第1条件是第2物标存在于特定范围这一条件,所述特定范围是将作为第1范围与第2范围重叠的范围的第3范围从第2范围中去除而得到的范围,所述第1范围是第1物标信息取得单元的物标检测范围,所述第2范围是第2物标信息取得单元的物标检测范围。
8、第2条件是作为自身车辆的行驶预测轨迹的第1轨迹与作为第2物标的行驶预测轨迹的第2轨迹交叉这一条件。
9、第3条件是第1轨迹与第2轨迹在第1轨迹中的自身车辆的前方侧的距自身车辆预定的距离以内的位置处交叉这一条件。
10、发明效果
11、如上所述,在本发明装置中,第1条件至第3条件全部同时成立的第2物标被选定为碰撞判定对象物标。换言之,在本发明装置中,第1条件至第3条件中的哪怕是任意1个不成立的第2物标也不被选定为碰撞判定对象物标。由此,在本发明装置中,能够将与自身车辆发生碰撞的可能性低的第2物标从碰撞避免支援的对象中除外。因此,根据本发明装置,能够有效地执行碰撞避免支援,并且有效地降低用于执行碰撞避免支援的控制装置中的运算处理负荷。
12、本发明的其他目的、其他特征以及附带的优点根据以下关于参照附图记述的本发明的各实施方式的说明而容易理解到。
- 还没有人留言评论。精彩留言会获得点赞!