一种混合动力汽车自动识别地下车库场景的方法、系统及车辆与流程
本发明属于汽车nvh控制领域,具体涉及混合动力汽车自动识别地下车库场景的技术解决方案。
背景技术:
1、汽车行业正在加速进入电动化、智能化、网联化和共享化——“新四化”时代,汽车动力系统电动化、控制系统智能化的浪潮越来越澎湃。混合动力汽车的动力系统搭载发动机和电机进行多种多样的动力集成,由传统动力汽车的单一的发动机工况变为发动机和电机的组合工况,工况多而且复杂。这对汽车的nvh、驾驶性、油耗、电耗等诸多性能属性的控制带来了极大的挑战,在不增加成本的前提下,往往顾此而失彼。这就要求混合动力汽车对不同的场景能进行自动识别,以针对性实施不同的控制策略,从而做到多性能属性之间的平衡。智能化的控制系统给解决这一类技术命题带来了机遇。
2、混合动力汽车在地下车库场景中运行时,会产生nvh问题。面对此问题,对于燃油车,通过软件优化换挡策略即可轻松解决。但是对于混合动力汽车,如果优化换挡策略,会对非地下车库场景的换挡策略也覆盖,从而对非地下车库场景的其他部分性能属性带来负面影响。因此,混合动力汽车在地下车库场景中运行时的nvh控制策略,就要求仅针对地下车库场景实施,这就提出了具体的技术命题:自动识别地下车库场景。
3、而对于车辆如何自动识别地下车库场景,现有技术已有部分公开,例如中国专利文献cn109969171a就公开了一种在狭窄场所中防止车辆误加速的车库模式控制单元,其通过信息传输端口接收检测到的车辆环境信息和车辆状态信息,通过内部处理模块基于所述车辆环境信息判断车辆是否处在狭窄场所,并且在判断出车辆处在狭窄场所时产生车库模式控制信号,信号包括车库模式触发信号和车库模式中的车辆控制参数。其中车辆环境信息包括驻车雷达信号、摄像头信息、gps信息、车距传感器信息,还包括环境亮度信号和/或雨量传感器信号。车辆状态信息包括制动力矩,动力源扭矩,动力源转速,车速,轮速,当前挡位,加速踏板开度,制动信号开关,方向盘转角等。该技术的目的是利用车辆现有的硬件实现在狭窄场所中操控车辆中主动避免误加速,避免或减轻因添加此功能导致的车辆成本升高问题,提高狭窄场所中操控车辆时的安全性
4、以上技术文献公开的对地下车库场景的识别,涉及到获取很多信号,例如各种车辆环境信息和车辆状态信息等,而对这些信息如何选择、逻辑匹配运用,如何达到针对特定需要的有效对应识别,该技术没有这方面的研究。该技术更多的是对识别出地下车库场景后的控制系统和控制方法的研究。
5、类似地,现有技术报道的对地下车库场景识别的技术中,均是较为通过的通过车辆环境信息和状态信息作出间断的识别判断,而重在研究对识别到车库场景后,后续的具体控制应用方面。
6、而面对混合动力汽车在地下车库场景中运行时,尤其是在nvh控制策略需要仅针对地下车库场景实施,对混合动力汽车如何精准有效地自动识别地下车库场景提出了特殊的要求,以上现有技术通用的识别判断方法不能满足混合动力汽车在地下车库场景实施nvh控制策略的需要。
技术实现思路
0、
技术实现要素:
1、针对现有技术存在的不足,本发明的目的是提供一种混合动力汽车自动识别地下车库场景的方法、系统与车辆,通过低成本地选取较少的信息,并设计合理判断逻辑,满足在各种状况下的准确识别,以有效地为实施具体的nvh控制策略或其他策略提供前置条件。
2、为实现以上发明目的,本发明采用以下技术方案:
3、本发明在第一方面,提供一种混合动力汽车自动识别地下车库场景的方法,该方法包括如下逻辑步骤:
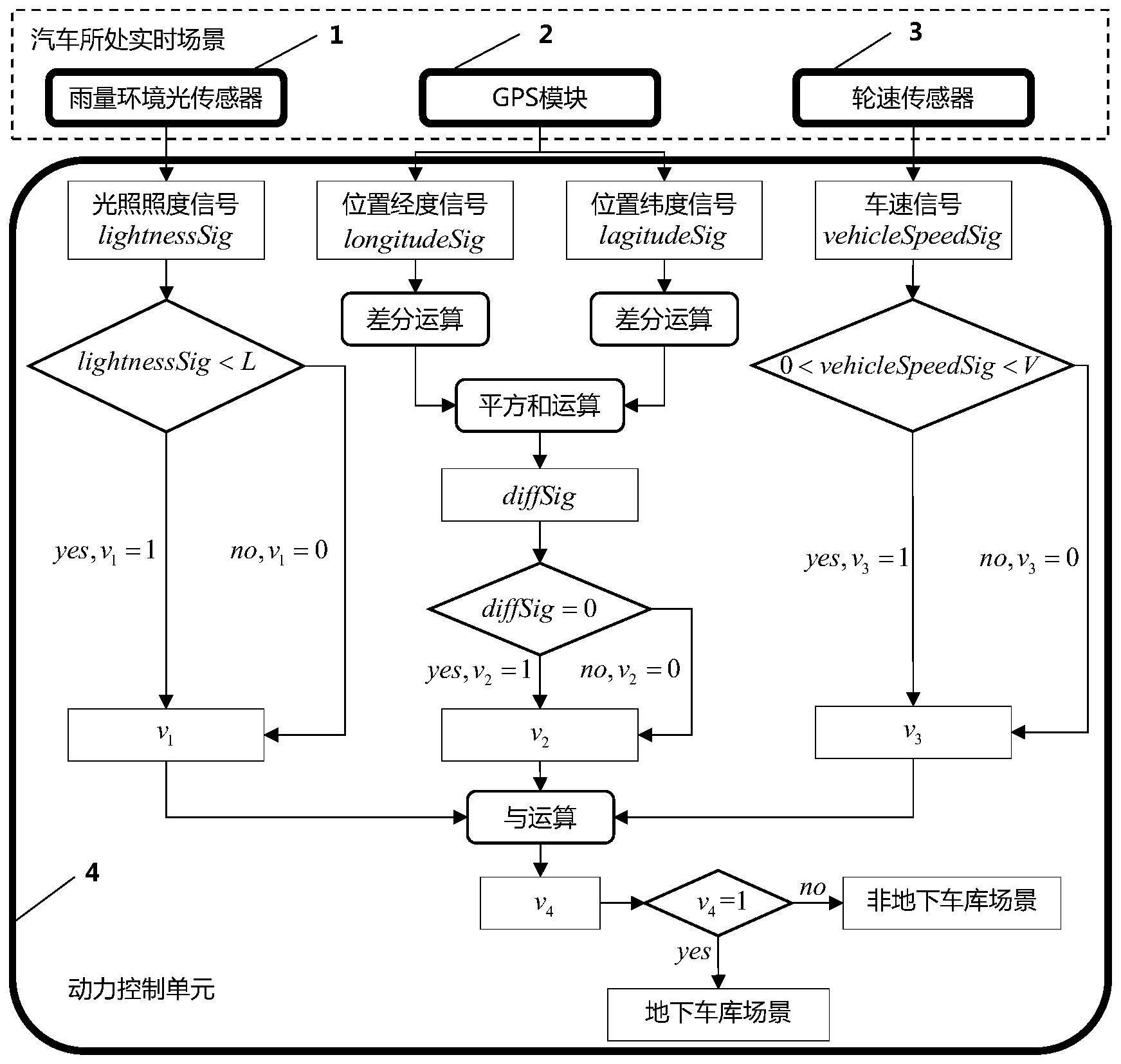
4、首先,获取汽车行驶中实时场景下的环境光照度信号lightnesssig,位置经纬度信号longitudesig和车速信号vehiclespeedsig至少这三种信号。
5、然后,对以上三种信号进行逻辑运算处理,分别的处理判断逻辑如下:
6、对于环境光照度信号,将所述环境光照度信号lightnesssig与地下车库场景的光照照度阈值l进行比较,当lightnesssig<l时,令第一状态变量v1=1;当lightnesssig≥l时,令第一状态变量v1=0。
7、对于位置经纬度信号,先对所述位置经纬度信号进行差分运算得到车辆位置经纬度是否变化的指示信号diffsig,即汽车在运动的特征信息,再判断所述车辆位置经纬度是否变化的指示信号diffsig是否为0,当diffsig=0时,令第二状态变量v2=1,此时意味着车辆进入了掩体(地下车库等场景)后gps信号丢失,或者车辆处于原地静止状态;当diffsig>0,令第二状态变量v2=0,此时意味着车辆gps信号正常并且车辆处于运动状态。
8、对于车速信号,需要将所述车速信号vehiclespeedsig与速度阈值v进行比较,当0<vehiclespeedsig<v时,令第三状态变量v3=1;当vehiclespeedsig=0或vehiclespeedsig≥v时,令第三状态变量v3=0。这里对于车速信号的处理,是为了将自动识别地下车库场景的功能限制在一定的车速范围内。
9、最后,对以上所述第一、第二和第三变量v1、v2、v3进行逻辑“与”运算,记为第四状态变量v4,当v4=1时,则可判断当前汽车所处的实时场景为地下车库场景;当v4=0时,则判断当前汽车所处的实时场景为非车库场景。
10、通过本发明上述的技术方案可见,本方法仅仅只需要选取环境光照度信号lightnesssig、位置经纬度信号longitudesig和车速信号vehiclespeedsig这三种信号。考虑到地下车库场景同露天场景的主要区别在于:一是车辆进入地下车库场景后gps信号会丢失,即使车辆在运动,但是gps传感器发出的车辆位置经纬度信号会不再变化;二是根据国标《建筑照明设计标准》的对地下车库照明的最低规定,以及节能减排的要求,地下车库场景下的光照照度设计值一般都是按国标规定的下限值设计。再就是地下车库的光源都是按分布式布置,车辆运动过程中,环境光传感器采集的光照照度信号的强弱和频率等特征,同露天室外环境下采集的光照照度信号的强弱和频率等特征有明显差异;三是,从行车安全的角度出发,正常车主在地下车库场景内驾车时,车速一般都不会太高。因此可以基于这几个信号,通过合适的逻辑运算,就具备比较准确的自动识别出地下车库场景可行性。通过合理地对以上信息进行处理,并设计合理的逻辑判断,即可则较为准确的判断当前汽车所处的实时场景为地下车库场景或是非车库场景,为混合动力车辆实施具体的nvh控制策略或其他策略提供前置条件。
11、根据本发明的一个实施例,本发明中,对所述位置经纬度信号进行差分运算,可以采用的公式如下:
12、diffsig(k)=(longitudesig(k+1)-longitudesig(k))2+(lagitudesig(k+1)-lagitudesig(k))2
13、式中,k是指信号的时序,diffsig是车辆位置经纬度是否变化的指示信号,longitudesig是位置经度信号,lagitudesig是位置纬度信号。
14、进一步,考虑到地下车库的光源都是按分布式布置,车辆运动过程中,环境光传感器采集的光照照度信号的强弱和频率等特征,同露天室外环境下采集的光照照度信号的强弱和频率等特征有明显差异。增加时长t,是为了增加对光照照度信号的频率特征的识别和判断,因此,在本发明的一实施例中,本发明在对光照照度信号lightnesssig与地下车库场景的光照照度阈值l进行比较运算时,当lightnesssig<l时,且持续时长t,则令状态变量v1=1;当lightnesssig≥l时,且持续时长t,则令状态变量v1=0。
15、更进一步,考虑到为避免错误将类地下车库场景,如汽车试验室等,判断为地下车库场景,提高自动识别的精准度,在对光照照度信号lightnesssig进行逻辑运算时,需要对光照照度信号lightnesssig与地下车库场景的光照照度阈值l和类地下车库场景的光照照度lh进行比较,当lightnesssig<l时,且持续时长t,令状态变量v1=1;当l≤lightnesssig<lh时,且持续时长t,且时长t内光照度变化量大于δ时,令状态变量v1=1。
16、根据本发明的一个实施例,本发明在对于位置经纬度信号进行处理中,同样的道理,对车辆位置经纬度是否变化的指示信号diffsig判断是否为0时,当diffsig=0时,且持续时长t,则令状态变量v2=1;当diffsig>0,且持续时长t,令状态变量v2=0。
17、根据本发明的一个实施例,本发明在对汽车车速信号的处理中,在对汽车车速信号vehiclespeedsig与速度阈值v进行比较运算时,当0<vehiclespeedsig<v时,且持续时长t,则令状态变量v3=1;当vehiclespeedsig=0或vehiclespeedsig≥v时,且持续时长t,令状态变量v3=0。
18、在以上的判断中,所需要使用到的地下车库场景的光照照度阈值l、类地下车库场景的光照照度lh、光照度变化量δ、速度阈值v、持续时长t均可以通过标定获得。即:
19、持续时长t是标定量,需结合具体项目实际情况对地下车库场景自动识别的准确度和快慢来标定得到,例如具体项目中标定为2秒。
20、地下车库场景的光照照度阈值l是对地下车库场景的光照照度的标定值,可以依据国标《建筑照明设计标准》中的规定并结合实际场景标定得到。
21、类地下车库场景的光照照度lh是对类地下车库场景的光照照度的标定值。类地下车库场景是指与地下车库场景相似,但是光照照度又高于地下车库的场景,如汽车试验室等,同样可以依据国标《建筑照明设计标准》中的规定并结合实际场景标定得到。
22、进一步,在本发明的第二方面,还提供一种混合动力汽车自动识别地下车库场景的系统,所述包括汽车的环境光传感器、卫星导航定位模块、轮速传感器和控制单元。
23、所述环境光传感器用于实时测量汽车所处环境下的环境光照度信号,包含光照照度信息。
24、根据本发明的以实施例,所述环境光传感器采用雨量环境光传感器,通过检测汽车挡玻璃上的雨水以及汽车外界环境光照照度,并向汽车雨刮器和照明系统控制器发出指令信号。
25、所述卫星导航定位模块用于实时测量汽车所处环境的定位信号,包含汽车所处地理位置的经纬度信息。具体地,所述卫星导航定位模块为gps、北斗、伽利略卫星导航定位系统。
26、所述轮速传感器用于实时测量汽车车轮的转速信号并进一步计算得到汽车的车速信号。
27、所述控制单元用于接收前述信号并按前述第一方面所述的方法进行信号处理,发出指令控制汽车上的零部件执行相应动作。在本发明的一实施例中,所述控制单元优选动力控制单元pcu。
28、本发明在第三方面,还提供一种车辆,所述车辆配置有以上第方面所述的混合动力汽车自动识别地下车库场景的系统。
29、本发明提出的混合动力汽车自动识别地下车库场景的方法,是一种基于汽车的环境光检测信号、gps模块信号以及车速信号的特征,进行具体的逻辑运算,从而判断识别出地下车库场景,本发明通过采用以上技术方案,具有如下优点效果:
30、本发明针对混合动力汽车在地下车库场景实施nvh控制策略的需要,选取应用环境光照度信号lightnesssig、位置经纬度信号longitudesig和车速信号vehiclespeedsig,通过合适的逻辑运算即实现了对地下车库场景的识别,并可以满足在各种状况下的准确识别,有效地为实施具体的nvh控制策略或其他策略提供前置条件。
31、本发明采用的以上三个信号,目前绝大多数汽车都可以通过现有的传感器采集得到,相比通过图像信号自动识别地下车库场景的技术,无需额外增加摄像头、图像识别智能算法。因此,技术实现难度低,成本低,适用于低端非智能汽车产品的简单判断。
32、本发明既可以配合nvh控制策略的需要,也可以推广到其他需要自动判断是否地下车库场景的情况
- 还没有人留言评论。精彩留言会获得点赞!