基于车路协同信息风险系数的ACC控制预警方法和装置与流程
本发明涉及智能辅助驾驶adas技术,特别是涉及一种基于车路协同信息风险系数的acc控制预警方法和装置。
背景技术:
1、随着智能辅助驾驶adas技术的快速发展,目前众多量产车型均已搭载自适应巡航系统(adaptive cruise control,简称acc系统)。acc系统是采用环境感知传感器(毫米波雷达、摄像头等)探测前方车辆与本车的相对距离和相对速度,通过对ems控制器和esc控制器进行控制,以达到对自车车速进行自适应控制的系统。由于毫米波雷达和摄像头等传感器对目标物的识别均具有一定的局限性,为了使acc系统能够可用,不会频繁地对道路基础设施做出“误响应”,各主机厂在acc功能使用手册中基本上都会说明“acc系统可能无法识别静止目标物”,但是驾驶员在不知情、分心驾驶或操作不当的情况下使用acc系统可能会发生以下问题:
2、一、可能会导致车辆与前方的静止车辆或者故障车辆发生碰撞;
3、二、可能会导致车辆与道路施工设施、拥堵路段的静止车辆或者交通事故现场的事故车辆发生碰撞。
4、
5、基于前述的问题,有发明人尝试将c-v2x技术结合路测单元rsu(road side unit)提供的v2i信息和周围车辆的v2v信息,对主车与远车之间的碰撞风险进行检测;若检测到主车与远车不存在碰撞风险时,且在根据主车驾驶员的驾驶专注情况判定主车驾驶员行为规范驾驶后,开启主车自适应巡航系统。该发明基于c-v2x技术对任何道路进行目标车辆实时监测来降低碰撞风险,还能提高驾驶安全性和乘坐舒适性,例如cn 113682305 a,该发明可确保在驾驶员行为规范后才能开启acc系统,能够降低acc系统滥用带来的风险,但是这也会大大限制acc系统的使用场景,而且也无法应对acc系统开启过程中面临的突发风险。
6、有鉴于此,有的发明人提出了多传感器与v2x融合的低速巡航方法,可实现在v2x装车率不高时,通过对装备有v2x设备的传统adas车辆采集数据进行状态反推、数据过滤与数据融合,提高已装备v2x设备车辆的感知与应用范围,从技术角度极大地促进v2x的应用推广进度;同时可提高车辆的感知范围,提前对车辆前方拥堵路段环境做出预判,提高车辆自适应巡航的稳定性和车辆低速巡航燃油经济性,并降低v2x应用对装车率的依赖性,例如cn 110606083 a,该发明旨在通过车路协同技术获取前方拥堵信息,使acc系统提前做出预判,提高车辆自适应巡航的稳定性和车辆低速巡航燃油经济性。但是该发明无法应对前方静止或者故障车辆、道路施工、交交通事故等场景,在acc系统的安全性方面还有待进一步提高。
7、所以,现有的技术方案在acc系统使用过程中均无法应对前方静止或者故障车辆、道路施工、交通拥堵、交通事故等场景。
技术实现思路
1、本发明的目的是为了克服上述背景技术的不足,提供一种基于车路协同信息风险系数的acc控制预警方法和装置,使其能够基于车路协同信息风险系数的控制和预警方法来提高acc系统的使用安全性,同时使acc系统的适用范围得到进一步拓展。
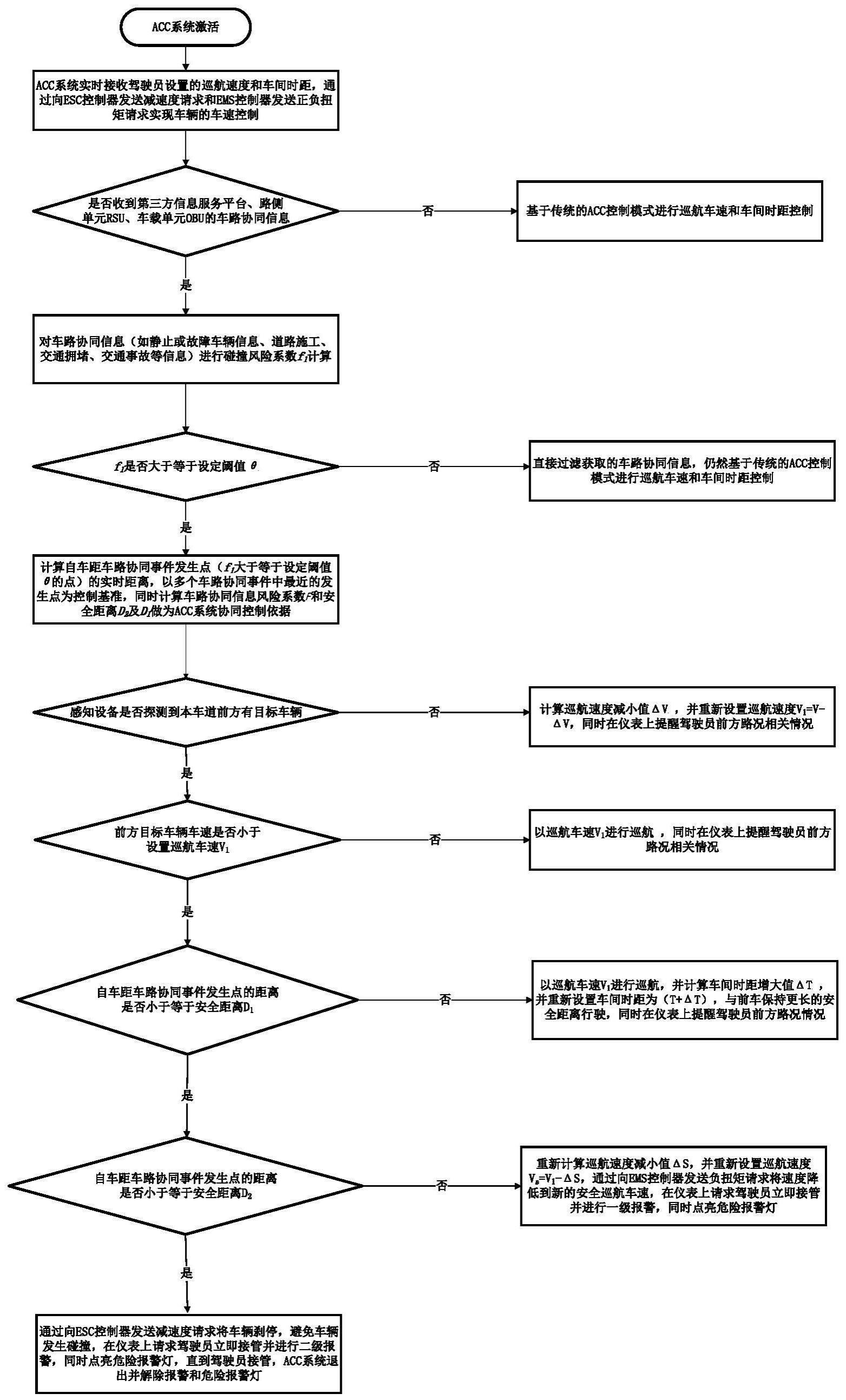
2、本发明提供的一种基于车路协同信息风险系数的acc控制预警方法,包括如下步骤:s1、acc系统实时接收驾驶员设置的巡航速度和车间时距,通过向esc控制器发送减速度请求和ems控制器发送正负扭矩请求实现车辆的车速控制;s2、检测车载单元obu是否收到车路协同信息,若未收到车路协同信息则基于步骤s1的acc控制模式进行巡航车速和车间时距控制;s3、若检测车载单元obu已经收到车路协同信息,对车路协同信息进行碰撞风险系数f1计算,并判断碰撞风险系数f1是否大于等于设定阈值θ,若碰撞风险系数f1小于设定阈值θ,则基于步骤s1的acc控制模式进行巡航车速和车间时距控制;s4、若碰撞风险系数f1大于等于设定阈值θ,则计算自车距车路协同事件发生点的实时距离和车路协同信息风险系数f,同时以多个车路协同事件中最近的发生点为控制基准,计算第一安全距离d1及第二安全距离d2并将其作为acc系统协同控制依据;s5、检测车载感知设备是否探测到本车道前方有目标车辆,若没有目标车辆,则计算巡航速度减小值δv,并将原来的巡航速度v重新设置为v1=v-δv,同时在仪表上提醒驾驶员前方路况相关情况;s6、若检测车载感知设备探测到本车道前方有目标车辆,且前方目标车辆车速大于等于重新设置的巡航车速v1,则以巡航车速v1进行巡航,同时在仪表上提醒驾驶员前方路况相关情况;s7、若前方目标车辆车速小于重新设置的巡航车速v1,且自车与前方车路协同事件发生点的距离大于第一安全距离d1,则以巡航车速v1进行巡航,并计算车间时距增大值δt,并重新设置车间时距为(t+δt),与前车保持更长的安全距离行驶,同时在仪表上提醒驾驶员前方路况情况;s8、若自车与前方车路协同事件发生点的距离大于第二安全距离d2且小于第一安全距离d1,则重新计算巡航速度减小值δs,并重新设置巡航速度vs=v1-δs,通过向ems控制器发送负扭矩请求将速度降低到对应的安全巡航车速,在仪表上请求驾驶员立即接管并进行一级报警,同时点亮危险报警灯;s9、若自车与前方车路协同事件发生点的距离小于等于第二安全距离d2,则通过向esc控制器发送减速度请求将车辆刹停,避免车辆与前方危险障碍物发生碰撞,刹车过程中在仪表上请求驾驶员立即接管并进行二级报警,同时点亮危险报警灯,直到驾驶员接管后,acc系统退出并解除报警和危险报警灯。
3、在上述技术方案中,所述步骤s3的具体过程如下:s31、车载单元obu接收到车路协同信息后,提取车路协同事件信息中的经纬度信息;s32、将经纬度坐标转换成高斯投影坐标;s33、按照车路协同信息风险计算表计算碰撞风险系数f1;s34、判断f1是否大于等于设定阈值θ,若小于阈值θ,直接过滤获取的车路协同信息,基于步骤s1的acc控制模式进行巡航车速和车间时距控制。
4、在上述技术方案中,所述步骤s33中,车路协同信息风险计算表。
5、在上述技术方案中,所述步骤s33中,碰撞风险系数f1计算公式如下:f1=a1j*k1+a2j*k2+a3j*k3+a4j*k4;其中,aij是根据等级判定条件确定的分数,且aij为处于1—10之间的整数;ki为单项指标权重,满足f1为单项影响因素的风险系数,且0≤f1≤10。
6、在上述技术方案中,所述步骤s4的具体过程如下:s41、若碰撞风险系数f1大于等于阈值θ,根据转换后的高斯投影坐标计算自车距车路协同事件发生点的实时距离;s42、计算车路协同信息风险系数f:f2=b1j*l1+b2j*l2+b3j*l3+b4j*l4,f3=c1j*m1+c2j*m2+c3j*m3+c4j*m4,f=f1*q1+f2*q2+f3*q3,其中,bij、cij是根据等级判定条件确定的分数,且bij、cij均为处于1—10之间的整数;li、mi为单项指标权重,满足fi为单项影响因素的风险系数,且0≤fi≤10;qi为各影响因素权重,满足f为最终计算得到的车路协同信息风险系数;
7、s43、以多个车路协同事件中最近的发生点为控制基准,同时计算第二安全距离d2和第一安全距离d1作为acc系统协同控制依据,所述第二安全距离d2计算过程如下:其中,vl为当前行驶道路的最高限制速度,t0为制动系统的反应时间,amax为在acc控制模式下制动系统能够提供的最大减速度,ds为极端情况下避免碰撞所预留的安全距离;所述第一安全距离d1计算过程:d1=d2+v*t1,其中,v为当前设置巡航车速,t1为给驾驶员预留的突发事件应对时间。
8、在上述技术方案中,所述步骤s5中,巡航速度减小值δv计算公式如下:δv=a1*v+b1*f,其中,a1和b1为通过标定确定的系数,v为当前设置的巡航车速,f为计算得到的车路协同信息风险系数。
9、在上述技术方案中,所述步骤s7中,车间时距增大值δt计算公式如下:其中,c1和n1为通过标定确定的系数,ds为自车距车路协同事件发生点的实时距离,d2为安全距离,vh为自车速度,vf为前车速度,f为计算得到的车路协同信息风险系数。
10、在上述技术方案中,所述步骤s8中,巡航速度减小值δs根据标定map曲线查值计算得到;所述步骤s41中,所述自车距车路协同事件发生点是碰撞风险系数f1大于等于设定阈值θ的点;所述步骤s1之前还包括步骤s0、激活acc系统。
11、本发明还提供了一种基于车路协同信息风险系数的acc控制预警装置,能够执行基于车路协同信息风险系数的acc控制预警方法。
12、本发明又提供了一种计算机系统,该计算机系统包括基于车路协同信息风险系数的acc控制预警装置。
13、本发明的原理在于:基于碰撞风险系数对车路协同信息进行过滤和筛选,计算车路协同信息风险系数f以及安全距离d2和d1,将其作为acc系统协同控制的依据,并结合检测车载感知设备的目标车辆信息,针对不同的安全距离调整巡航设置车速和车间时距以及对驾驶员安全预警,提升acc系统使用安全性,同时使acc系统的适用范围得到进一步拓展。
14、本发明基于车路协同信息风险系数的acc控制预警方法和装置,具有以下有益效果:
15、本发明提出了一种基于车路协同信息风险系数的acc控制预警方法和装置,基于碰撞风险系数对车路协同信息进行过滤和筛选,同时计算车路协同信息风险系数f以及安全距离d2和d1做为acc系统协同控制的依据,结合检测车载感知设备的目标车辆信息,针对不同的安全距离调整巡航设置车速和车间时距以及对驾驶员安全预警。该方法可对前方静止车辆或故障车辆、道路施工、交通拥堵、交通事故等道路突发事件进行提前预判和预警,减少acc系统使用过程中由于车载传感器局限性造成的碰撞事故发生,提升acc系统使用过程中的安全性,同时增加了acc系统的适用场景。
- 还没有人留言评论。精彩留言会获得点赞!