一种基于货物信息的多路况厢式车速度控制方法与流程
本发明涉及智能物流运输,尤其涉及一种基于货物信息的多路况厢式车速度控制方法。
背景技术:
1、随着物流行业的发展,公路运输在日常生活中占据越来越重要的位置,厢式车作为公路运输的主要工具,对其运输过程的监测十分重要。但是运输过程道路环境复杂,部分地区的公路质量发展差,公路路面不平,货物容易在车厢内发生颠簸从而导致损坏或损毁。
2、]虽然目前已有关于运输过程中物流货物状态监测研究,但其监控通常只针对宏观上货物运输路线的追踪,而没有对车厢内部货物颠簸情况进行监测。例如,一种在中国专利文献上公开的“运输跟踪与警告方法及系统”,其公告号cn102800210a,包括:移动监控单元,适于通过基站设备上传运输车辆的实时状态数据;监控后台单元,适于通过基站设备获取运输车辆的实时状态数据,并且将实时状态数据与基准线路数据进行比较,如果两者的区别超过预定的阈值,产生异常;和运输可视监控单元,适于将所述异常进行可视化显示。还提供一种运输跟踪与警告方法,包括:步骤1、初始化运输线路和时效要求数据;步骤2、实时获取运输车辆当前的状态信息;和步骤3、将当前的状态信息与基准承运线路数据进行比较,如果超过预设的阈值,产生异常。
3、该方案仅对货物运输路线进行监控,而没有对厢体内部的货物颠簸情况和位移情况进行检测,无法实时监测厢体内部货物的实时状态,无法实现准确预警和报警,且没有相应的预防和调控手段。
技术实现思路
1、本发明主要解决现有物流运输过程中无法准确监测货物实时状态并进行预警和报警,无法避免颠簸导致货物损坏或损毁的技术问题,本发明结合现有厢式车中较为广泛的捆绑器应用和成熟的绑带张紧力测试装置,提出了一种基于货物信息的多路况厢式车速度控制方法,从厢式车中的绑带张力实时监测入手,并结合绑带张力变化与货物颠簸幅度的关联性,可以精准捕获当前货物的颠簸实时状态,并根据所装载货物的种类特性和路面的平整度情况限制最高行车速度,从而保证货物的颠簸程度在合理范围内,避免货物损坏或损毁,提高货物运输的安全性。
2、本发明主要通过以下技术方案解决上述技术问题,一种基于货物信息的多路况厢式车速度控制方法,包括以下步骤:
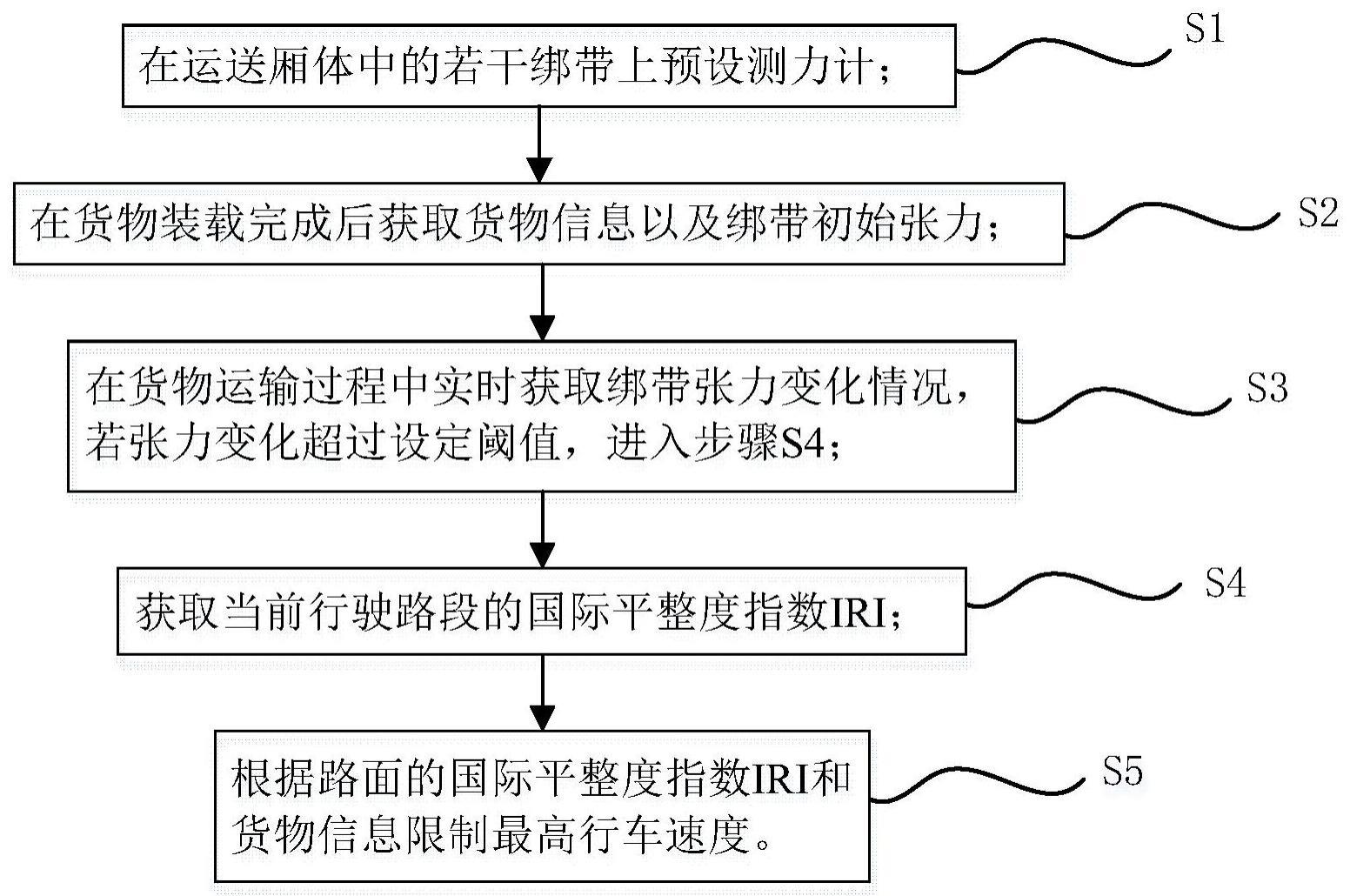
3、s1:在运送厢体中的若干绑带上预设测力计;
4、s2:在货物装载完成后获取货物信息以及绑带初始张力;
5、s3:在货物运输过程中实时获取绑带张力变化情况,若张力变化超过设定阈值,进入步骤s4;
6、s4:获取当前行驶路段的国际平整度指数iri;
7、s5:根据路面的国际平整度指数iri和货物信息限制最高行车速度。
8、本方案中的一种基于货物信息的多路况厢式车速度控制方法,通过在厢式车厢体中的绑带上预设测力计,在货物装载完成后实时监测绑带张力变化情况,最终根据绑带张力变化情况判断货物的实时颠簸状态,通过设定相关阈值,可及时判断厢式车进入复杂路况,即行车质量较差路面不平整区域,从而根据路面平整度以及所装载的货物种类特性及时给驾驶员提供最高行车速度,从而保证货物的颠簸程度在合理范围内,避免货物损坏或损毁,提高了货物运输的安全性。
9、作为优选,步骤s1中的绑带类型包括厢体底部固定绑带和/或厢体侧壁固定绑带。
10、通过对厢体内部分布在不同位置的绑带的张力变化进行监测,可根据各个绑带之间的位置关系以及不同的张力变化情况,对厢体内部货物的实时状态进行全面了解。
11、作为优选,步骤s2中货物信息获取过程包括:
12、s21:在货物装载完成后,通过识别扫描货物上的标识获取货物种类特性;
13、s22:根据货物种类特性,获取对应的最大允许颠簸幅度。
14、通过针对不同货物设定相应的最大允许颠簸幅度,可进一步优化兼顾行车运输效率和货物运输安全性,如颠簸易损坏的货物对应较小的最大允许颠簸幅度,则相应的最高行车速度将相对较小,以保证其安全性,抗颠簸能力较强的货物对应较大的最大允许颠簸幅度,则相应的最高行车速度将相对较大,将有更高的运输效率。
15、作为优选,其中步骤s3具体包括:
16、s31:根据货物装载完成后绑带的初始形状分别构建力学模型;
17、s32:根据力学模型和绑带张力变化情况判断货物实时位移幅度;
18、s33:货物位移幅度超过最大允许颠簸幅度时,进入步骤s4。
19、货物装载完成后,通过获取车厢内不同位置绑带初始形状的力学模型,可准确得出绑带张力变化与货物位移幅度的对应关系,从而实现对厢体内货物颠簸程度的准确监测和判断,保证货物运输安全。
20、作为优选,步骤s1中还包括在运送厢体中各个区域预设压力传感器;步骤s2中的最大允许颠簸幅度包括水平方向最大允许颠簸幅度和垂直方向最大允许颠簸幅度;步骤s3还包括:根据厢体内各个区域的压力变化判断货物颠簸方向,货物在水平方向或垂直方向的位移幅度超过对应的最大允许颠簸幅度时,进入步骤s4。
21、通过对厢体内各个区域预设压力传感器,可根据各个区域的压力变化判断厢体内部货物颠簸方向,如各相邻区域内的压力变化较为一致,即同步变大或变小,说明此时颠簸主要在垂直方向,若相邻区域内的压力存在转移趋势,说明此时颠簸主要在水平方向;同时,由于运输货物种类特性的不同,其在水平方向和垂直方向的颠簸对其是否损坏或损毁的影响程度不同,通过在两个方向上分别设定最大允许颠簸幅度,可进一步提高对于货物状态判断的准确性。
22、作为优选,步骤s4具体包括:
23、s41:获取路面倾角和行车速度;
24、s42:根据路面倾角和车速信息计算车辆在水平位移和垂直位移;
25、s43:根据得到的水平位移和垂直位移计算国际平整度指数iri。
26、可根据得到的国际平整度指数对路面情况做出判断,从而对最高行车速度限制做出准确参考。
27、作为优选,步骤s41中的路面倾角根据三轴加速度传感器测量的y轴和z轴的加速度值计算得到。
28、作为优选,步骤s42中水平位移计算公式为垂直位移计算公式为其中v为行车速度,α为路面倾角,δt为整车控制器的运行周期;步骤s43中国际平整度指数计算公式为iri-s2/s1。
29、作为优选,步骤s3中厢体内任一绑带张力超过设定阈值时,进入步骤s4。可保证在复杂路况下的及时进行路面判断,保证全部货物的安全性。
30、作为优选,该控制方法还包括:根据国际平整度指数iri对路面路况进行分级,如根据iri数值大小可将路面分为高速公路、新路面、老旧路面、经常养护的无铺面路面、已有损坏的道路以及不平整的无铺面道路;通过模拟试验,获取不同等级路况下不同车型运输不同货物的最高行车速度,得到不同的路况、车型以及货物种类特性对应的最高行车速度。从而在货物运输过程中面临不同路面时,结合不同的货物种类特性完成准确的最高行车速度限制。
31、本发明具有以下有益效果:能够通过绑带张力变化检测,提高厢体内部货物状态监测的准确性;根据箱体内绑带张力变化情况,及时判断进入复杂路况并完成路面平整度识别,提高的货物运输安全性;能够根据路面状况和所装载的货物种类特性给出最高行车速度限制,兼顾了运输效率和安全性。
- 还没有人留言评论。精彩留言会获得点赞!