一种磁吸附轮总成及装配拆卸方法
本发明属于磁吸附爬壁,尤其涉及一种磁吸附轮总成及装配拆卸方法。
背景技术:
1、磁吸附爬壁机器人是用于导磁性壁面作业的一种机器人,依靠磁力吸附于导磁壁面并在壁面上运动实现作业要求,其中,吸附是该类机器人的关键技术之一。目前磁吸附爬壁机器人上常用的吸附装置为磁吸附轮;该磁吸附轮虽然结构简单,但主要存在以下问题:1)为了保证吸附的稳定可靠性,磁吸附轮的吸附力n一般比较大,同时也增加了将磁吸附轮从被吸附壁面上取下(脱离)的难度。一般需要借助强力将磁吸附轮从被吸附壁面上强行剥离或用反向磁场抵消磁吸附力,这两种方法均存在结构复杂、操作繁琐的问题。2)因为作业面通常为钢材,磁吸附轮与被吸附壁面只能形成点、线接触,钢材之间的摩擦系数很小(0.15,遇到有水或油的情景,可能减为0.05以下),因此容易发生打滑现象;目前主要通过在磁吸附轮外面滚花增大摩擦力或在磁吸附轮外面包胶来克服这种现象,但是滚花设计在钢与钢接触面上防止打滑的效果较差;而包胶的厚度不易掌控,包胶太厚影响磁吸附力,包胶太薄防滑效果差且容易松弛脱落。3)磁吸附轮有强磁性,尤其在用于焊接、清理机器人时,磁吸附轮不可避免要吸附焊渣、铁屑、铁锈等杂物,这些杂物包裹在磁吸附轮上,会破坏吸附稳定性,甚至改变磁吸附轮的外径、破坏运动控制的精度。3)磁吸附轮的强磁吸力非常大,装配时通常需要借助额外的装夹治具才可以操作,且装配时容易夹伤人或将永磁体(脆性材料)击碎;装配过程比较复杂,且装配后不容易拆卸,不便于后期永磁铁的更换和维护,维护成本高。
技术实现思路
1、旨在克服上述现有技术中存在的至少之一处不足,本发明提供了一种磁吸附轮总成,磁吸附力大小可调,便于从工作面上脱离,且结构简单、操作方便。
2、作为同一个技术构思,本发明还提供了一种磁吸附轮总成的装配拆卸方法,拆装简单便携,且安全系数高。
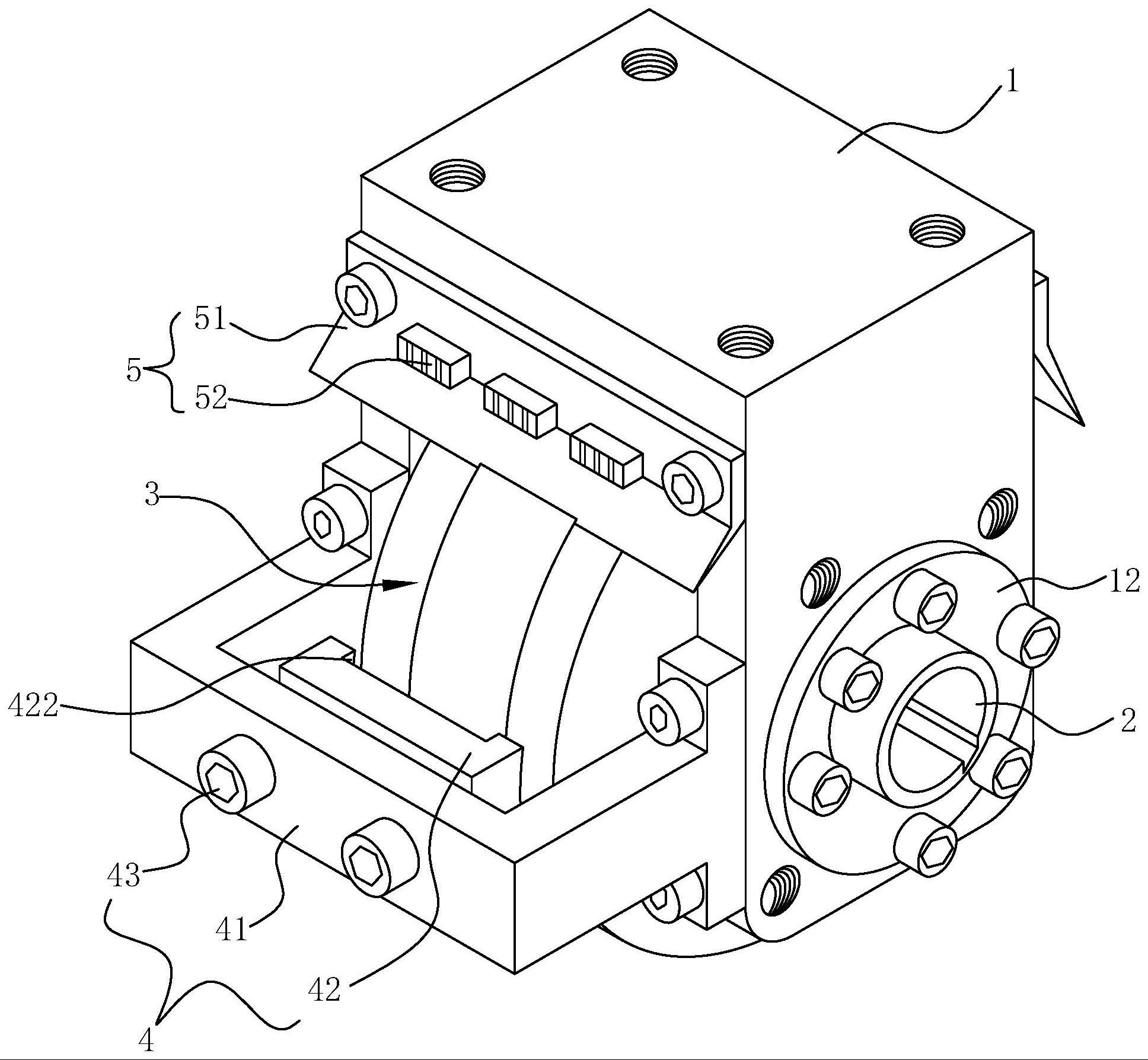
3、为解决上述现有技术中存在的问题,本发明实施例提供了一种磁吸附轮总成,包括支撑架、转动安装在所述支撑架上的回转轴以及随所述回转轴同步转动的磁吸附轮模组;其特征在于,所述磁吸附轮模组包括设置于所述回转轴上的环形定位结构、环设在所述环形定位结构的外周部的永磁体以及两个导磁轮,两个所述导磁轮位于所述永磁体的相对两端且与所述环形定位结构固定连接;
4、所述支撑架上设有用于调节所述导磁轮与作业面之间的磁吸附力的磁吸附力调节装置;所述磁吸附力调节装置包括设置于所述支撑架一侧的安装架、位于所述安装架朝向所述导磁轮一侧的磁短路块以及设置于所述安装架上用于驱使所述磁短路块朝向或背离所述导磁轮方向运动的调节结构。
5、进一步,所述调节结构包括至少两个间隔设置在所述安装架上的调节螺钉,所述调节螺钉的一端与所述磁短路块螺纹连接;所述磁短路块上设有用于与所述导磁轮的外周壁适配抵接的内凹圆弧面和与所述永磁体对应的避让口。
6、进一步,所述导磁轮的径向尺寸比所述永磁体的径向尺寸大1~15mm;
7、所述永磁体的外周部上环设有用于增大与作业面之间摩擦力的柔性套,所述柔性套的径向尺寸比所述导磁轮的径向尺寸大0.1~3mm。
8、进一步,所述支撑架上设有吸附轮清理装置,所述导磁轮转动时,所述吸附轮清理装置用于剥离所述导磁轮的外周部上吸附的杂物并将剥离的所述杂物吸附回收。
9、进一步,所述吸附轮清理装置包括刮刀和磁吸件,所述刮刀包括相连接的固定段和倾斜段,所述固定段安装在所述支撑架上,所述磁吸件安装在所述固定段上;所述倾斜段上设有用于与所述永磁体对应的的缺口部和与所述导磁轮的外周部抵接的刮刀刃,且所述倾斜段的倾斜方向与抵接处所述导磁轮的切线方向呈设定角度。
10、进一步,所述环形定位结构上设有用于对所述永磁体进行轴向限位的环形限位部,临近所述环形限位部的所述导磁轮上设有避让槽;每个所述导磁轮上均设有多个周向间隔排布的安装通孔和多个轴向贯穿且周向间隔排布的紧定螺纹孔;所述紧定螺纹孔与所述环形定位结构的端面对应;所述环形定位结构的两端均设有多个螺纹安装孔;两侧的所述螺纹安装孔与两个所述导磁轮上的所述安装通孔分别一一对应。
11、本发明实施例还提供了一种磁吸附轮总成的装配拆卸方法,用于对所述的磁吸附轮总成进行装配或拆卸;同一所述磁吸附轮模组中设有所述避让槽的所述导磁轮为第一导磁轮,另一个所述导磁轮为第二导磁轮;所述装配拆卸方法包括磁吸附轮模组装配步骤;
12、所述磁吸附轮模组装配步骤包括:
13、s1、将所述永磁体安装在所述环形定位结构上,且所述永磁体的一端面与所述环形限位部抵接;
14、s2、在所述第一导磁轮的所述紧定螺纹孔中旋入紧定螺钉,且使所述紧定螺钉的端部由所述第一导磁轮朝向所述永磁体的一侧伸出设定长度a;
15、s3、将所述紧定螺钉伸出端的端部顶靠在所述环形定位结构的一端面上,然后旋拧所述紧定螺钉,所述第一导磁轮向所述永磁体方向移动并最终与所述永磁体吸附,取下所述紧定螺钉;将第一螺纹连接件穿过所述第一导磁轮的安装通孔与所述环形定位结构上对应的所述螺纹安装孔连接;
16、s4、在所述第二导磁轮的所述紧定螺纹孔中旋入紧定螺钉,且使所述紧定螺钉的端部由所述第二导磁轮朝向所述永磁体的一侧伸出设定长度a;
17、s5、将所述紧定螺钉伸出端的端部顶靠在所述环形定位结构的另一端面上,然后旋拧所述紧定螺钉,所述第二导磁轮向所述永磁体方向移动并最终与所述永磁体吸附,取下所述紧定螺钉;将第二螺纹连接件穿过所述第二导磁轮的安装通孔与所述环形定位结构上对应的所述螺纹安装孔连接。
18、进一步,所述环形定位结构和所述回转轴为一体成型结构;
19、在步骤s2之后、步骤s3之前需要先将所述第一导磁轮套设在所述回转轴上;
20、在步骤s4之后、步骤s5之前需要先将所述第二导磁轮套设在所述回转轴上。
21、进一步,所述环形定位结构与所述回转轴通过键连接;包括轴套和环设于所述轴套上的环形定位本体;所述环形限位部环设在所述环形定位本体的一端的外周部;所述螺纹安装孔设置于所述环形定位本体上;
22、在步骤s2之后、步骤s3之前需要先将所述第一导磁轮套设在所述轴套上;
23、在步骤s4之后、步骤s5之前需要先将所述第二导磁轮套设在所述轴套上。
24、进一步,所述装配拆卸方法还包括磁吸附轮模组拆卸步骤,所述磁吸附轮模组拆卸步骤包括:
25、s6、将所述第一导磁轮和所述环形定位结构上的所述第一螺纹连接件、所述第二导磁轮和所述环形定位结构上的所述第二螺纹连接件取下;
26、s7、借助所述紧定螺钉将所述第二导磁轮从所述环形定位结构上拆下;
27、s8、借助所述紧定螺钉将所述第一导磁轮从所述环形定位结构上拆下;
28、s9、从所述环形定位结构上取下所述永磁体。
29、由于采用了上述技术方案,取得的有益效果如下:
30、本发明中的磁吸附轮总成,包括支撑架、转动安装在支撑架上的回转轴以及随回转轴同步转动的磁吸附轮模组;磁吸附轮模组包括设置于回转轴上的环形定位结构、环设在环形定位结构的外周部的永磁体以及两个导磁轮,两个导磁轮位于永磁体的相对两端且与环形定位结构固定连接;支撑架上设有用于调节导磁轮与作业面之间的磁吸附力的磁吸附力调节装置;磁吸附力调节装置包括设置于支撑架一侧的安装架、位于安装架朝向导磁轮一侧的磁短路块以及设置于安装架上用于驱使磁短路块朝向或背离导磁轮方向运动的调节结构。
31、当需要将磁吸附轮总成牢固吸附在作业面上时,借助调节结构使磁短路块远离导磁轮,此时导磁轮和作业面构成了永磁体从n极到s极之间唯一的磁回路,导磁轮与作业面之间的磁吸附力最大。当需要减小磁吸附力时,借助调节结构使磁短路块逐渐靠近导磁轮的外周部直至接触,磁短路块在导磁轮之间建立起另一条并联磁回路,削弱了导磁轮与作业面之间的磁力线密度,磁吸附力减小,此时磁吸附轮总成便于从作业面上脱离。简言之,本发明利用磁场的“磁阻最小理论”,通过增加并联的磁回路来调节磁吸附力的大小,便于磁吸附轮总成牢固吸附在作业面上或从作业面上轻松脱离。
32、另外,本发明中磁吸附轮总成的装配拆卸方法,仅需借助紧定螺钉和螺纹连接件即可对其中的磁吸附轮模组进行简单快速且无损伤的装配。
- 还没有人留言评论。精彩留言会获得点赞!