一种机电耦合控制方法、系统、设备及介质与流程
本发明涉及机电耦合控制,具体的,本发明应用于分布式电驱车辆领域,特别是涉及一种机电耦合控制方法、系统、设备及介质。
背景技术:
1、目前,现有的分布式电驱车辆的各个驱动轮之间缺乏机械连接,当车辆行驶在两侧路面附着系数不同的对开路面上时,若路面附着系数低侧的驱动轮发生打滑,那么必须通过降低打滑侧车轮的转矩,进而使车轮恢复到正常的状态;进行上述操作时,分布式电驱车辆的动力性能取决于路面附着系数高侧的驱动轮的输出转矩,这样就造成了同轴驱动电机的动力浪费,故整车的驱动能力也随之下降,若此时分布式电驱车辆正行驶在恶劣工况下或处于爬坡状态,那么分布式电驱车辆的整车驱动能力不足就会造成车辆无法通行,这时,就需要通过车辆的机电耦合机构在一定的时间段实现转矩耦合,从而充分利用总驱动能力来提高车辆的通过性和安全性;
2、现有技术中,双电机驱动系统多采用黏性联轴器作为同轴耦合装置,这种方式存在如下缺陷:
3、第一方面,黏性联轴器的响应速度较慢,属于弱耦合;
4、第二方面,黏性联轴器的体积太小,输出剪切的转矩力较小,其对整车的控制效果不太明显;
5、第三方面,黏性联轴器剪切转矩输出特性的影响因素较多,稳定性较差;
6、综上所述,现有技术中对于分布式电驱车辆的耦合控制方式的控制效果较差,控制效率较低,在实际应用时易受多方因素影响。
技术实现思路
1、本发明的目的在于,针对现有技术中的上述问题,提供一种机电耦合控制方法、系统、设备及介质,进而解决现有技术中对于分布式电驱车辆的耦合控制方式的控制效果较差,控制效率较低,在实际应用时易受多方因素影响的问题。
2、为解决上述技术问题,本发明的具体技术方案如下:
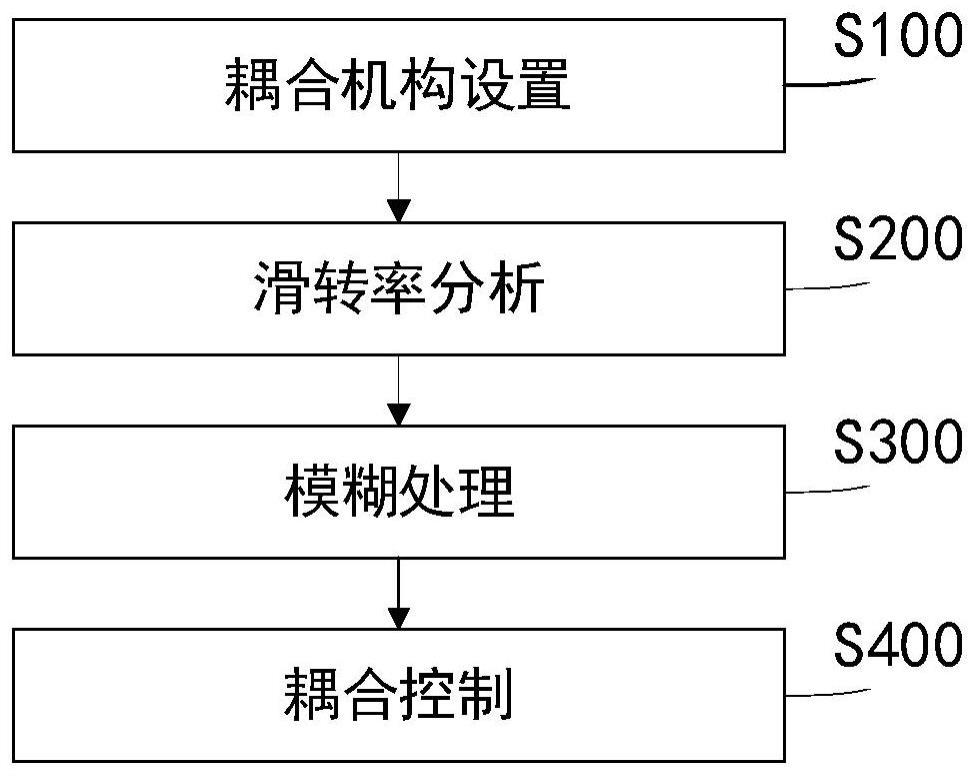
3、一方面,本发明提供一种机电耦合控制方法,包括以下步骤:
4、耦合机构设置:
5、在所述分布式电驱车辆上设置第一耦合模块;
6、滑转率分析:
7、获取所述分布式电驱车辆的行驶关联参数,基于所述行驶关联参数进行滑转率分析,得到滑转率参数;
8、模糊处理:
9、基于所述滑转率参数进行误差模糊处理,得到模糊参数;
10、耦合控制:
11、基于所述模糊参数控制所述第一耦合模块进行转矩耦合。
12、作为一种改进的方案,所述获取所述分布式电驱车辆的行驶关联参数,包括:
13、获取所述分布式电驱车辆的驱动轮行驶参数,基于所述驱动轮行驶参数计算所述分布式电驱车辆的第一滑转率;
14、识别所述分布式电驱车辆的路面附着系数;
15、令所述第一滑转率和所述路面附着系数作为所述行驶关联参数。
16、作为一种改进的方案,所述基于所述行驶关联参数进行滑转率分析,得到滑转率参数,包括:
17、设置路面参数拟合曲线;
18、基于所述路面参数拟合曲线与所述第一滑转率和所述路面附着系数间的相似度,确认与所述第一滑转率和所述路面附着系数均匹配的目标滑转率;
19、设定所述第一滑转率和所述目标滑转率为所述滑转率参数。
20、作为一种改进的方案,所述基于所述滑转率参数进行误差模糊处理,得到模糊参数,包括:
21、设置模糊pid控制器和模糊策略;
22、基于所述第一滑转率、所述目标滑转率、所述模糊pid控制器和所述模糊策略进行误差模糊处理,得到所述模糊参数。
23、作为一种改进的方案,所述基于所述第一滑转率、所述目标滑转率、所述模糊pid控制器和所述模糊策略进行误差模糊处理,得到所述模糊参数,包括:
24、基于所述第一滑转率和所述目标滑转率计算滑转率差值以及差值变化率;
25、将所述滑转率差值和所述差值变化率作为所述模糊pid控制器的输入量进行输入,并按照所述模糊策略对所述模糊pid控制器的模糊控制参数进行调整,得到模糊后控制参数;
26、设定所述模糊后控制参数为所述模糊参数。
27、作为一种改进的方案,所述基于所述模糊参数控制所述第一耦合模块进行转矩耦合,包括:
28、将所述滑转率差值和所述差值变化率作为所述模糊pid控制器的输入量进行输入,并基于所述模糊参数计算所述模糊pid控制器的输出参数;
29、确认所述输出参数对应的pwm波占空比信号;
30、基于所述pwm波占空比信号控制所述第一耦合模块的励磁线圈的电流值;
31、通过控制所述励磁线圈的电流值对所述转矩耦合进行控制。
32、作为一种改进的方案,所述第一耦合模块包括:牙嵌式电磁离合器。
33、另一方面,本发明还提供一种机电耦合控制系统,包括:
34、耦合机构设置单元、滑转率分析单元、模糊处理单元和耦合控制单元;
35、耦合机构设置单元,用于在所述分布式电驱车辆上设置第一耦合模块;
36、滑转率分析单元,用于获取所述分布式电驱车辆的行驶关联参数,并基于所述行驶关联参数进行滑转率分析,得到滑转率参数;
37、模糊处理单元,用于根据所述滑转率参数进行误差模糊处理,得到模糊参数;
38、耦合控制单元,用于根据所述模糊参数控制所述第一耦合模块进行转矩耦合。
39、另一方面,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现所述机电耦合控制方法的步骤。
40、另一方面,本发明还提供一种计算机设备,所述计算机设备包括处理器、通信接口、存储器和通信总线,其中,所述处理器,所述通信接口,所述存储器通过所述通信总线完成相互间的通信;其中:
41、所述存储器,用于存放计算机程序;
42、所述处理器,用于通过运行所述存储器上所存放的程序来执行所述机电耦合控制方法的步骤。
43、本发明技术方案的有益效果是:
44、1、本发明所述的机电耦合控制方法,可以实现通过最优滑转率的预测以及模糊推理的运用,进而对牙嵌式电磁离合器进行精准高效的转矩耦合控制,最终能够使车辆在对开路面发生一侧车轮打滑时,通过转矩耦合控制将打滑侧驱动力传递给未打滑一侧,进而利用未打滑侧路面的高附着力增加车轮的驱动力,从而提高车辆的通过性,且本发明中的耦合控制响应速度快,控制效果好,能够实现及时的转矩控制,具有极高的应用价值,弥补了现有技术的不足。
45、2、本发明所述的机电耦合控制系统,可以通过耦合机构设置单元、滑转率分析单元、模糊处理单元和耦合控制单元的相互配合,进而实现通过最优滑转率的预测以及模糊推理的运用,进而对牙嵌式电磁离合器进行精准高效的转矩耦合控制,最终能够使车辆在对开路面发生一侧车轮打滑时,通过转矩耦合控制将打滑侧驱动力传递给未打滑一侧,进而利用未打滑侧路面的高附着力增加车轮的驱动力,从而提高车辆的通过性,且本发明中的耦合控制响应速度快,控制效果好,能够实现及时的转矩控制,具有极高的应用价值,弥补了现有技术的不足。
46、3、本发明所述的计算机可读存储介质,可以实现引导耦合机构设置单元、滑转率分析单元、模糊处理单元和耦合控制单元进行配合,进而实现本发明所述的机电耦合控制方法,且本发明所述的计算机可读存储介质还有效提高所述机电耦合控制方法的可操作性。
47、4、本发明所述的计算机设备,可以实现存储并执行所述计算机可读存储介质,进而实现本发明所述的机电耦合控制方法。
- 还没有人留言评论。精彩留言会获得点赞!