一种无人驾驶增加安全性的方法及系统与流程
本发明涉及无人驾驶,具体而言,涉及一种无人驾驶增加安全性的方法及系统。
背景技术:
1、无人驾驶汽车集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物,为车辆带来了空前的变革,在增强高速公路安全、缓解交通拥堵、减少空气污染等方面,无人驾驶技术带来了颠覆性的改善。
2、现有的无人驾驶技术是利用传感器感应障碍物的距离或者通过图像采集设备采集车辆周围环境图像,并根据所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够自动在道路上行驶。但是由于现有技术是通过传感器进行感应或图像采集设备进行采集,则在应对突发状况(例如道路上出现刚修的水泥地)或者车流人流大的情况下,车辆的车载传感器收到数据,经过处理器判断再发出控制指令,导致车辆反应速度较慢,容易出现安全问题,则容易导致车冲撞到人。由此可见,目前自动驾驶技术仍不完善,存在安全风险,亟需一种无人驾驶增加安全性的方法及系统提高自动驾驶技术的安全性。
技术实现思路
1、本发明的目的在于提供一种无人驾驶增加安全性的方法及系统,其能够给目标无人驾驶车辆预警的同时,有效避免目标无人驾驶车辆冲撞到待躲避物体,让无人驾驶车辆行驶更加安全,有效完善了自动驾驶技术,提高了自动驾驶技术的安全性。
2、为解决上述技术问题,本发明采用的技术方案为:
3、第一方面,本技术实施例提供一种无人驾驶增加安全性的方法,其包括如下步骤:
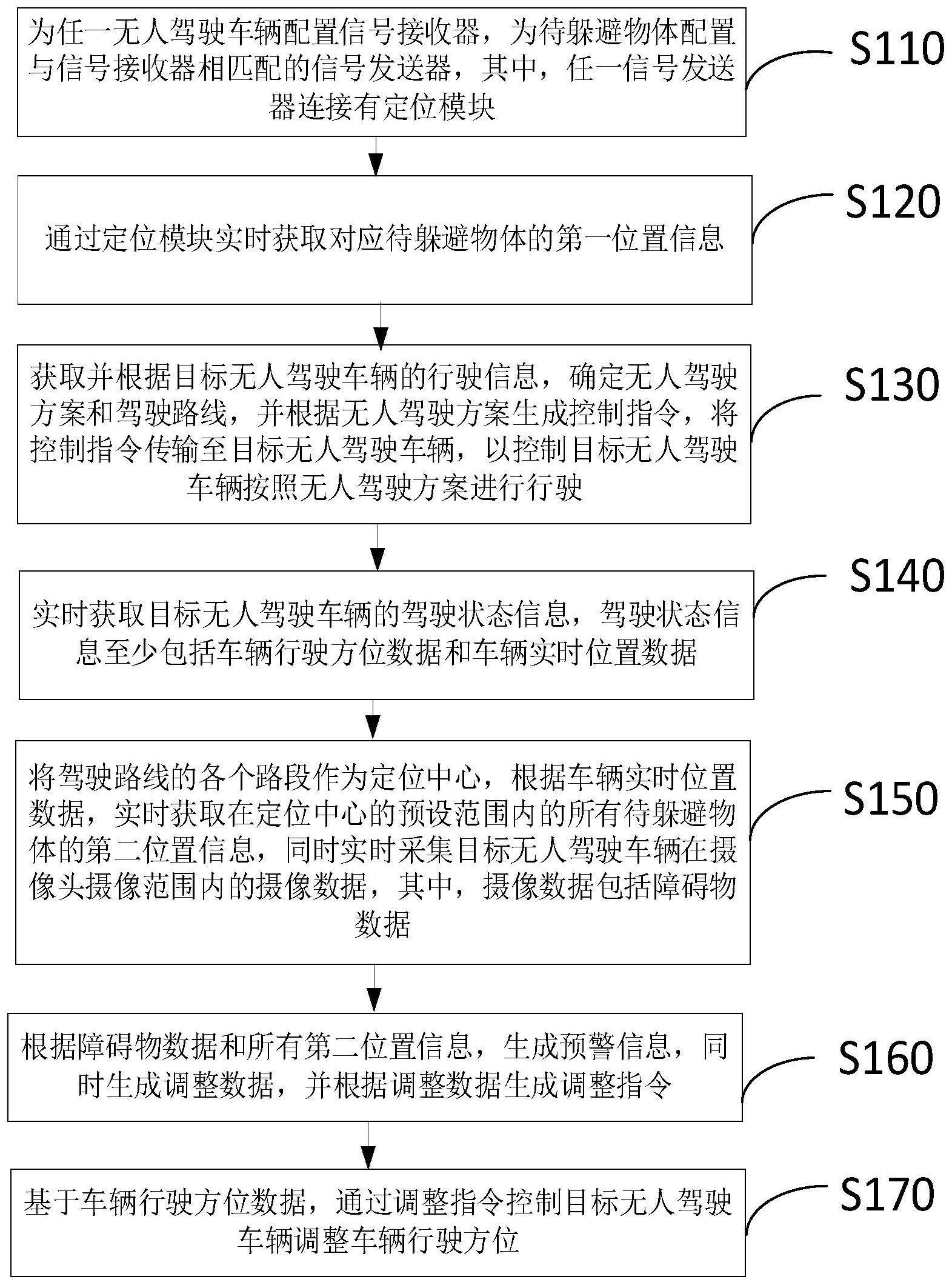
4、为任一无人驾驶车辆配置信号接收器,为待躲避物体配置与信号接收器相匹配的信号发送器,其中,任一信号发送器连接有定位模块;
5、通过定位模块实时获取对应待躲避物体的第一位置信息;
6、获取并根据目标无人驾驶车辆的行驶信息,确定无人驾驶方案和驾驶路线,并根据无人驾驶方案生成控制指令,将控制指令传输至目标无人驾驶车辆,以控制目标无人驾驶车辆按照无人驾驶方案进行行驶;
7、实时获取目标无人驾驶车辆的驾驶状态信息,驾驶状态信息至少包括车辆行驶方位数据和车辆实时位置数据;
8、将驾驶路线的各个路段作为定位中心,根据车辆实时位置数据,实时获取在定位中心的预设范围内的所有待躲避物体的第二位置信息,同时实时采集目标无人驾驶车辆在摄像头摄像范围内的摄像数据,其中,摄像数据包括障碍物数据;
9、根据障碍物数据和所有第二位置信息,生成预警信息,同时生成调整数据,并根据调整数据生成调整指令;
10、基于车辆行驶方位数据,通过调整指令控制目标无人驾驶车辆调整车辆行驶方位。
11、在本发明的一些实施例中,上述无人驾驶增加安全性的方法还包括:
12、响应用户操作,预先设置不同种类物体的躲避优先等级;
13、通过定位模块实时获取对应待躲避物体的第一位置信息的同时,根据各个待躲避物体的躲避优先等级,对对应第一位置信息进行标识。
14、在本发明的一些实施例中,上述根据障碍物数据和所有第二位置信息,生成预警信息,同时生成调整数据的步骤包括:
15、根据所有第二位置信息,确定各个第二位置信息对应的待躲避物体的躲避优先等级;
16、根据障碍物数据和各个待躲避物体的躲避优先等级,生成避让模拟路线;
17、将避让模拟路线与驾驶路线进行对比,得到路线差异结果,并根据路线差异结果,生成调整数据。
18、在本发明的一些实施例中,上述行驶信息包括始发地信息、终点信息和道路状态信息;
19、上述根据目标无人驾驶车辆的行驶信息,确定驾驶路线的步骤包括:
20、根据始发地信息和终点信息,从三维电子地图数据库中获得对应的三维地图;
21、根据道路状态信息,确定可行驶道路,并在三维地图中标记出可行驶道路;
22、根据该三维地图中标记的可行驶道路,得到驾驶路线。
23、在本发明的一些实施例中,上述无人驾驶增加安全性的方法还包括:
24、建立无人驾驶车辆控制系统与信号发送器的连接;
25、通过无人驾驶车辆控制系统接收信号发送器发送的第一位置信息。
26、第二方面,本技术实施例提供一种无人驾驶增加安全性的系统,其包括:
27、信号收发器配置模块,用于为任一无人驾驶车辆配置信号接收器,为待躲避物体配置与信号接收器相匹配的信号发送器,其中,任一信号发送器连接有定位模块;
28、定位获取模块,用于通过定位模块实时获取对应待躲避物体的第一位置信息;
29、行驶控制模块,用于获取并根据目标无人驾驶车辆的行驶信息,确定无人驾驶方案和驾驶路线,并根据无人驾驶方案生成控制指令,将控制指令传输至目标无人驾驶车辆,以控制目标无人驾驶车辆按照无人驾驶方案进行行驶;
30、驾驶状态信息获取模块,用于实时获取目标无人驾驶车辆的驾驶状态信息,驾驶状态信息至少包括车辆行驶方位数据和车辆实时位置数据;
31、摄像采集模块,用于将驾驶路线的各个路段作为定位中心,根据车辆实时位置数据,实时获取在定位中心的预设范围内的所有待躲避物体的第二位置信息,同时实时采集目标无人驾驶车辆在摄像头摄像范围内的摄像数据,其中,摄像数据包括障碍物数据;
32、调整指令生成模块,用于根据障碍物数据和所有第二位置信息,生成预警信息,同时生成调整数据,并根据调整数据生成调整指令;
33、车辆行驶方位调整模块,用于基于车辆行驶方位数据,通过调整指令控制目标无人驾驶车辆调整车辆行驶方位。
34、第三方面,本技术实施例提供一种电子设备,其包括存储器,用于存储一个或多个程序;处理器。当一个或多个程序被处理器执行时,实现如上述第一方面中任一项的方法。
35、第四方面,本技术实施例提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述第一方面中任一项的方法。
36、相对于现有技术,本发明的实施例至少具有如下优点或有益效果:
37、本发明提出了一种无人驾驶增加安全性的方法及系统,其包括如下步骤:为任一无人驾驶车辆配置信号接收器,为待躲避物体配置与信号接收器相匹配的信号发送器,其中,任一信号发送器连接有定位模块。通过信号发送器发送定位信号给信号接收器,以使无人驾驶车辆实时接收到所有待躲避物体的定位信号。进而建立待躲避物体与无人驾驶车辆之间的联系,为这些待躲避物体增添了防护手段,以便于后续无人驾驶车辆对待躲避物体进行避让。通过定位模块实时获取对应待躲避物体的第一位置信息。获取并根据目标无人驾驶车辆的行驶信息,确定无人驾驶方案和驾驶路线,并根据无人驾驶方案生成控制指令,将控制指令传输至目标无人驾驶车辆,以控制目标无人驾驶车辆按照无人驾驶方案进行行驶。实时获取目标无人驾驶车辆的驾驶状态信息,驾驶状态信息至少包括车辆行驶方位数据和车辆实时位置数据。将驾驶路线的各个路段作为定位中心,根据车辆实时位置数据,实时获取在定位中心的预设范围内的所有待躲避物体的第二位置信息,同时实时采集目标无人驾驶车辆在摄像头摄像范围内的摄像数据,其中,摄像数据包括障碍物数据。从而实现了获取在驾驶路线上的待躲避物体的信号反馈信息以及获取目标无人驾驶车辆的摄像头可视范围内的障碍物数据的目的。根据障碍物数据和所有第二位置信息,生成预警信息,同时生成调整数据,并根据调整数据生成调整指令。基于车辆行驶方位数据,通过调整指令控制目标无人驾驶车辆调整车辆行驶方位。实现了给目标无人驾驶车辆预警的同时,有效避免了目标无人驾驶车辆冲撞到待躲避物体,让无人驾驶车辆行驶更加安全,也就有效完善了自动驾驶技术,提高了自动驾驶技术的安全性。
- 还没有人留言评论。精彩留言会获得点赞!