增程式电动车的充电控制方法、系统及计算机可读介质与流程
本发明主要涉及增程式电动车控制,具体地涉及一种增程式电动车的充电控制方法、系统及计算机可读介质。
背景技术:
1、增程式电动车已成为消费者购车的新选择,增程式电动车在电池电量不足的情况下可以使用燃油进行电能补给。现有的增程式电动车的工作模式一般包括纯电优先模式以及燃油优先模式,在电池电量充足时,电动车用户可以使用纯电优先模式,在电池电量可能不足时,电动车用户可以使用燃油优先模式,增程式电动车使用增程器发电以提供电池能量。通常纯电优先模式和燃油优先模式均设置有增程器的启动下限值,例如在燃油优先模式下,当电池的荷电状态(state of charge,soc)值小于等于50%时会启动增程器,在纯电优先模式下,当电池的soc值小于等于20%时会启动增程器。
2、对于增程式电动车的用户来说,最佳的用车状态是在行驶过程中尽量不启动增程器用燃油发电,例如在高速路或者市区行驶过程中,当驾驶的车辆到达充电站时,电池的soc值尽可能接近0,即纯电续航里程刚好支持车辆到达目的地,这样可以降低用车成本。由于现有技术的增程式电动车根据固定的电池soc值来控制增程器发电,即便用户判断剩余电量足够到达目的地,当电池soc值达到增程器的启动下限值时,增程器仍然会启动以持续发电,用户无法主动控制增程器停机,存在用车成本较高的问题。
技术实现思路
1、本申请所要解决的技术问题是提供一种增程式电动车的充电控制方法、系统及计算机可读介质,可以尽可能不启动增程器发电,降低用车成本。
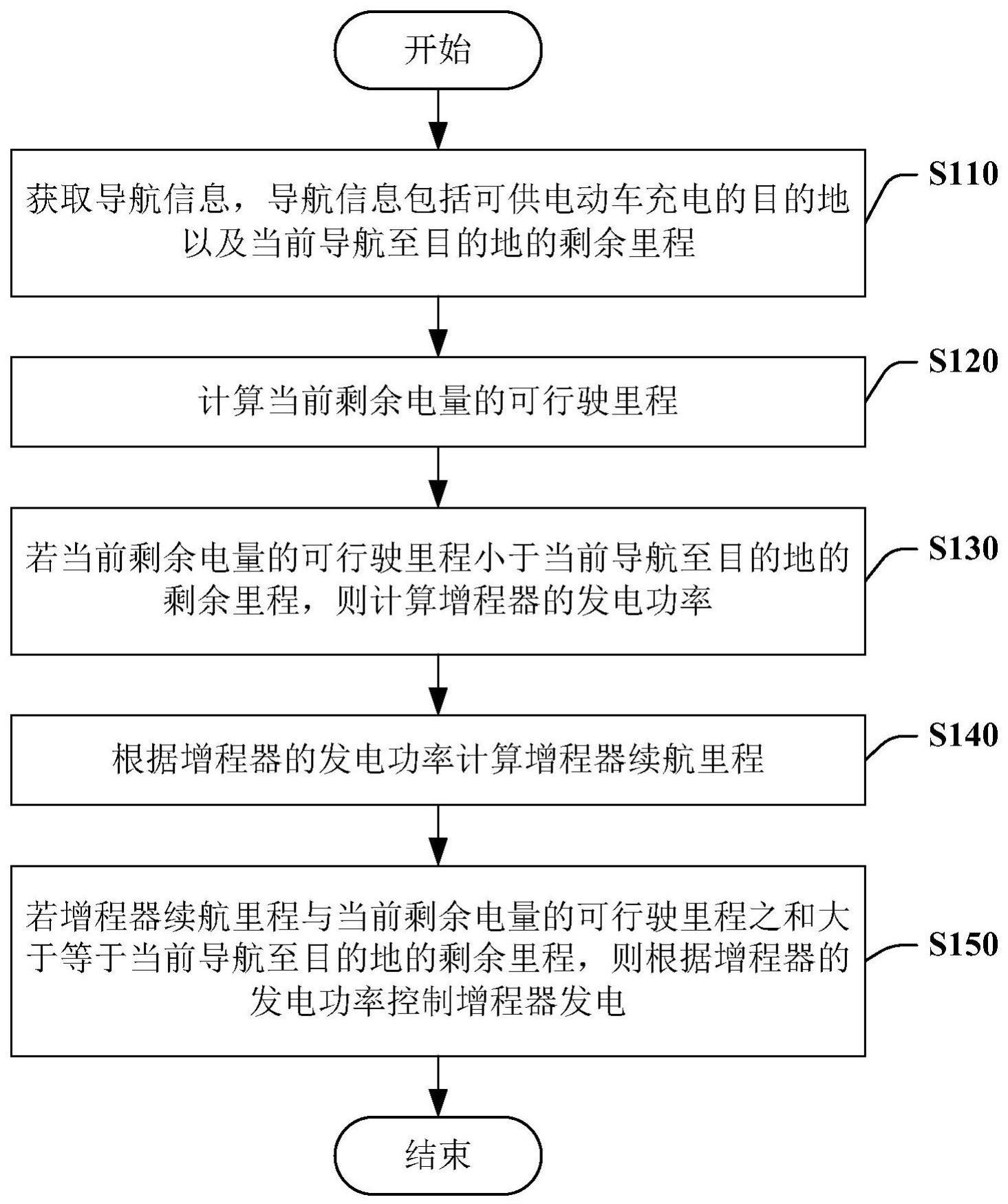
2、本申请为解决上述技术问题而采用的技术方案是一种增程式电动车的充电控制方法,包括:获取导航信息,导航信息包括可供电动车充电的目的地以及当前导航至目的地的剩余里程;计算当前剩余电量的可行驶里程;若当前剩余电量的可行驶里程大于等于当前导航至目的地的剩余里程,则控制增程器不发电;若当前剩余电量的可行驶里程小于当前导航至目的地的剩余里程,则计算增程器的发电功率;根据增程器的发电功率计算增程器续航里程;若增程器续航里程与当前剩余电量的可行驶里程之和大于等于当前导航至目的地的剩余里程,则根据增程器的发电功率控制增程器发电。
3、在本申请的一实施例中,计算当前剩余电量的可行驶里程的步骤包括:根据增程式电动车的历史平均能耗值和当前剩余电量计算当前剩余电量的可行驶里程。
4、在本申请的一实施例中,计算当前剩余电量的可行驶里程的步骤包括:加权计算增程式电动车的历史平均能耗值以及增程式电动车的最近百公里平均能耗值,获得加权平均能耗值;根据加权平均能耗值和当前剩余电量计算当前剩余电量的可行驶里程。
5、在本申请的一实施例中,在加权计算的步骤中,增程式电动车的历史平均能耗值的权重系数为a,增程式电动车的最近百公里平均能耗值的权重系数为b,权重系数a和权重系数b满足关系式:a+b=1。
6、在本申请的一实施例中,使用下面的公式计算增程器的发电功率p:
7、p=p驱动电机+p空调系统+p直流变换器
8、其中,p驱动电机表示驱动电机功率,p空调系统表示空调系统功率,p直流变换器表示直流变换器功率。
9、在本申请的一实施例中,增程器的发电功率p小于等于当前车速对应的最大限制发电功率。
10、在本申请的一实施例中,增程器的发电功率p小于等于预设限制保护功率,预设限制保护功率大于等于当前车速对应的最大限制发电功率。
11、在本申请的一实施例中,预设限制保护功率为40kw。
12、在本申请的一实施例中,在根据增程器的发电功率计算增程器续航里程的步骤之后,还包括:若增程器续航里程与当前剩余电量的可行驶里程之和小于当前导航至目的地的剩余里程,则重新计算增程器的发电功率。
13、在本申请的一实施例中,导航信息还包括当前导航至目的地的剩余时间,根据增程器的发电功率计算增程器续航里程的步骤包括:根据增程器的发电功率和当前导航至目的地的剩余时间计算增程器续航里程。
14、在本申请的一实施例中,在根据增程器的发电功率控制增程器发电的步骤之后,还包括:在增程器的发电过程中,若当前剩余电量的可行驶里程大于等于当前导航至目的地的剩余里程,则控制增程器停止发电。
15、在本申请的一实施例中,在获取导航信息的步骤中,若导航信息包括可供电动车充电的目的地以及当前导航至目的地的剩余里程,则开启自动充电模式。
16、在本申请的一实施例中,若增程式电动车已接通充电装置,或者若当前剩余燃油使增程器续航里程无法支持增程式电动车到达目的地,则结束自动充电模式。
17、本申请为解决上述技术问题还提出一种增程式电动车的充电控制系统,包括:存储器,用于存储可由整车控制器执行的指令;整车控制器,分别与通讯模块、电池管理系统、座舱域控制器以及增程器电连接,整车控制器用于执行指令以实现如上的增程式电动车的充电控制方法。
18、本申请为解决上述技术问题还提出一种存储有计算机程序代码的计算机可读介质,计算机程序代码在由整车控制器执行时实现如上的增程式电动车的充电控制方法。
19、本申请的技术方案结合导航信息来计算增程器的启停时间,获取的导航信息包括可供电动车充电的目的地,这样可以保证增程式电动车在到达目的地时有充电装置可供充电续航,避免驾车过程中由于电量和燃油同时不足而导致车辆无法行驶的情况,提高了用户驾车的安全性;导航信息中包括当前导航至目的地的剩余里程,可以结合该信息实时判断增程式电动车需要充电的时机;通过判断当前剩余电量的可行驶里程与当前导航至目的地的剩余里程之间的大小关系,当剩余电量无法支撑车辆到达目的地时,计算增程器的发电功率和增程器续航里程,若增程器续航里程可以支持车辆到达目的地,则根据计算出的增程器发电功率控制增程器发电。本申请的充电控制方法可以根据驾驶目的地自动计算增程器的启停时间,在保证车辆能够到达目的地的前提下尽可能不启动增程器发电,降低了用车成本,可以智能化地控制增程式电动车充电。
技术特征:
1.一种增程式电动车的充电控制方法,其特征在于,包括:
2.如权利要求1所述的充电控制方法,其特征在于,所述计算当前剩余电量的可行驶里程的步骤包括:根据所述增程式电动车的历史平均能耗值和所述当前剩余电量计算所述当前剩余电量的可行驶里程。
3.如权利要求1所述的充电控制方法,其特征在于,所述计算当前剩余电量的可行驶里程的步骤包括:加权计算所述增程式电动车的历史平均能耗值以及所述增程式电动车的最近百公里平均能耗值,获得加权平均能耗值;
4.如权利要求3所述的充电控制方法,其特征在于,在所述加权计算的步骤中,所述增程式电动车的历史平均能耗值的权重系数为a,所述增程式电动车的最近百公里平均能耗值的权重系数为b,所述权重系数a和所述权重系数b满足关系式:a+b=1。
5.如权利要求1所述的充电控制方法,其特征在于,使用下面的公式计算所述增程器的发电功率p:
6.如权利要求5所述的充电控制方法,其特征在于,所述增程器的发电功率p小于等于当前车速对应的最大限制发电功率。
7.如权利要求6所述的充电控制方法,其特征在于,所述增程器的发电功率p小于等于预设限制保护功率,所述预设限制保护功率大于等于所述当前车速对应的最大限制发电功率。
8.如权利要求7所述的充电控制方法,其特征在于,所述预设限制保护功率为40kw。
9.如权利要求1所述的充电控制方法,其特征在于,在根据所述增程器的发电功率计算增程器续航里程的步骤之后,还包括:若所述增程器续航里程与所述当前剩余电量的可行驶里程之和小于所述当前导航至目的地的剩余里程,则重新计算所述增程器的发电功率。
10.如权利要求1所述的充电控制方法,其特征在于,所述导航信息还包括当前导航至目的地的剩余时间,根据所述增程器的发电功率计算增程器续航里程的步骤包括:根据所述增程器的发电功率和所述当前导航至目的地的剩余时间计算所述增程器续航里程。
11.如权利要求1所述的充电控制方法,其特征在于,在根据所述增程器的发电功率控制所述增程器发电的步骤之后,还包括:在所述增程器的发电过程中,若所述当前剩余电量的可行驶里程大于等于所述当前导航至目的地的剩余里程,则控制所述增程器停止发电。
12.如权利要求1所述的充电控制方法,其特征在于,在获取导航信息的步骤中,若所述导航信息包括可供电动车充电的目的地以及当前导航至目的地的剩余里程,则开启自动充电模式。
13.如权利要求12所述的充电控制方法,其特征在于,若所述增程式电动车已接通充电装置,或者若当前剩余燃油使所述增程器续航里程无法支持所述增程式电动车到达所述目的地,则结束所述自动充电模式。
14.一种增程式电动车的充电控制系统,其特征在于,包括:
15.一种存储有计算机程序代码的计算机可读介质,其特征在于,所述计算机程序代码在由整车控制器执行时实现如权利要求1-13任一项所述的充电控制方法。
技术总结
本发明涉及一种增程式电动车的充电控制方法、系统及计算机可读介质,该充电控制方法包括:获取导航信息,导航信息包括可供电动车充电的目的地以及当前导航至目的地的剩余里程;计算当前剩余电量的可行驶里程;判断当前剩余电量的可行驶里程是否大于等于当前导航至目的地的剩余里程,若是,则控制增程器不发电,若否,则计算增程器的发电功率;根据增程器的发电功率计算增程器续航里程;若增程器续航里程与当前剩余电量的可行驶里程之和大于等于当前导航至目的地的剩余里程,则根据增程器的发电功率控制增程器发电。本发明可以根据驾驶目的地自动计算增程器的启停时间,可以保证车辆能够到达目的地且尽可能不启动增程器发电,降低了用车成本。
技术研发人员:李璞,李陈勇,刘小飞
受保护的技术使用者:合众新能源汽车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!