一种执行器的零位自学习方法及相关装置与流程
本技术涉及车辆,尤其涉及一种汽车执行器的零位自学习方法、装置、电子控制单元、车辆、计算机可读存储介质以及计算机程序产品。
背景技术:
1、执行器是自动控制系统中的组成部分,可以包括气动执行器、液动执行器和电动执行器三个类别。其中,电动执行器多用于车辆技术领域。电动执行器可以根据电子控制单元(electronic control unit,ecu)的指令,带动外部运动机构达到相应位置。
2、外部运动机构的运动范围由机械上、下止点确定。在实际使用中,为了避免外部运动机构频繁触碰机械上、下止点而导致磨损,车辆制造商通常会根据产品性能,将机械上止点和机械下止点中的某一点确定为零位软止点,并以零位软止点为零点,控制外部运动机构的运动。
3、然而,在上述方法中,同一批产品的零位软止点相同,难以满足每个产品的个体化差异,从而增加了开发难度和标定难度。
技术实现思路
1、本技术提供了一种执行器的零位自学习方法,该方法能够更新执行器的零位软止点,从而延长执行器的使用寿命,减轻发动机的标定工作。本技术还提供了上述方法对应的装置、电子控制单元、车辆、计算机可读存储介质以及计算机程序产品。
2、第一方面,本技术提供了一种执行器的零位自学习方法。所述方法包括:
3、获取执行器的第一机械止点值,所述第一机械止点值为所述执行器当次执行自清洁动作的机械止点值;
4、根据所述第一机械止点值和所述执行器的安全余量值,更新所述执行器的零位软止点值。
5、在一些可能的实现方式中,所述方法还包括:
6、获取所述执行器的第二机械止点值,所述第二机械止点值为所述执行器首次执行自清洁动作的机械止点值;
7、根据所述第二机械止点值和零位软止点名义值,确定所述执行器的安全余量值,所述零位软止点名义值预先存储在所述执行器中。
8、在一些可能的实现方式中,所述方法还包括:
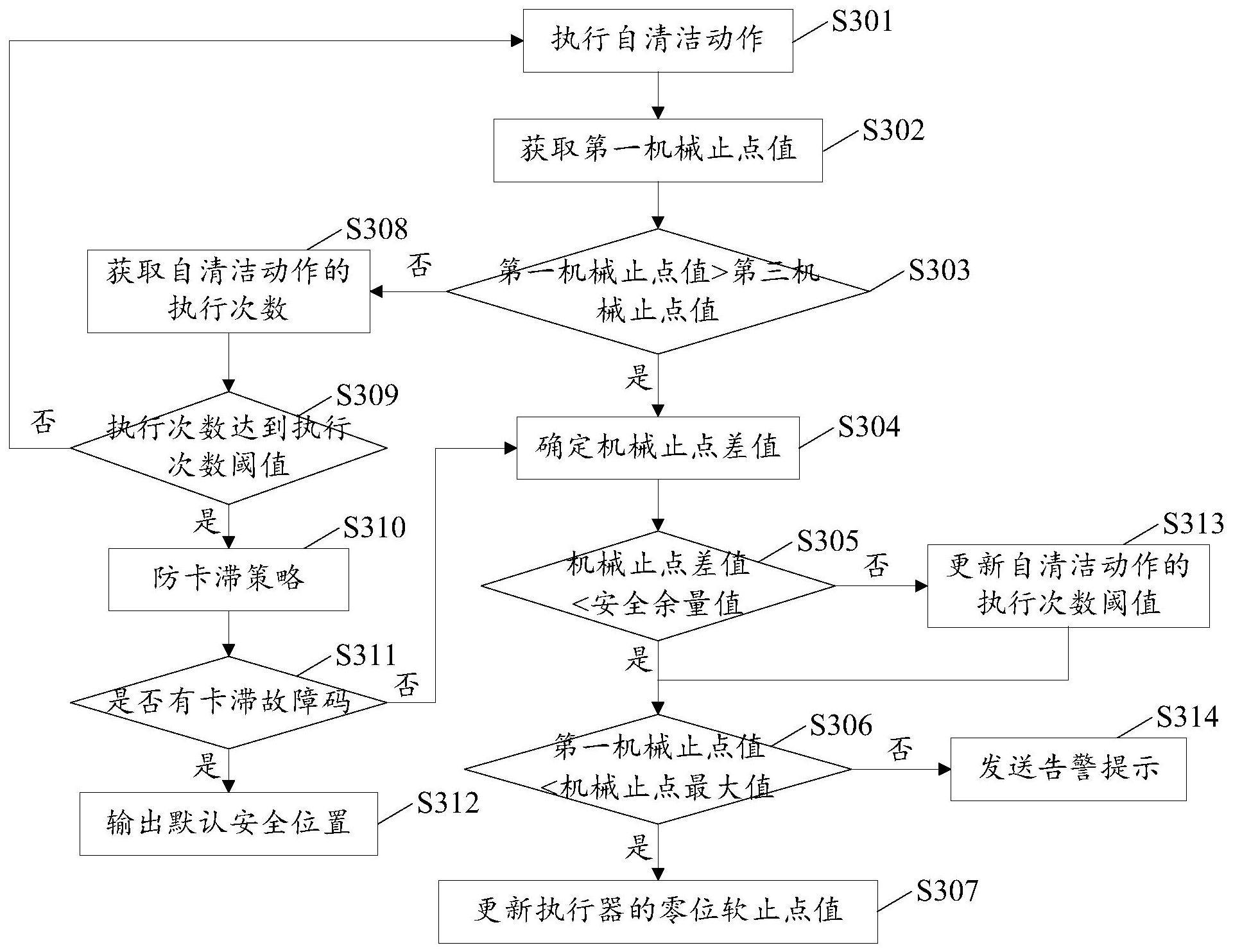
9、根据所述第一机械止点值,确定所述执行器的工作状态;
10、所述根据所述第一机械止点值和所述执行器的安全余量值,更新所述执行器的零位软止点值,包括:
11、当所述执行器处于正常工作状态,根据所述第一机械止点值和所述执行器的安全余量值,更新所述执行器的零位软止点值。
12、在一些可能的实现方式中,所述根据所述第一机械止点值,确定所述执行器的工作状态,包括:
13、比较所述第一机械止点值和第三机械止点值,确定所述执行器的第一工作状态,所述第三机械止点值为所述执行器上一次执行自清洁动作的机械止点值;
14、比较所述第一机械止点值和机械止点最大值,确定所述执行器的第二工作状态,所述机械止点最大值为所述执行器在历史时间段内执行自清洁动作的多个机械止点值中的最大值;
15、当所述第一工作状态和所述第二工作状态均正常,所述执行器处于正常工作状态,否则,所述执行器处于故障工作状态。
16、在一些可能的实现方式中,当所述第一工作状态为非正常,所述方法还包括:
17、控制所述执行器重复执行自清洁动作,直到所述第一工作状态为正常,或者所述自清洁动作的执行次数达到预设的执行次数阈值。
18、在一些可能的实现方式中,当所述第二工作状态为非正常,所述方法还包括:
19、向用户发送告警提示。
20、在一些可能的实现方式中,所述方法还包括:
21、根据所述第一机械止点值和所述第三机械止点值,确定所述执行器的机械止点差值;
22、比较所述机械止点差值与所述安全余量值,更新所述执行器执行自清洁动作的执行次数阈值。
23、第二方面,本技术提供了一种执行器的零位自学习装置。所述装置包括:
24、获取模块,用于获取执行器的第一机械止点值,所述第一机械止点值为所述执行器执行当次自清洁动作的机械止点值;
25、更新模块,用于根据所述第一机械止点值和所述执行器的安全余量值,更新所述执行器的零位软止点值。
26、在一些可能的实现方式中,所述装置还包括:
27、安全余量确定模块,用于获取所述执行器的第二机械止点值,所述第二机械止点值为所述执行器首次执行自清洁动作的机械止点值;根据所述第二机械止点值和零位软止点名义值,确定所述执行器的安全余量值,所述零位软止点名义值预先存储在所述执行器中。
28、在一些可能的实现方式中,所述装置还包括:
29、工作状态判断模块,用于根据所述第一机械止点值,确定所述执行器的工作状态;
30、所述更新模块具体用于:
31、当所述执行器处于正常工作状态,根据所述第一机械止点值和所述执行器的安全余量值,更新所述执行器的零位软止点值。
32、在一些可能的实现方式中,所述工作状态判断模块具体用于:
33、比较所述第一机械止点值和第三机械止点值,确定所述执行器的第一工作状态,所述第三机械止点值为所述执行器上一次执行自清洁动作的机械止点值;
34、比较所述第一机械止点值和机械止点最大值,确定所述执行器的第二工作状态,所述机械止点最大值为所述执行器在历史时间段内执行自清洁动作的多个机械止点值中的最大值;
35、当所述第一工作状态和所述第二工作状态均正常,所述执行器处于正常工作状态,否则,所述执行器处于故障工作状态。
36、在一些可能的实现方式中,当所述第一工作状态为非正常,所述装置还包括:
37、自清洁模块,用于控制所述执行器重复执行自清洁动作,直到所述第一工作状态为正常,或者所述自清洁动作的执行次数达到预设的执行次数阈值。
38、在一些可能的实现方式中,当所述第二工作状态为非正常,所述装置还包括:
39、告警模块,用于向用户发送告警提示。
40、在一些可能的实现方式中,所述自清洁模块还用于:
41、根据所述第一机械止点值和所述第三机械止点值,确定所述执行器的机械止点差值;
42、比较所述机械止点差值与所述安全余量值,更新所述执行器执行自清洁动作的执行次数阈值。
43、第三方面,本技术提供了一种电子控制单元。所述电子控制单元包括处理器和存储器,所述存储器中存储有指令,所述处理器执行所述指令,使得所述电子控制单元执行上述第一方面或第一方面的任一种实现方式所述的方法。
44、第四方面,本技术提供了一种车辆。所述车辆包括上述第三方面所述的电子控制单元。
45、第五方面,本技术提供了一种计算机可读存储介质。所述计算机可读存储介质中存储有指令,当其在车辆故障监测系统上运行时,使得所述车辆故障监测系统执行上述第一方面或第一方面的任一种实现方式所述的方法。
46、第六方面,本技术提供了一种计算机程序产品。所述计算机程序产品包括计算机可读指令,当其在车辆故障监测系统上运行时,使得所述车辆故障监测系统执行上述第一方面或第一方面的任一种实现方式所述的方法。
47、本技术在上述各方面提供的实现方式的基础上,还可以进行进一步组合以提供更多实现方式。
48、基于上述内容描述,可知本技术的技术方案具有如下有益效果:
49、具体地,该方法首先获取执行器的第一机械止点值,其中,第一机械止点值为执行器当次执行自清洁动作的机械止点值,接着根据第一机械止点值和该执行器的安全余量值,更新执行器的零位软止点值。该方法利用执行器当前的机械止点值更新零位软止点值,以实现零位自学习,使得执行器的零位软止点根据执行器的使用情况动态更新,从而延长执行器的使用寿命,并减轻发动机的标定工作。
- 还没有人留言评论。精彩留言会获得点赞!