行车轨迹确定方法及装置、电子设备及可读存储介质与流程
本发明涉及车辆驾驶,具体而言,涉及一种行车轨迹确定方法及装置、电子设备及可读存储介质。
背景技术:
1、随着汽车智能驾驶技术的不断发展进步,高级辅助驾驶的整车装配率也逐年升高,aeb(自动紧急刹车系统,autonomous emergency braking)作为高级辅助驾驶普及的功能之一,是行车adas(高级驾驶辅助系统,advanced driving assistance system)的安全备份,其性能好坏直接关乎着乘客的生命安全。
2、现有的自车轨迹预测方法,主要分为2大类:一种是使用gps(全球定位系统,global positioning system)或者车载高精度地图等导航系统,周期性提供自车的定位信息,利用过去一段时间内的采样点进行曲线拟合,预测自车未来一段时间的运动轨迹,但该预测方法存在强依赖性,在gps信号弱或者接收不到信号的地区,且缺少高精度地图的情况下,自车轨迹的预测结果会有较大偏差甚至无法使用;而且增加了定位导航设备,提高了附加成本。
3、另一种是使用自车的运动状态信息,根据车辆的运动方式,采用不同的运动学公式推算自车一段时间内的运动,例如在直道中采用匀加速直线运动模型预测,在弯道中采用匀加速圆周运动模型预测。但该方法采用的曲率为自车当前时刻的曲率,在变曲率路径中或者曲率突变处(入弯、出弯),计算出的预测轨迹不符合驾驶员的驾驶意图,容易导致辅助驾驶功能异常。
4、在一个现有技术的应用场景中,如图1所示的自车入弯轨迹示意图,入弯前自车直行(曲率为0),以匀加速直线运动预测自车的运动轨迹,如图1中半划线所示。但实际自车将来会沿着道路左转,如图1中点线所示。图1中目标obj可能会被误选为aeb的作用目标。
5、在另一个现有技术的应用场景中,如图2所示的自车出弯轨迹示意图,自车以出弯时的曲率预测自车圆周运动的行驶轨迹,如图2中半划线所示。但实际自车将出弯做直线运动,如图2中点线所示。图2中目标obj可能会被误选为aeb的作用目标。
6、可见,相关技术中在实际弯道工况下,预测得到的自车运动轨迹不够准确。
技术实现思路
1、本发明实施例提供了一种行车轨迹确定方法及装置、电子设备及可读存储介质,以至少解决由于在弯道工况下预测得到行车轨迹不符合驾驶员驾驶意图,行车轨迹不准确的问题的技术问题。
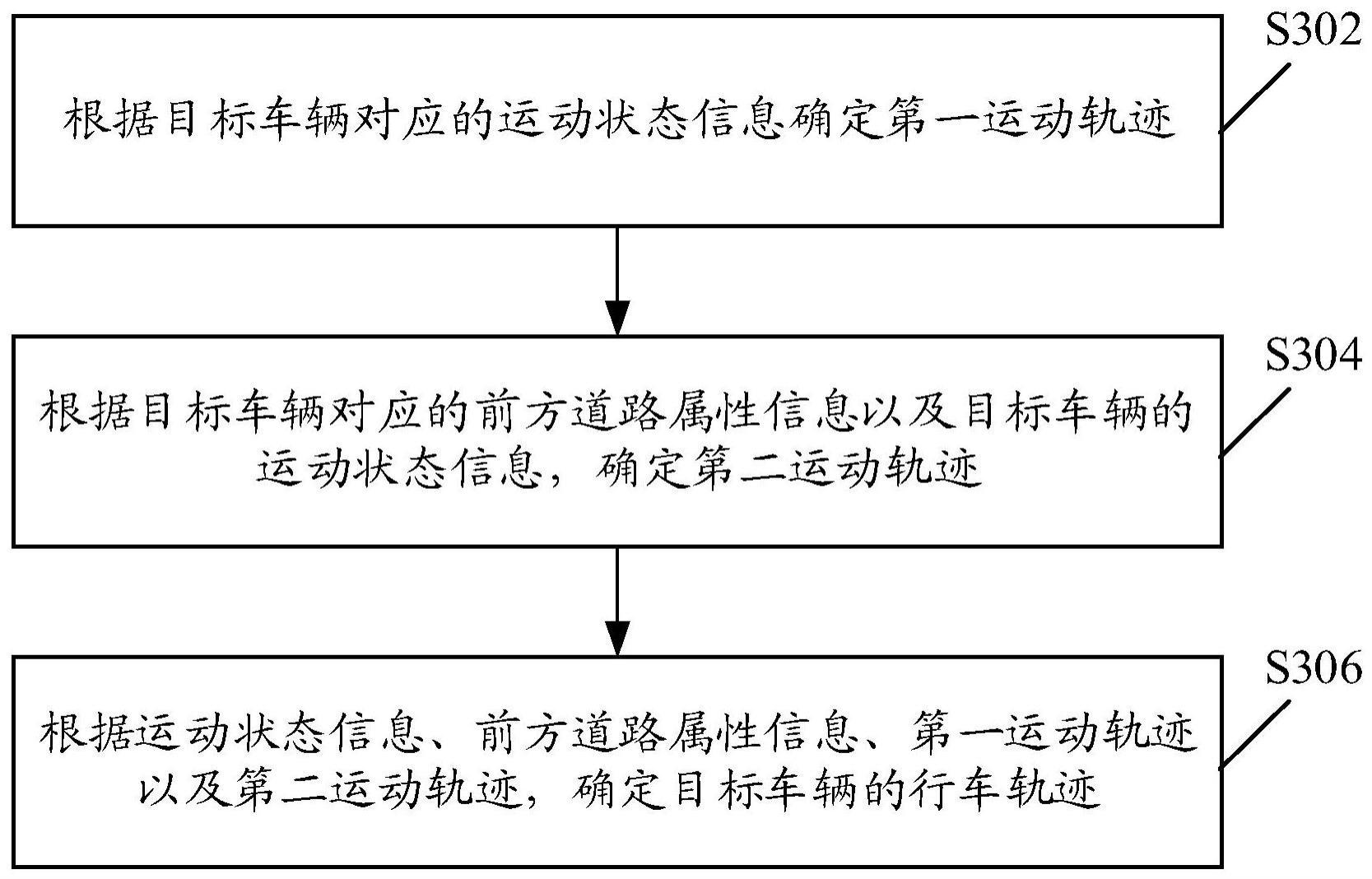
2、根据本发明实施例的一个方面,提供了一种行车轨迹确定方法,所述方法包括:根据目标车辆对应的运动状态信息确定第一运动轨迹;根据所述目标车辆对应的前方道路属性信息以及所述目标车辆的运动状态信息,确定第二运动轨迹;根据所述运动状态信息、所述前方道路属性信息、所述第一运动轨迹以及所述第二运动轨迹,确定所述目标车辆的行车轨迹。
3、进一步地,所述根据所述运动状态信息、所述前方道路属性信息、所述第一运动轨迹以及所述第二运动轨迹,确定所述目标车辆的行车轨迹,包括:根据所述运动状态信息以及所述前方道路属性信息,从所述第一运动轨迹和所述第二运动轨迹中确定所述目标车辆的行车轨迹。
4、进一步地,所述根据目标车辆对应的运动状态信息确定第一运动轨迹,包括:根据所述目标车辆的横摆角速度以及车速,确定所述目标车辆的第一曲率以及第一转弯半径;根据所述目标车辆的方向盘转角以及方向盘转角变化率,确定所述目标车辆的第二曲率以及第二转弯半径;根据所述第一曲率、所述第一转弯半径、所述第二曲率、所述第二转弯半径,确定所述目标车辆的运动曲率以及运动转弯半径;根据运动曲率以及所述运动转弯半径,确定所述第一运动轨迹。
5、进一步地,所述根据所述第一曲率、所述第一转弯半径、所述第二曲率、所述第二转弯半径,确定所述目标车辆的运动曲率以及运动转弯半径,包括:若所述车速大于第一预设速度阈值,则确定所述运动曲率为所述第一曲率,以及所述运动转弯半径为所述第一转弯半径;若所述车速小于第二预设速度阈值,则确定所述运动曲率为所述第二曲率,以及所述运动转弯半径为所述第二转弯半径;若所述车速大于或等于第二预设速度阈值,且小于或等于所述第一预设速度阈值,则根据所述车速与所述第一预设速度阈值的第一差值、所述车速与所述第二预设速度阈值的第二差值、所述第一曲率以及所述第二曲率确定所述运动曲率,以及,根据所述第一差值以及所述第二差值确定所述运动转弯半径。
6、进一步地,所述第一运动轨迹包括多段子轨迹,各个所述子轨迹分别包括三阶贝塞尔曲线的第一控制点、第二控制点、第三控制点以及第四控制点,所述第一控制点为起始点,所述第四控制点为结束点,其中,所述根据运动曲率以及所述运动转弯半径,确定所述第一运动轨迹,包括:根据所述运动曲率以及所述运动转弯半径,确定所述第一运动轨迹对应的首段子轨迹的第一控制点、第二控制点、第三控制点;根据所述首段子轨迹的第一控制点、第二控制点、第三控制点,确定所述首段子轨迹的第四控制点;根据所述首段子轨迹的第一控制点、第二控制点、第三控制点以及第四控制点,依次确定各个所述子轨迹。
7、进一步地,所述根据所述首段子轨迹的第一控制点、第二控制点、第三控制点,确定所述首段子轨迹的第四控制点,包括:若所述目标车辆停止,或所述运动曲率小于或等于预设曲率阈值,则根据第一控制点以及所述车速,确定所述第四控制点;若所述运动曲率大于预设曲率阈值,则根据所述首段子轨迹的初始点对应的开始曲率,确定所述首段子轨迹的结束点对应的结束曲率;根据所述第一控制点、所述开始曲率、所述结束曲率、所述车速以及所述目标车辆的加速度,确定所述第四控制点。
8、进一步地,所述根据所述目标车辆对应的前方道路属性信息以及所述目标车辆的运动状态信息,确定第二运动轨迹,包括:根据所述前方道路属性信息获取所述目标车辆所处道路的道路模型,所述道路模型包括多段子道路,其中,所述子道路包括三阶贝塞尔曲线的第一控制点、第二控制点、第三控制点以及第四控制点,所述第一控制点为起始点,所述第四控制点为结束点;根据所述道路模型、所述目标车辆的运动状态信息确定子道路的第一控制点、第二控制点、第三控制点;根据所述子道路的第一控制点、第二控制点、第三控制点确定所述子道路的第四控制点。
9、进一步地,所述根据所述子道路的第一控制点、第二控制点、第三控制点确定所述子道路的第四控制点,包括:根据所述道路模型以及当前子道路中的纵向位置,确定上一段子道路的道路长度;根据所述道路模型以及所述道路长度,确定所述目标车辆在当前子道路中的第一横向速度和第一加速度;根据所述目标车辆在当前子道路中的横向位置、第一横向速度和第一加速度,确定所述第四控制点。
10、进一步地,所述根据所述运动状态信息以及所述前方道路属性信息,从所述第一运动轨迹和所述第二运动轨迹中确定所述目标车辆的行车轨迹,包括:若所述目标车辆的车速大于第三预设车速阈值、所述目标车辆的加速度小于预设加速度阈值且所述目标车辆与预设物体的距离大于或等于预设距离阈值时,确定所述行车轨迹为所述第二运动轨迹;否则,确定所述行车轨迹为所述第一运动轨迹。
11、根据本发明实施例的另一方面,还提供了一种行车轨迹确定装置,所述装置包括:第一确定模块,用于根据目标车辆对应的运动状态信息确定第一运动轨迹;第二确定模块,用于根据所述目标车辆对应的前方道路属性信息以及所述目标车辆的运动状态信息,确定第二运动轨迹;第三确定模块,用于根据所述运动状态信息、所述前方道路属性信息、所述第一运动轨迹以及所述第二运动轨迹,确定所述目标车辆的行车轨迹。
12、根据本发明实施例的另一方面,还提供了一种电子设备,包括处理器,存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如上所述的行车轨迹确定方法的步骤。
13、根据本发明实施例的另一方面,还提供了一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现如上所述的行车轨迹确定方法的步骤。
14、在本发明实施例中,根据目标车辆对应的运动状态信息确定第一运动轨迹;根据目标车辆对应的前方道路属性信息以及目标车辆的运动状态信息,确定第二运动轨迹;根据运动状态信息、前方道路属性信息、第一运动轨迹以及第二运动轨迹,确定目标车辆的行车轨迹。本实施例中分别根据目标车辆的运动状态信息以及前方道路属性信息,确定出两种运动轨迹,然后根据运动状态信息、前方道路属性信息等确定符合实际工况的行车轨迹,达到了提高了弯道工况下行车轨迹的准确率的目的,进而解决了由于在弯道工况下预测得到行车轨迹不符合驾驶员驾驶意图,行车轨迹不准确的问题的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!