一种自适应巡航系统改善跟停舒适性的方法和系统与流程
本发明属于自动驾驶系统,具体涉及一种自适应巡航系统改善跟停舒适性的方法和系统。
背景技术:
1、近年来,互联网技术、高精度地图和人工智能的迅速发展和广泛应用促进了自动驾驶技术的发展。相关报道表明,自动驾驶技术可减少90%交通事故,降低70%出行成本,以及有望成为下一代计算平台。自动驾驶技术主要包括感知、决策和执行三大环节。首先通过摄像头、毫米波雷达或激光雷达等传感器设备,采集与处理环境信息和车内信息;然后依据获取的信息和驾驶员意图进行决策判断,制定相应的控制策略;最后由执行系统对车辆机械能控制,反馈到底层模块执行任务,包括线控驱动、线控制动和线控转向等。
2、带启停自适应巡航控制系统(acc stop&go)是当传感器识别到前方无车时按照驾驶员设定的车速进行定速巡航控制,传感器识别到前车时实现自动跟车及跟停跟起功能。在acc stop&go跟停前车过程中,对执行器电子稳定控制系统(esc)和发动机管理系统(ems)进行联合控制,实现功能自动跟停。
3、目前,绝大多数车型在跟停前车的过程中,通常会出现跟停过程中减速不平顺,具体表现为以下两点:跟车过程前半段减速度较大,后半段减速度较小,呈现往前慢慢滑行的现象,极易出现车辆往前窜动;跟车过程前半段减速度较小,后半段减速度较大,导致本车顿挫点头。以上两点均不符合人类驾驶员的操作习惯,造成车内驾驶员和乘员强烈的不舒适感。
4、现有方法通过获取周围车辆的运动信息以及周围环境信息,根据预设的概率计算模型、运动信息和周围环境信息计算本车车辆前方的目标车辆停车或将要停车的目标概率。比较目标概率值与预设阈值的大小,计算出目标车辆的停车位置。本车根据其状态信息、计算出的目标车辆的停车位置及其状态信息,进行车辆跟停控制。该方法在计算目标车辆的停车位置时强相关目标车辆的速度、加速度信息,若目标车辆的速度、加速度信息稍微波动一下(当前绝大多数传感器的目标车辆的加速度信息并不可靠及准确),易造成停车位置的急剧变化(因其速度带平方计算及加速度作为分母计算),尽管方案后续设定了过渡过程使本车车速适当提高,但是为避免急加速急减速不舒适性,只能轻微缓解此问题,且造成跟停控制不连续性。
技术实现思路
1、本发明要解决的技术问题是:提供一种自适应巡航系统改善跟停舒适性的方法和系统,用于计算期望安全距离控制本车跟停车速。
2、本发明为解决上述技术问题所采取的技术方案为:一种自适应巡航系统改善跟停舒适性的方法,包括以下步骤:
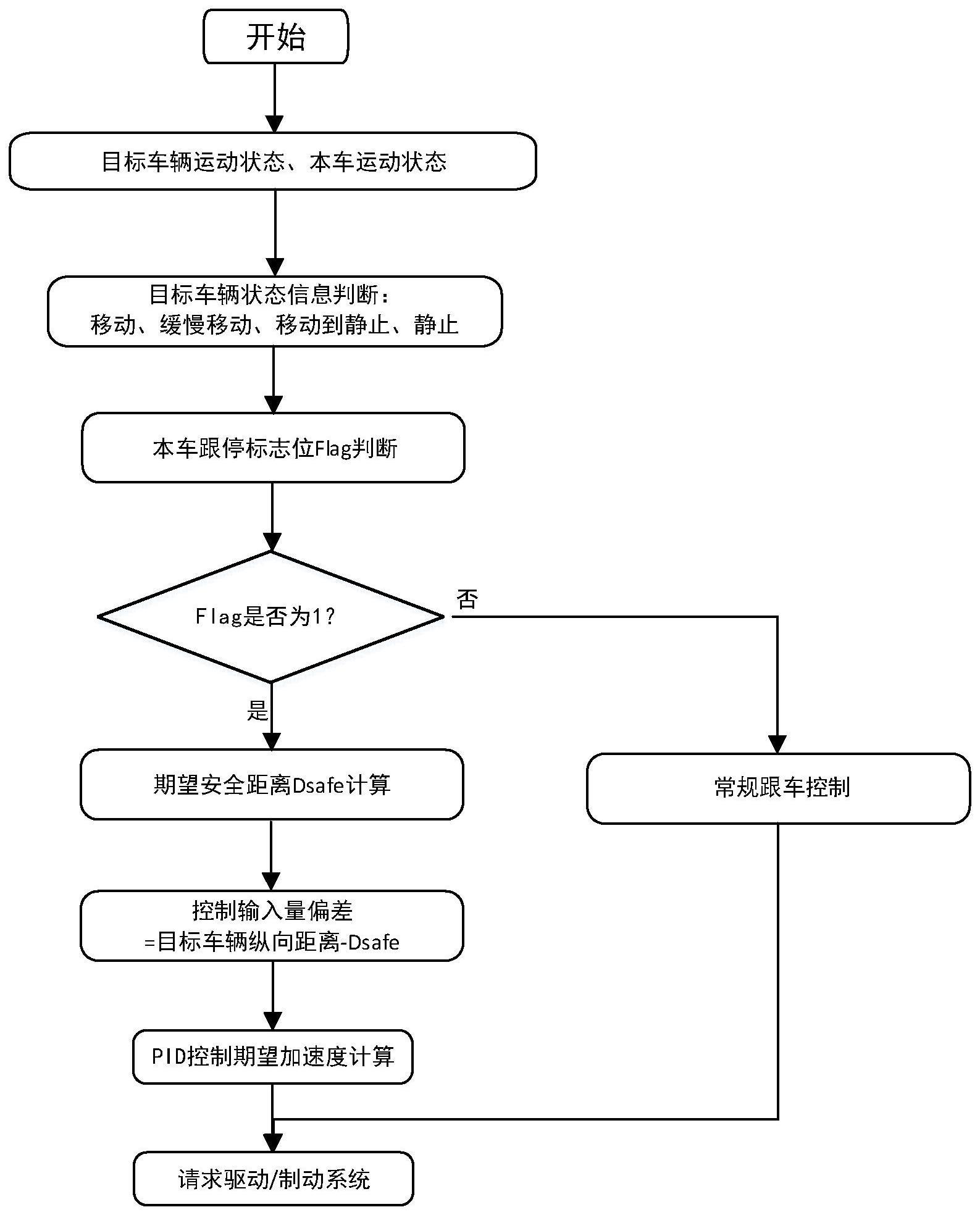
3、s0:传感设备检测目标车辆的运动状态信息和本车的运动状态信息;
4、s1:根据目标车辆的运动状态信息判断目标车辆所处的状态;
5、s2:根据目标车辆所处的状态得到本车跟停标志位flag;
6、s3:若本车跟停标志位flag为1时,根据目标车辆的运动状态信息和本车的运动状态信息,结合驾驶员设定的跟车时距信息,计算期望安全距离dsafe;设d0为可标定的最小跟停安全距离,与驾驶员设定的跟车时距相关;tg为可标定的驾驶员设定的跟车时距;g为可标定的驾驶员设定的跟车时距增益系数;△v为目标车辆车速与本车车速的差值;vh为本车车速;则期望安全距离dsafe为:
7、dsafe=d0+(tg–g*△v)*vh;
8、s4:将期望安全距离与目标车辆距离的差值作为pid控制器的输入量-偏差,经过pid控制器得到输出量-期望加速度值或输出量-期望减速度值,用于控制本车跟停过程中的车速;
9、s5:当目标车辆距离小于第一距离阈值时,在pid控制器得到的期望减速度值的基础上补偿第一减速度阈值,使目标车辆距离在第一距离阈值内时以大减速度制动以保证跟停安全避免碰撞;
10、s6:根据步骤s5输出的本车期望加速度值或减速度值,通过驱动/制动系统,使本车在跟停前车时以安全舒适的减速度进行跟停,当本车车速减至第二车速阈值时达到最小跟停安全距离d0,且此时目标车辆的状态信息为移动到静止或者静止时,acc stop&go系统请求esc保压,以保证本车静止以跟停前车。
11、按上述方案,所述的步骤s1中,目标车辆的运动状态包括移动、缓慢移动、移动到静止和静止;
12、若目标车辆的车速大于车速阈值1,则目标车辆所处的状态为移动;
13、若目标车辆车速大于0且小于车速阈值1,则目标车辆所处的状态为缓慢移动;
14、若目标车辆车速小于车速阈值1并且逐渐减小至0,则目标车辆所处的状态为移动到静止;
15、若传感设备一开始识别到目标车辆时目标车辆的车速为0,则目标车辆所处的状态为静止。
16、进一步的,所述的步骤s2中,当目标车辆的状态信息为缓慢移动、移动到静止或静止时,本车跟停标志位flag为1;
17、当目标车辆的状态信息为移动时,本车跟停标志位flag为0,以acc stop&go系统的常规跟车进行控制。
18、按上述方案,所述的步骤s1中,获取目标车辆的状态信息的方式包括通过v2v方式。
19、按上述方案,所述的步骤s3中,本车跟停目标车辆后的跟停距离d0与驾驶员设定的跟车时距相关,若跟车时距大则跟停距离远即d0大,若跟车时距小则跟停距离近即d0小;
20、本车稳定跟车巡航时,△v趋近于0,期望安全距离dsafe=d0+tg*vh,则本车与目标车辆的距离仅与跟车时距和本车车速相关,本车与目标车辆的车距时间与驾驶员设定的跟车时距相匹配;
21、本车非稳定跟车巡航时,△v不为0,期望安全距离dsafe除了与跟车时距和本车车速有关,还与目标车辆的车速有关系;当目标车辆的车速高于本车车速即△v大于0时,dsafe比同等情况下稳态跟车的dsafe小,符合驾驶员预期;当目标车辆的车速低于本车车速即△v小于0时,dsafe比同等情况下稳态跟车的dsafe大,保证安全的跟车距离,符合驾驶员预期。
22、按上述方案,所述的步骤s4中,pid控制器中的p、i、d三个系数通过查表标定,且与目标车辆的车速、目标车辆的距离、本车车速相关。
23、按上述方案,所述的步骤s5中,减速度补偿通过目标车辆距离查表标定得出。
24、一种用于自适应巡航系统改善跟停舒适性的方法的系统,包括依次连接的传感设备、期望安全距离计算模块和主动控制模块;传感设备用于采集目标车辆运动状态和本车运动状态;期望安全距离计算模块用于判断目标车辆状态信息、判断本车跟停标志位、计算期望安全距离和计算pid控制器期望加速度;主动控制模块用于驱动和控制系统。
25、一种计算机存储介质,其内存储有可被计算机处理器执行的计算机程序,该计算机程序执行一种自适应巡航系统改善跟停舒适性的方法。
26、本发明的有益效果为:
27、1.本发明的一种自适应巡航系统改善跟停舒适性的方法和系统,通过目标车辆与本车运动状态等信息计算出期望安全距离,将期望安全距离与目标车辆距离的差值作为比例积分微分(pid)控制的输入量-偏差,经过pid控制器得到其输出量-期望加/减速度值,此期望加/减速度用于进行本车跟停控制车速,实现了计算期望安全距离控制本车跟停车速的功能。
28、2.本发明根据传感设备检测到的目标车辆运动状态及本车运动状态、目标车辆与本车的相对纵向距离等信息,结合驾驶员设定的跟车时距信息,计算出期望安全距离。若期望安全距离小于目标车辆距离,则为期望加速度,请求ems扭矩;若期望安全距离大于目标车辆距离,则为期望减速度,请求esc制动。本发明的期望安全距离公式兼容了稳定跟车与非稳定跟车两种跟车场景,在保证稳定的跟车距离的同时亦保证了安全的跟车距离。
29、3.本发明通过pid控制期望安全距离与目标车辆距离的差值得到期望加/减速度,解决了acc stop&go跟停前车过程中存在减速不平顺的问题;并通过减速度补偿的方法解决在跟停过程后阶段,本车车速较高导致本车刹不住的问题。
- 还没有人留言评论。精彩留言会获得点赞!