一种泊车路径规划方法及装置与流程
本技术涉及汽车,具体而言,涉及一种泊车路径规划方法及装置。
背景技术:
1、目前,随着无人驾驶技术的发展,汽车智能化程度不断提高,其中,自主泊车技术可以减小驾驶员在面对狭小空间泊车时的难度,同时也提高了驾驶员舒适性和泊车安全性。现有的泊车路径规划方法,通常通过几何算法的方法规划车辆路径,使车辆通过三段路径,中间进行两次停车换挡的方式将车辆泊入车位中,且未采用基于车位的几何约束,导致泊车过程中严格不越过车位线,规划出来的路径,可实现的初始位置范围较小,无法有效利用车位两侧的空间,增加了泊车难度,从而降低驾驶体验度。
技术实现思路
1、本技术实施例的目的在于提供一种泊车路径规划方法及装置,能够对可行驶区域进行充分考虑,从而降低车位框对泊车的约束性,进而有利于实现短距离的快速泊入,实现降低泊车难度,提升驾驶体验度的效果。
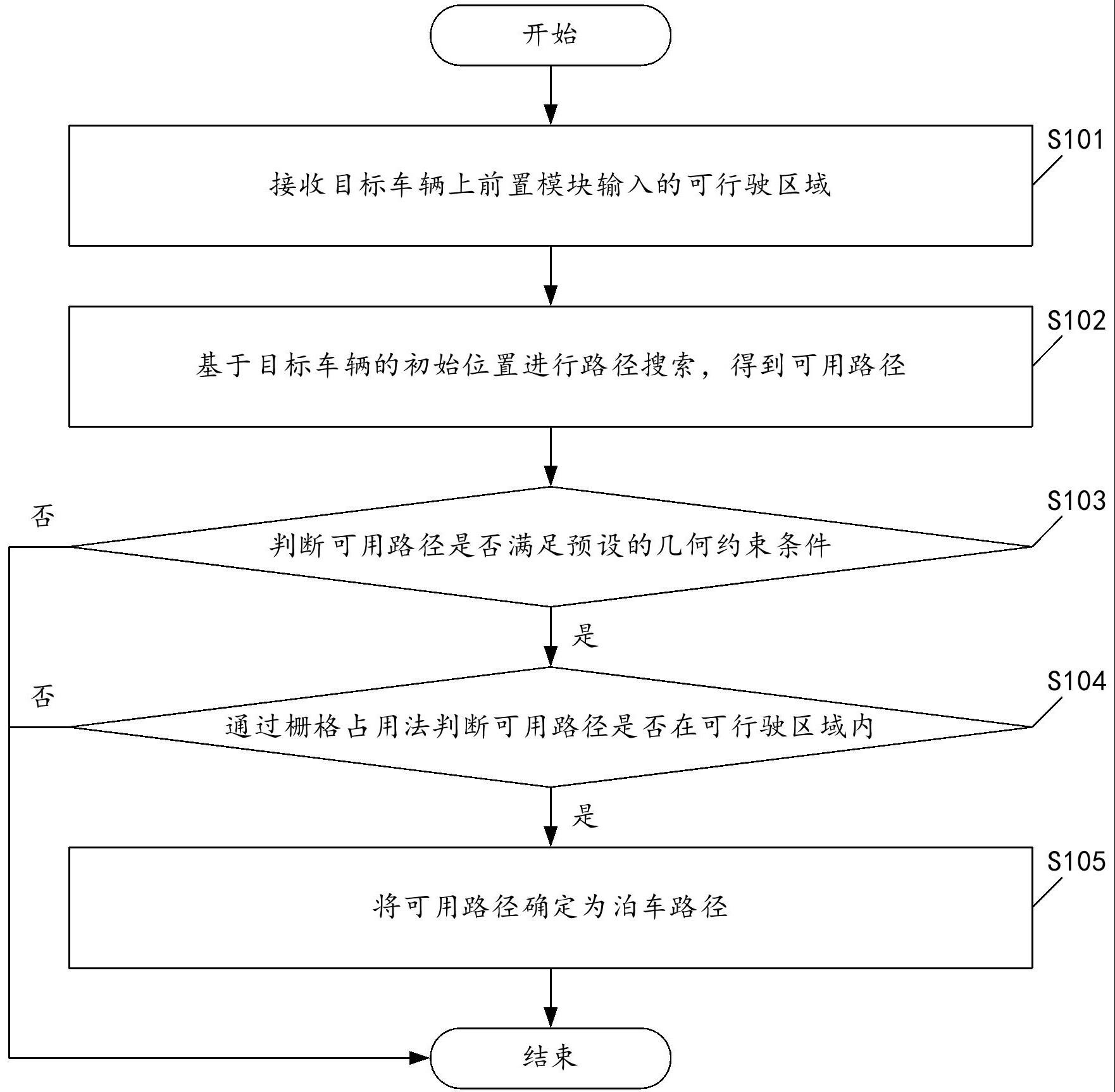
2、本技术实施例第一方面提供了一种泊车路径规划方法,所述方法包括:
3、接收目标车辆上前置模块输入的可行驶区域;
4、基于所述目标车辆的初始位置进行路径搜索,得到可用路径;
5、判断所述可用路径是否满足预设的几何约束条件;
6、当所述可用路径满足所述几何约束条件时,通过栅格占用法判断所述可用路径是否在所述可行驶区域内;
7、当所述可用路径在所述可行驶区域内时,将所述可用路径确定为泊车路径。
8、进一步地,所述基于所述目标车辆的初始位置进行路径搜索,得到可用路径的步骤包括:
9、基于所述目标车辆的初始位置进行路径搜索,得到圆形路径、回旋线、第一直线、圆弧和第二直线;
10、判断所述圆形路径、所述回旋线和所述第一直线的路径长度是否均为0;
11、当所述圆形路径、所述回旋线和所述第一直线的路径长度均为0时,确定所述目标车辆的初始位置为所述圆弧的路径起点;
12、基于所述路径起点、所述圆弧和所述第二直线确定可用路径。
13、进一步地,所述方法还包括:
14、当所述圆形路径、所述回旋线和所述第一直线的路径长度不均为0时,判断所述圆形路径和所述回旋线的路径长度是否均为0;
15、当所述圆形路径和所述回旋线的路径长度均为0时,确定所述第一直线的路径长度,并确定所述目标车辆的初始位置为所述第一直线的路径起点;
16、基于所述路径起点、所述第一直线、所述圆弧和所述第二直线确定可用路径。
17、进一步地,所述方法还包括:
18、当所述圆形路径和所述回旋线的路径长度不均为0时,判断所述圆形路径的路径长度是否为0;
19、当所述圆形路径的路径长度为0时,确定所述回旋线的衰减角和所述第一直线的路径长度,并确定所述目标车辆的初始位置为所述回旋线的路径起点;
20、基于所述路径起点、所述回旋线、所述第一直线、所述圆弧和所述第二直线确定可用路径。
21、进一步地,所述方法还包括:
22、当所述圆形路径的路径长度不为0时,确定所述圆形路径的圆心转角、所述回旋线的衰减角和所述第一直线的路径长度,并确定所述目标车辆的初始位置为所述圆形路径的路径起点;
23、基于所述路径起点、所述圆形路径、所述回旋线、所述第一直线、所述圆弧和所述第二直线确定可用路径。
24、进一步地,所述几何约束条件包括一步泊入路径的几何约束条件和两步泊入路径的几何约束条件;
25、其中,所述一步泊入路径包括回旋线、第一直线、圆弧和第二直线;所述两步泊入路径包括圆形路径和所述一步泊入路径。
26、进一步地,所述判断所述可用路径是否满足预设的几何约束条件的步骤包括:
27、当所述圆形路径的路径长度为0时,判断所述可用路径包括的所述回旋线、所述第一直线、所述圆弧和所述第二直线是否满足所述一步泊入路径的几何约束条件;或当所述圆形路径的路径长度不为0时,判断所述可用路径包括的所述圆形路径、所述回旋线、所述第一直线、所述圆弧和所述第二直线是否满足所述两步泊入路径的几何约束条件;
28、当所述可用路径包括的所述回旋线、所述第一直线、所述圆弧和所述第二直线满足所述一步泊入路径的几何约束条件,或所述可用路径包括的所述圆形路径、所述回旋线、所述第一直线、所述圆弧和所述第二直线满足所述两步泊入路径的几何约束条件时,去确定所述可用路径满足所述几何约束条件。
29、本技术实施例第二方面提供了一种泊车路径规划装置,所述泊车路径规划装置包括:
30、接收单元,用于接收目标车辆上前置模块输入的可行驶区域;
31、搜索单元,用于基于所述目标车辆的初始位置进行路径搜索,得到可用路径;
32、第一判断单元,用于判断所述可用路径是否满足预设的几何约束条件;
33、第二判断单元,用于当所述可用路径满足所述几何约束条件时,通过栅格占用法判断所述可用路径是否在所述可行驶区域内;
34、确定单元,用于当所述可用路径在所述可行驶区域内时,将所述可用路径确定为泊车路径。
35、进一步地,所述搜索单元包括:
36、搜索子单元,用于基于所述目标车辆的初始位置进行路径搜索,得到圆形路径、回旋线、第一直线、圆弧和第二直线;
37、第一判断子单元,用于判断所述圆形路径、所述回旋线和所述第一直线的路径长度是否均为0;
38、第一确定子单元,用于当所述圆形路径、所述回旋线和所述第一直线的路径长度均为0时,确定所述目标车辆的初始位置为所述圆弧的路径起点;
39、所述第一确定子单元,还用于基于所述路径起点、所述圆弧和所述第二直线确定可用路径。
40、进一步地,所述第一判断子单元,还用于当所述圆形路径、所述回旋线和所述第一直线的路径长度不均为0时,判断所述圆形路径和所述回旋线的路径长度是否均为0;
41、所述第一确定子单元,还用于当所述圆形路径和所述回旋线的路径长度均为0时,确定所述第一直线的路径长度,并确定所述目标车辆的初始位置为所述第一直线的路径起点;
42、所述第一确定子单元,还用于基于所述路径起点、所述第一直线、所述圆弧和所述第二直线确定可用路径。
43、进一步地,所述第一判断子单元,还用于当所述圆形路径和所述回旋线的路径长度不均为0时,判断所述圆形路径的路径长度是否为0;
44、所述第一确定子单元,还用于当所述圆形路径的路径长度为0时,确定所述回旋线的衰减角和所述第一直线的路径长度,并确定所述目标车辆的初始位置为所述回旋线的路径起点;
45、所述第一确定子单元,还用于基于所述路径起点、所述回旋线、所述第一直线、所述圆弧和所述第二直线确定可用路径。
46、进一步地,所述第一确定子单元,还用于当所述圆形路径的路径长度不为0时,确定所述圆形路径的圆心转角、所述回旋线的衰减角和所述第一直线的路径长度,并确定所述目标车辆的初始位置为所述圆形路径的路径起点;
47、所述第一确定子单元,还用于基于所述路径起点、所述圆形路径、所述回旋线、所述第一直线、所述圆弧和所述第二直线确定可用路径。
48、进一步地,所述几何约束条件包括一步泊入路径的几何约束条件和两步泊入路径的几何约束条件;
49、其中,所述一步泊入路径包括回旋线、第一直线、圆弧和第二直线;所述两步泊入路径包括圆形路径和所述一步泊入路径。
50、进一步地,所述第一判断单元包括:
51、第二判断子单元,用于当所述圆形路径的路径长度为0时,判断所述可用路径包括的所述回旋线、所述第一直线、所述圆弧和所述第二直线是否满足所述一步泊入路径的几何约束条件;或当所述圆形路径的路径长度不为0时,判断所述可用路径包括的所述圆形路径、所述回旋线、所述第一直线、所述圆弧和所述第二直线是否满足所述两步泊入路径的几何约束条件;
52、第二确定子单元,用于当所述可用路径包括的所述回旋线、所述第一直线、所述圆弧和所述第二直线满足所述一步泊入路径的几何约束条件,或所述可用路径包括的所述圆形路径、所述回旋线、所述第一直线、所述圆弧和所述第二直线满足所述两步泊入路径的几何约束条件时,确定所述可用路径满足所述几何约束条件。
53、本技术实施例第三方面提供了一种电子设备,包括存储器以及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行本技术实施例第一方面中任一项所述的泊车路径规划方法。
54、本技术实施例第四方面提供了一种计算机可读存储介质,其存储有计算机程序指令,所述计算机程序指令被一处理器读取并运行时,执行本技术实施例第一方面中任一项所述的泊车路径规划方法。
- 还没有人留言评论。精彩留言会获得点赞!