一种垂直车位泊车方法与流程
本发明涉及自动泊车,尤其涉及一种垂直车位泊车方法。
背景技术:
1、随着汽车行业的迅速发展,自动泊车已经成为目前汽车中普遍具备的功能,该功能能有效地协助或代替驾驶员在不同环境完成泊车操作,提高泊车过程中的行驶安全性。然而,目前自动泊车技术仍然面临如何在有限的空间内进行高效地轨迹规划的同时确保乘坐舒适这一主要问题。
2、与平行车位相比,在规划垂直车位的车尾泊入轨迹时,由于在车辆前进的过程中车辆自身车长的关系,所需的停车面积更大。现有泊车策略通常采用多步泊入,需要通过反复揉库(驻车换挡为一次揉库)来调整车辆位姿,在泊车过程中有可能因为跟踪控制精度的问题导致泊车失败,不仅效率低下,而且反复揉库带来的频繁加减速也会极大地降低乘坐的舒适性。
技术实现思路
1、本发明提供一种垂直车位泊车方法,旨在解决现有技术中的缺陷,最大化地利用泊车对向空间以及车位空间,有效拓宽泊车初始可行区域,且有效地减少了车辆揉库的次数,乘坐舒适性更好。
2、为达到上述目的,本发明所采取的技术方案为:
3、本发明提供一种垂直车位泊车方法,包括:
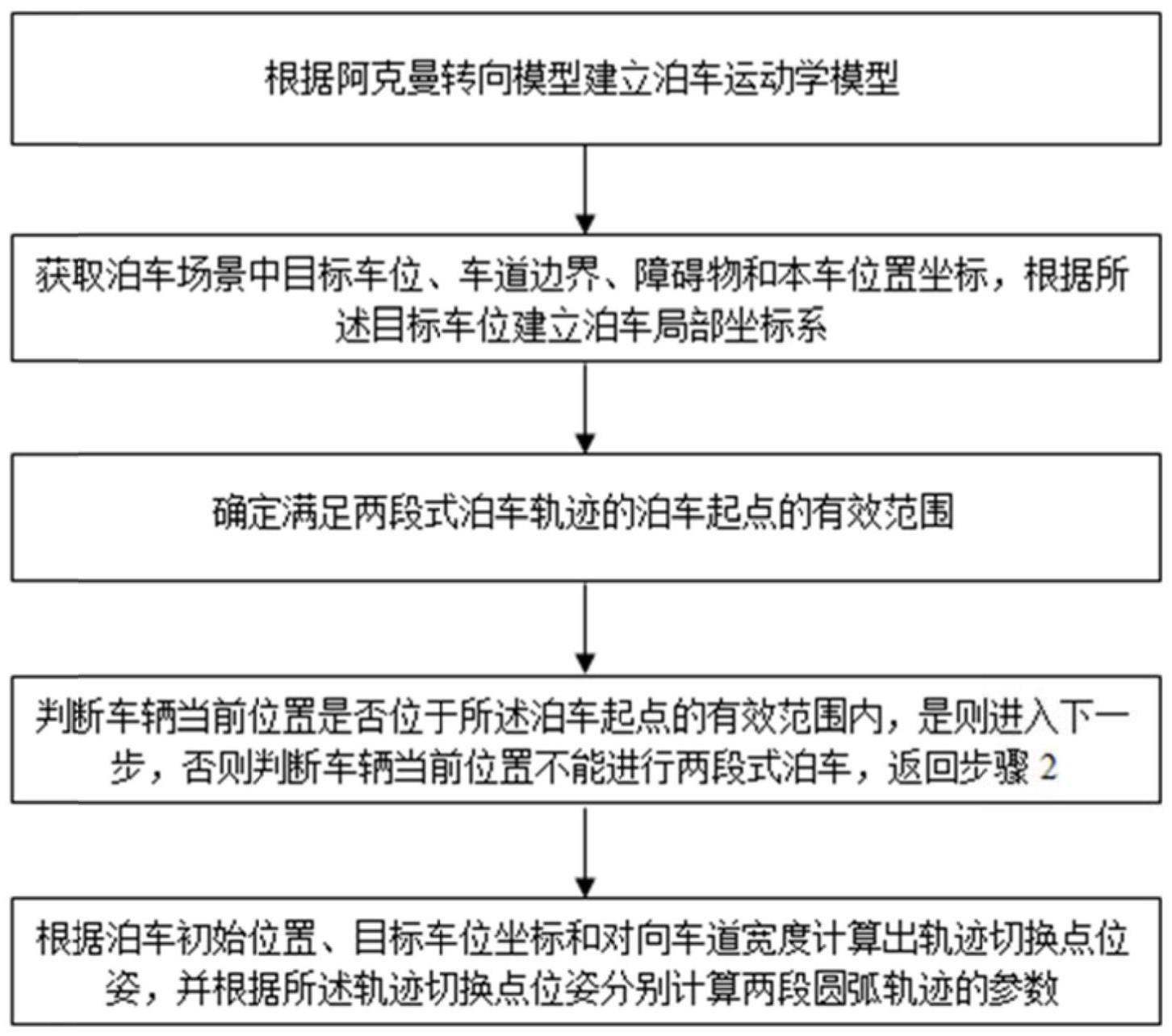
4、步骤1、根据阿克曼转向模型建立泊车运动学模型;
5、步骤2、获取泊车场景中目标车位、车道边界、障碍物和本车位置坐标,根据所述目标车位建立泊车局部坐标系;
6、步骤3、确定满足两段式泊车轨迹的泊车起点的有效范围;
7、步骤4、判断车辆当前位置是否位于所述泊车起点的有效范围内,是则进入下一步,否则判断车辆当前位置不能进行两段式泊车,返回步骤2;
8、步骤5、根据泊车初始位置、目标车位坐标和对向车道宽度计算出轨迹切换点位姿,并根据所述轨迹切换点位姿分别计算两段圆弧轨迹的参数。
9、具体地,所述步骤3包括:
10、步骤301、确定满足两段式泊车轨迹的泊车起点的纵坐标的下限值、上限值;
11、步骤302、根据所述泊车轨迹的泊车起点的纵坐标的下限值、上限值在所述泊车局部坐标系中分别绘制泊车起点上限截止线、泊车起点下限截止线,所述泊车起点上限截止线、下限截止线确定的范围为泊车起点的有效范围。
12、具体地,确定所述泊车起点的纵坐标下限值的方法包括:在所述两段式泊车轨迹的第一段圆弧轨迹中,设定本车位于第一状态时满足第一关系式,所述第一状态为本车右后点与所述第一段圆弧轨迹的圆心的连线与车位入口线垂直时。
13、具体地,所述第一关系式为:yo1-|o1v3'|>yp2,其中,yo1表示第一段圆弧轨迹的圆心o1的纵坐标,yp2表示目标车位左上角点p2的纵坐标,|o1v3'|表示本车位于第一状态时本车右后点v3与所述第一段圆弧轨迹的圆心o1的连线之长度。
14、具体地,所述泊车起点的纵坐标下限值根据如下公式确定:
15、
16、其中,ya1表示泊车起点的纵坐标下限值,yp2表示目标车位左上角点p2的纵坐标,s1表示车辆与车道下边界的安全距离,rmin表示本车最小转弯半径,wv表示本车车宽,lr表示本车后悬长。
17、具体地,确定所述泊车起点的纵坐标上限值的方法包括:在所述两段式泊车轨迹的第二段圆弧轨迹中,设定当本车位于第二状态时满足第二关系式,所述第二状态为车辆左前点与所述第二段圆弧轨迹的圆心的连线与对向边界垂直。
18、具体地,所述第二关系式为:yo2+|o2v1'|<yp1+wr,θ1>θ3,
19、其中,yo2表示第二段圆弧轨迹的圆心o2的纵坐标,yp1表示目标车位右上角p1的纵坐标,wr表示对向车道宽度,|o2v1'|表示本车位于第二状态时本车车辆左前点v1与所述第二段圆弧轨迹的圆心o2的连线之长度,θ1表示第一段轨迹圆心角,θ3表示判决角度,所述判决角度θ3根据如下式子确定:
20、
21、l表示本车的轮距,lf表示本车的前悬长,wv表示本车车宽,rmin表示本车最小转弯半径。
22、具体地,所述泊车起点的纵坐标上限值根据如下公式确定:
23、
24、其中,ya2表示泊车起点的纵坐标上限值,yp1表示目标车位右上角p1的纵坐标,wr表示对向车道宽度,rmin表示本车最小转弯半径,s2表示车辆与车道上边界的安全距离,l表示本车的轮距,lf表示本车的前悬长,wv表示本车车宽。
25、具体地,所述步骤5包括:
26、步骤501、控制本车行驶到泊车起点,并控制本车的初始车身航向角为0;
27、步骤502、根据所述泊车起点到目标车位对向边界的距离自适应确定第一段圆弧轨迹的长度,控制本车行驶到轨迹切换点后停止;
28、步骤503、控制本车切换为倒挡,并将方向盘反方向转至极限位置,控制本车沿第二段圆弧轨迹倒入目标车位的泊车终点。
29、具体地,所述泊车起点、轨迹切换点、泊车终点的坐标及在上述位置的本车航向角根据如下公式确定:
30、xa=xc+rmin(1-cosθ2-sinθ1)
31、xb=xc+rmin(1-cosθ2)
32、yb=ya+rmin(1-cosθ1)
33、yc=ya+rmin(1-cosθ1-sinθ2)
34、
35、θ2=π/2-θ1
36、θa=0,θb=θ1,θc=π/2
37、其中:
38、m=yp1+wr-s2-rmin-ya
39、
40、ya表示泊车起点的纵坐标,xc表示泊车终点的横坐标,为已知值。
41、本发明的有益效果在于:本发明基于两段式圆弧规划垂直车位车尾泊入轨迹,在满足边界约束与避撞约束的条件下,根据车辆初始位置与边界障碍物的相对位置关系,自适应地计算两段圆弧轨迹相切处的位姿、两段圆弧轨迹的参数,最大化地利用泊车对向空间以及车位空间,不仅能有效拓宽泊车初始可行区域,而且两段式圆弧轨迹还有效地减少了车辆揉库的次数,乘坐舒适性更好。
技术特征:
1.一种垂直车位泊车方法,其特征在于,包括:
2.根据权利要求1所述的垂直车位泊车方法,其特征在于,所述步骤3包括:
3.根据权利要求2所述的垂直车位泊车方法,其特征在于,确定所述泊车起点的纵坐标下限值的方法包括:在所述两段式泊车轨迹的第一段圆弧轨迹中,设定本车位于第一状态时满足第一关系式,所述第一状态为本车右后点与所述第一段圆弧轨迹的圆心的连线与车位入口线垂直时。
4.根据权利要求3所述的垂直车位泊车方法,其特征在于,所述第一关系式为:yo1-|o1v3'|>yp2,其中,yo1表示第一段圆弧轨迹的圆心o1的纵坐标,yp2表示目标车位左上角点p2的纵坐标,|o1v3'|表示本车位于第一状态时本车右后点v3与所述第一段圆弧轨迹的圆心o1的连线之长度。
5.根据权利要求4所述的垂直车位泊车方法,其特征在于,所述泊车起点的纵坐标下限值根据如下公式确定:
6.根据权利要求2所述的垂直车位泊车方法,其特征在于,确定所述泊车起点的纵坐标上限值的方法包括:在所述两段式泊车轨迹的第二段圆弧轨迹中,设定当本车位于第二状态时满足第二关系式,所述第二状态为车辆左前点与所述第二段圆弧轨迹的圆心的连线与对向边界垂直。
7.根据权利要求6所述的垂直车位泊车方法,其特征在于,所述第二关系式为:yo2+|o2v1'|<yp1+wr,θ1>θ3,
8.根据权利要求7所述的垂直车位泊车方法,其特征在于,所述泊车起点的纵坐标上限值根据如下公式确定:
9.根据权利要求1所述的垂直车位泊车方法,其特征在于,所述步骤5包括:
10.根据权利要求9所述的垂直车位泊车方法,其特征在于,所述泊车起点、轨迹切换点、泊车终点的坐标及在上述位置的本车航向角根据如下公式确定:
技术总结
本发明提供垂直车位泊车方法,基于两段式圆弧规划垂直车位车尾泊入轨迹,在满足边界约束与避撞约束的条件下,根据车辆初始位置与边界障碍物的相对位置关系,自适应地计算两段圆弧轨迹相切处的位姿、两段圆弧轨迹的参数,最大化地利用泊车对向空间以及车位空间,不仅能有效拓宽泊车初始可行区域,而且两段式圆弧轨迹还有效地减少了车辆揉库的次数,乘坐舒适性更好。
技术研发人员:刘振
受保护的技术使用者:惠州华阳通用电子有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!