车辆的控制装置及控制方法与流程
本发明涉及车辆的控制装置及控制方法。
背景技术:
1、日本特开2004-50904号公报中记载的控制装置能够执行所谓的自动巡航处理。控制装置在车辆以恒定的速度行驶的稳定行驶状态的情况下,执行自动巡航处理。具体而言,控制装置判定车速是否在以预先确定的规定值为中央值的一定的范围内或加速踏板的操作量是否在以预先确定的规定值为中央值的一定的范围内。然后,当上述的判定结果为肯定的状态持续了预先确定的规定时间的情况下,控制装置执行自动巡航处理。在执行自动巡航处理的过程中,控制装置自动控制加速器操作量,使得作为目标的车速与当前的车速之差变小。即,控制装置在自动巡航处理过程中,以使车速为大致恒定的方式进行控制。
技术实现思路
1、发明所要解决的课题
2、在上述公报所记载的控制装置中,对能否执行自动巡航处理没有考虑车辆行驶的路面的坡度的影响。因此,即使驾驶者意图将车速保持为恒定而操作加速踏板,有时自动巡航处理也不会被执行。
3、用于解决课题的技术方案
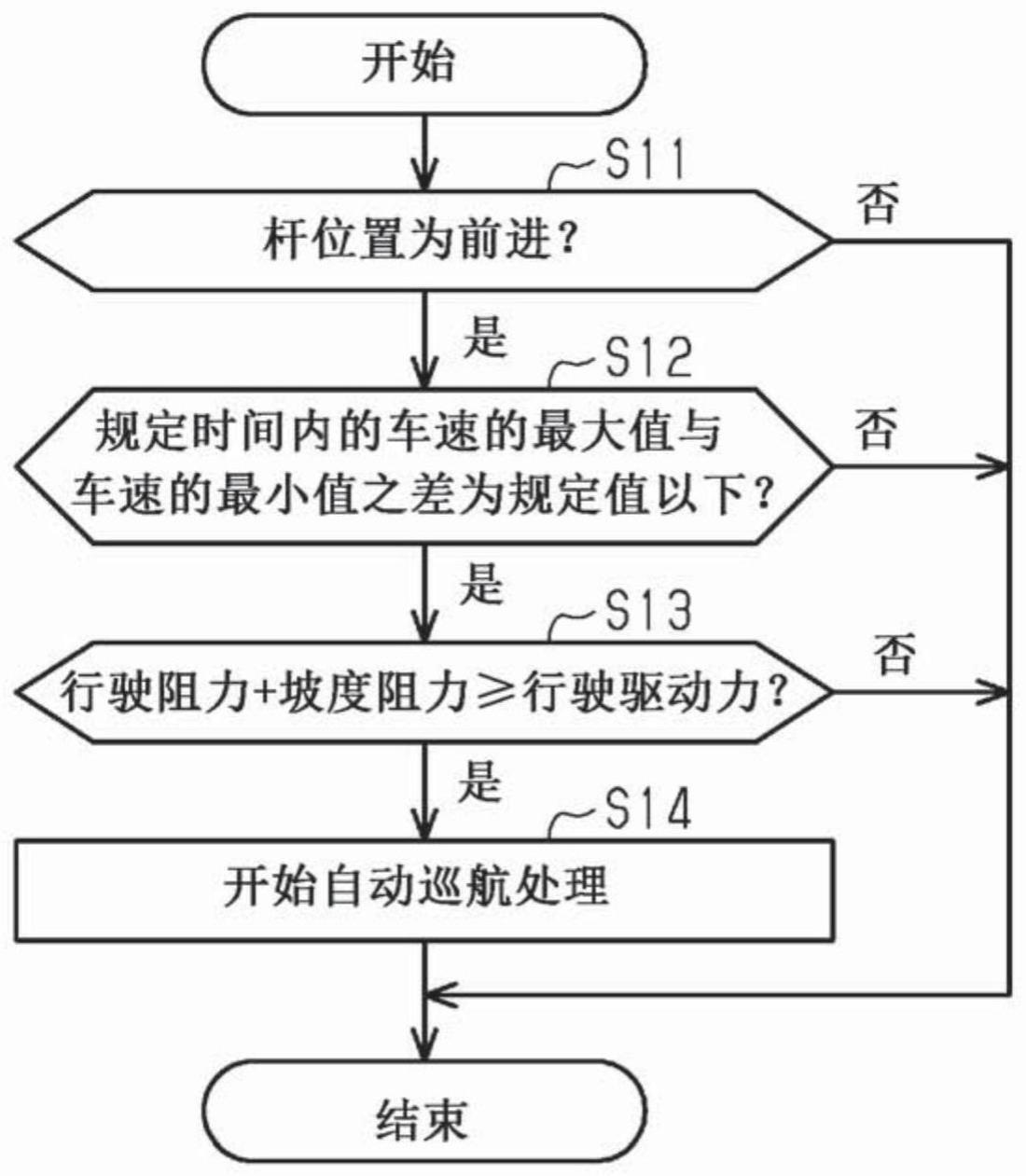
4、本发明的一个方式所涉及的车辆的控制装置适用于车辆,该车辆具备:加速器传感器,构成为检测加速踏板的操作量;车速传感器,构成为检测车速;及坡度传感器,构成为检测车辆行驶的路面的坡度。所述控制装置构成为执行如下处理:计算处理,基于所述车速及所述加速踏板的操作量,计算使所述车辆前进所需的行驶驱动力;及自动巡航处理,以使所述车速成为恒定的目标车速的方式进行控制。所述控制装置构成为,以预先确定的规定时间内的所述车速的最大值与最小值之差为预先确定的规定值以下、且基于所述车速计算的行驶阻力与基于所述路面的坡度计算的坡度阻力之和为所述行驶驱动力以上作为条件,执行所述自动巡航处理。
技术特征:
1.一种车辆的控制装置,其中,
2.根据权利要求1所述的车辆的控制装置,其中,
3.根据权利要求1所述的车辆的控制装置,其中,
4.根据权利要求1所述的车辆的控制装置,其中,
5.根据权利要求1所述的车辆的控制装置,其中,
6.一种车辆的控制方法,其中,
技术总结
本发明涉及车辆的控制装置及控制方法。车辆具备加速器传感器、车速传感器及坡度传感器。车辆的控制装置构成为执行:计算处理,基于车速及加速踏板的操作量,计算使车辆前进所需的行驶驱动力;及自动巡航处理,以使车速成为恒定的目标车速的方式进行控制。控制装置构成为,以预先确定的规定时间内的车速的最大值与最小值之差为预先确定的规定值以下、且基于车速计算的行驶阻力与基于路面的坡度计算的坡度阻力之和为行驶驱动力以上作为条件,执行自动巡航处理。
技术研发人员:佐佐木克也
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!