一种基于视觉监测的大型筒段产品的对接方法与流程
本发明涉及大筒段对接,更为具体来说,本发明为一种基于视觉监测的大型筒段产品的对接方法。
背景技术:
1、大型筒段类产品(筒径不小于2m,筒长不小于16m)通过专用运输车实现远距离机动运输后,需通过筒段尾端法兰面执行对接作业,进而完成后续操作任务。现有操作手段主要通过观察员与驾驶员配合实现运输车初始到位,然后通过手摇调整机构逐步调整,实现筒段尾端法兰与对接面的对正对接。
2、现有对接操作方案存在的问题包括:①观察员需同时在运输车车头方向以及筒段尾端法兰两侧进行观察,由于运输车及筒段产品尺寸规模较大,同时人眼观察误差较大,导致操作员手动驱动调整机构执行作业过程中往往发现无法调整到位,需重新调整车身姿态后继续操作调整机构,底盘与上装调整机构反复交叉调整,导致整个过程操作繁琐、作业周期长;②每个运输车驾驶员及观察员的作业水平参差不齐,单纯依赖人工观察及操作也会影响操作精度及工作效率。
技术实现思路
1、本发明要解决的技术问题在于提供一种基于视觉监测的大型筒段产品的对接方法,从分段式对接的角度出发,采用远焦、近焦两组相机,通过视场衔接实现不同距离范围内的精确测量;通过相机实时监测对接面偏差信息确保对接一次到位,避免反复调整;在较远及较近两个距离范围内分别通过底盘及做自由度调节机构实现,在确保对接精度的前提下提升了对接速度,从而克服上述现有技术的不足。
2、为实现上述的技术目的,本发明实施例公开了一种基于视觉监测的大型筒段产品的对接方法,包括:
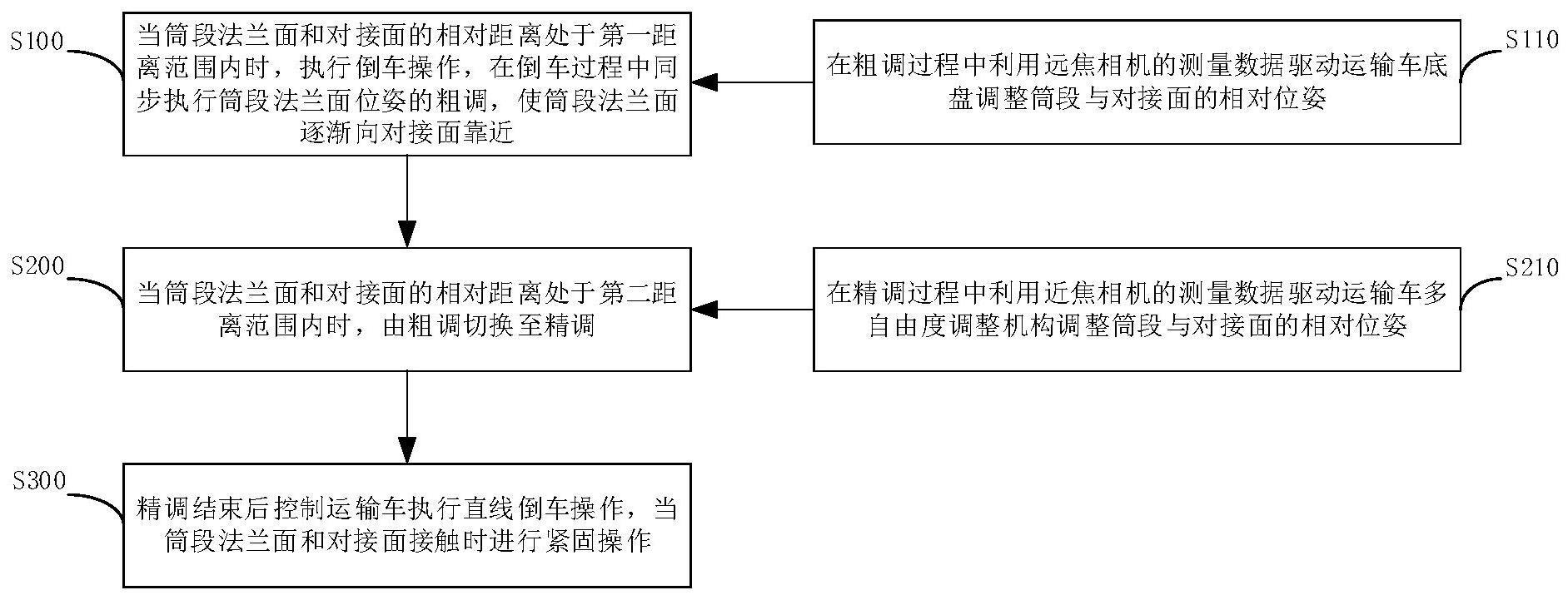
3、当筒段法兰面和对接面的相对距离处于第一距离范围内时,执行倒车操作,在倒车过程中同步执行筒段法兰面位姿的粗调,使筒段法兰面逐渐向对接面靠近;
4、在粗调过程中利用远焦相机的测量数据驱动运输车底盘调整筒段与对接面的相对位姿;
5、当筒段法兰面和对接面的相对距离处于第二距离范围内时,由粗调切换至精调;
6、在精调过程中利用近焦相机的测量数据驱动运输车多自由度调整机构调整筒段与对接面的相对位姿;
7、精调结束后控制运输车执行直线倒车操作,当筒段法兰面和对接面接触时进行紧固操作。
8、进一步的,本发明一种基于视觉监测的大型筒段产品的对接方法,其中所述粗调的步骤包括:
9、控制运输车在筒段法兰面和对接面的相对距离为第一距离的初始位置开始倒车;
10、利用远焦相机测量筒段法兰面和对接面的相对位姿;
11、提取筒段法兰面和对接面的相对位姿信息;
12、通过控制系统解算运输车底盘各向调整量,所述各向调整量包括纵向偏角调整量、横向偏移调整量和纵向偏移调整量;
13、根据各向调整量实时控制运输车底盘调整车身位姿;
14、当筒段法兰面和对接面相对距离为第二距离时进行第一次停车并回正运输车车轮。
15、进一步的,本发明一种基于视觉监测的大型筒段产品的对接方法,其中所述精调的步骤包括:
16、在第一次停车状态下将远焦相机切换至近焦相机;
17、利用近焦相机测量筒段法兰面和对接面的相对位姿;
18、通过控制系统解算并控制多自由度调整机构执行筒段位姿的第一次精调;
19、第一次精调结束后控制运输车倒车使筒段法兰面和对接面靠近;
20、当筒段法兰面和对接面相对距离为第三距离时进行第二次停车;
21、利用近焦相机测量筒段法兰面和对接面的相对位姿;
22、通过控制系统解算并控制多自由度调整机构执行筒段位姿的第二次精调;
23、第二次精调后控制多自由度调整机构停止运动。
24、进一步的,本发明一种基于视觉监测的大型筒段产品的对接方法,其中所述粗调切换至精调时还需执行如下步骤:
25、解算并预判多自由度调整机构对接执行的可行性;
26、判断多自由度调整机构是否满足精调初始精度要求;
27、若否,则执行粗调的步骤;
28、若是,则控制运输车底盘停止运动执行精调的步骤。
29、进一步的,本发明一种基于视觉监测的大型筒段产品的对接方法,其中所述在第一次精调结束后第二次停车前的运输车倒车过程中,利用近焦相机实时测量筒段法兰面与对接面的相对位姿,使多自由度调整机构的调整余量始终满足第二次精调的调整需求。
30、进一步的,本发明一种基于视觉监测的大型筒段产品的对接方法,其中在所述第一次精调和第二次精调中多自由度调整机构调整筒段位姿的顺序为:
31、调整筒段的俯仰和横摆;
32、调整筒段的高低和左右横移;
33、调整筒段的轴向滚转。
34、进一步的,本发明一种基于视觉监测的大型筒段产品的对接方法,其中所述运输车底盘调节筒段位姿的方法为:
35、利用运输车底盘的八字转向模式调节筒段的纵向偏角;
36、利用运输车底盘的斜行模式调节筒段的横向偏移;
37、利用运输车底盘的直行模式调节筒段的纵向偏移。
38、进一步的,本发明一种基于视觉监测的大型筒段产品的对接方法,其中所述远焦相机安装于运输车车尾,所述近焦相机安装于通筒段的筒尾。
39、进一步的,本发明一种基于视觉监测的大型筒段产品的对接方法,其中所述第一距离范围为3-20m,所述第二距离范围0-3m。
40、进一步的,本发明一种基于视觉监测的大型筒段产品的对接方法,其中所述第一距离为20m,第二距离为3m,第三距离为0.5m。
41、本发明的有益效果为:通过不同相机有效测量范围的衔接以保证全距离范围内的精确测量。由远焦相机测量数据驱动运输车底盘快速粗调,结合近焦相机驱动多自由度调整机构精确调整的接力式执行过程,将最后的精确对正对接控制交给高作业精度的多自由度调整机构独立执行,也克服了运输车底盘位置变化带来的作业精度控制问题。通过采用上述较远及较近两个距离范围内分别通过运输车底盘及多自由度调整机构实现,在确保对接精度的前提下提升了对接速度。
技术特征:
1.一种基于视觉监测的大型筒段产品的对接方法,其特征在于,包括:
2.根据权利要求1所述的一种基于视觉监测的大型筒段产品的对接方法,其特征在于,所述粗调的步骤包括:
3.根据权利要求2所述的一种基于视觉监测的大型筒段产品的对接方法,其特征在于,所述精调的步骤包括:
4.根据权利要求1所述的一种基于视觉监测的大型筒段产品的对接方法,其特征在于,所述粗调切换至精调时还需执行如下步骤:
5.根据权利要求3所述的一种基于视觉监测的大型筒段产品的对接方法,其特征在于,所述在第一次精调结束后第二次停车前的运输车倒车过程中,利用近焦相机实时测量筒段法兰面与对接面的相对位姿,使多自由度调整机构的调整余量始终满足第二次精调的调整需求。
6.根据权利要求3所述的一种基于视觉监测的大型筒段产品的对接方法,其特征在于,在所述第一次精调和第二次精调中多自由度调整机构调整筒段位姿的顺序为:
7.根据权利要求2所述的一种基于视觉监测的大型筒段产品的对接方法,其特征在于,所述运输车底盘调节筒段位姿的方法为:
8.根据权利要求1所述的一种基于视觉监测的大型筒段产品的对接方法,其特征在于,所述远焦相机安装于运输车车尾,所述近焦相机安装于通筒段的筒尾。
9.根据权利要求1所述的一种基于视觉监测的大型筒段产品的对接方法,其特征在于,所述第一距离范围为3-20m,所述第二距离范围0-3m。
10.根据权利要求3所述的一种基于视觉监测的大型筒段产品的对接方法,其特征在于,所述第一距离为20m,第二距离为3m,第三距离为0.5m。
技术总结
本发明公开了一种基于视觉监测的大型筒段产品的对接方法,包括:当筒段法兰面和对接面的相对距离处于第一距离范围内时,采用粗调的方式;在粗调过程中利用远焦相机的测量数据驱动运输车底盘调整筒段与对接面的相对位姿;当筒段法兰面和对接面的相对距离处于第二距离范围内时,由粗调切换至精调;在精调过程中利用近焦相机的测量数据驱动运输车多自由度调整机构调整筒段与对接面的相对位姿;精调结束后控制运输车执行直线倒车操作,当筒段法兰面和对接面接触时进行紧固操作。采用分段对接的方法,由远焦相机测量数据驱动底盘快速粗调,近焦相机驱动多自由度调整机构精确调整的接力式执行过程,在确保对接精度的前提下提升了对接速度。
技术研发人员:肖强,张亚博,刘明杰,郑建新,李海洲,邓志宝,卫瑞,魏东梁,曹向荣,孙明鸣
受保护的技术使用者:北京航天发射技术研究所
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!