一种基于层次推理模型的车辆变道行为预警方法
本发明涉及高级辅助驾驶和自动驾驶领域,具体地涉及一种基于层次推理模型的车辆变道行为预警方法。
背景技术:
1、无论对于高级辅助驾驶还是自动驾驶车辆,提前识别目标车辆可能的变道行为并实施减速操作,对保证安全性、提高舒适性具有重要意义。
2、在变道行为的不同阶段,需要通过不同特征来刻画。具体的:在距离变道时刻较早的阶段,目标车会频繁调整速度,以保证与本车道和目标车道内的其他车辆之间的安全间距;在接近变道时刻的阶段,目标车会产生明显的横向位置偏移和速度变化,以顺利切入目标车道。实现可靠的变道行为预警,需要充分考虑目标车不同阶段的运动特征。同时,考虑到在实际驾驶过程中,车道保持状态占据所有驾驶状态的绝大多数,因此,变道预警方法应保证较低的误报率,满足实际场景要求。综上所述,设计可靠的车辆变道行为预警方法,在保证低误报率的同时尽可能早地识别变道意图,是本领域研究的热点问题。
技术实现思路
1、鉴于上述问题,本发明提供了一种基于层次推理模型的车辆变道行为预警方法,以期能够至少解决上述技术问题之一。
2、根据本发明的第一个方面,提供了一种基于层次推理模型的车辆变道行为预警方法,其特征在于,包括:
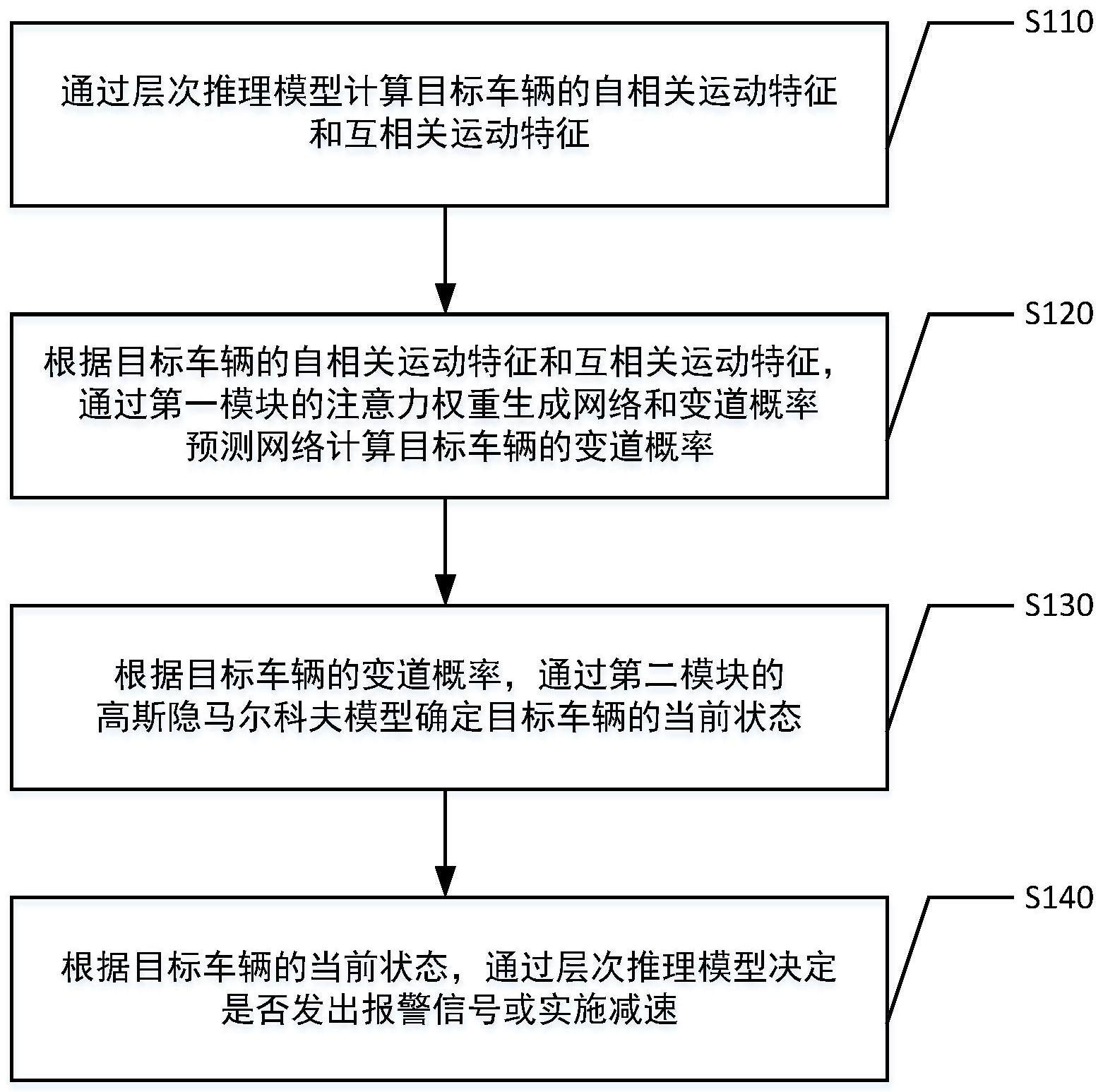
3、通过层次推理模型计算目标车辆的自相关运动特征和互相关运动特征,其中,层次推理模型包括第一模块和第二模块;
4、根据目标车辆的自相关运动特征和互相关运动特征,通过第一模块的注意力权重生成网络和变道概率预测网络计算目标车辆的变道概率;
5、根据目标车辆的变道概率,通过第二模块的高斯隐马尔科夫模型确定目标车辆的当前状态;
6、根据目标车辆的当前状态,通过层次推理模型决定是否发出报警信号或实施减速。
7、根据本发明的实施例,上述通过层次推理模型计算目标车辆的自相关运动特征和互相关运动特征包括:
8、根据目标车辆的纵向速度、横向速度、纵向加速度以及目标车辆与交界车道线间的距离,通过层次推理模型计算目标车辆的自相关运动特征;
9、通过层次推理模块将目标车辆的周围车辆的特征信息、目标车辆与周围车辆的相对纵向速度以及目标车辆与周围车辆的纵向距离进行向量拼接,得到目标车辆的互相关运动特征。
10、根据本发明的实施例,上述根据目标车辆的自相关运动特征和互相关运动特征,通过第一模块的注意力权重生成网络和变道概率预测网络计算目标车辆的变道概率包括:
11、通过注意力权重生成网络分别处理自相关运动特征和互相关运动特征,分别得到自相关运动特征的注意力权重和互相关运动特征的注意力权重;
12、通过变道概率预测网络的第一变道概率预测网络处理自相关运动特征,得到基于自相关特征的变道概率;
13、通过变道概率预测网络的第二变道概率预测网络处理互相关运动特征,得到基于互相关特征的变道概率;
14、通过第一模块将自相关运动特征的注意力权重和基于自相关特征的变道概率进行运算,得到自相关特征运算结果;
15、通过第一模块将互相关运动特征的注意力权重和基于互相关特征的变道概率进行运算,得到互相关特征运算结果;
16、通过第一模块将自相关特征运算结果和互相关特征运算结果进行向量运算,得到目标车辆的变道概率。
17、根据本发明的实施例,上述通过注意力权重生成网络分别处理自相关运动特征和互相关运动特征,分别得到自相关运动特征的注意力权重和互相关运动特征的注意力权重包括:
18、通过注意权重生成网络将自相关运动特征和互相关运动特征进行向量拼接,得到特征向量拼接结果;
19、通过注意力权重生成网络的可学习的全连接层对特征向量拼接结果进行分类处理,得到特征向量分类结果;
20、通过归一化指数函数处理特征向量分类结果,得到自相关运动特征的注意力权重和互相关运动特征的注意力权重。
21、根据本发明的实施例,上述通过变道概率预测网络的第一变道概率预测网络处理自相关运动特征,得到基于自相关特征的变道概率包括:
22、将当前时刻的自相关运动特征与上一时刻的第一变道概率预测网络的第一长短期记忆神经网络的隐状态进行向量拼接,得到当前时刻的自相关向量拼接结果;
23、将当前时刻的自相关向量拼接结果分别经第一长短期记忆神经网络的输入门和第一变道道概率预测网络的可学习的线性变换层进行处理,并将处理结果进行哈达玛乘积运算,得到第一哈达玛乘积;
24、将当前时刻的自相关向量拼接结果经第一长短期记忆神经网络的遗忘门进行处理,并将处理结果与上一时刻的第一长短期记忆神经网络的细胞状态进行哈达玛乘积运算,得到第二哈达玛乘积;
25、将第一哈达玛乘积和第二哈达玛乘积进行向量按元素相加运算,得到当前时刻的第一长短期记忆神经网络的细胞状态;
26、将当前时刻的自相关向量拼接结果经第一长短期记忆神经网络的输出门进行处理,得到第一处理结果;
27、将当前时刻的第一长短期记忆神经网络的细胞状态经第一变道道概率预测网络的可学习的线性变换层进行处理,得到第二处理结果;
28、将第一处理结果和第二处理结果进行哈达玛乘积运算,得到当前时刻的第一长短期记忆神经网络的隐状态;
29、将当前时刻的第一长短期记忆神经网络的隐状态经过多个非线性激活函数、多个第一变道概率预测网络的可学习的全连接层以及归一化函数处理,得到基于自相关特征的变道概率。
30、根据本发明的实施例,上述通过变道概率预测网络的第二变道概率预测网络处理互相关运动特征,得到基于互相关特征的变道概率包括:
31、将当前时刻的互相关运动特征与上一时刻的第二变道概率预测网络的第二长短期记忆神经网络的隐状态进行向量拼接,得到当前时刻的互相关向量拼接结果;
32、将当前时刻的互相关向量拼接结果分别经第二长短期记忆神经网络的输入门和第二变道道概率预测网络的可学习的线性变换层进行处理,并将处理结果进行哈达玛乘积运算,得到第三哈达玛乘积;
33、将当前时刻的互相关向量拼接结果经第二长短期记忆神经网络的遗忘门进行处理,并将处理结果与上一时刻的第二长短期记忆神经网络的细胞状态进行哈达玛乘积运算,得到第四哈达玛乘积;
34、将第三哈达玛乘积和第四哈达玛乘积进行向量按元素相加运算,得到当前时刻的第二长短期记忆神经网络的细胞状态;
35、将当前时刻的互相关向量拼接结果经第二长短期记忆神经网络的输出门进行处理,得到第三处理结果;
36、将当前时刻的第二长短期记忆神经网络的细胞状态经第二变道道概率预测网络的可学习的线性变换层进行处理,得到第四处理结果;
37、将第三处理结果和第四处理结果进行哈达玛乘积运算,得到当前时刻的第二长短期记忆神经网络的隐状态;
38、将当前时刻的第二长短期记忆神经网络的隐状态经过多个非线性激活函数、多个第二变道概率预测网络的可学习的全连接层以及归一化函数处理,得到基于互相关特征的变道概率。
39、根据本发明的实施例,上述根据目标车辆的变道概率,通过第二模块的高斯隐马尔科夫模型确定目标车辆的当前状态包括:
40、构建用于描述目标车辆状态变化的高斯隐马尔可夫模型,并对高斯马尔可夫模型进行参数初始化;
41、根据目标车辆的变道概率,构建从初始时刻到当前时刻的观测序列;
42、利用高斯隐马尔可夫模型处理观测序列,得到目标车的当前状态。
43、根据本发明的实施例,上述高斯隐马尔科夫模型的隐状态取值包括车道保持状态、报警状态以及变道状态;
44、基于鲍姆-韦尔奇算法并通过最大化观测序列的得分以求解高斯隐马尔科夫模型的参数。
45、根据本发明的实施例,上述根据目标车辆的当前状态,通过层次推理模型决定是否发出报警信号或实施减速包括:
46、在目标车辆的当前状态是车道保持状态的情况下,当前车辆的驾驶员或自动驾驶车辆执行原有操作;
47、在目标车辆的当前状态是报警状态的情况下,当前车辆的驾驶员或自动驾驶车辆执行适当减速操作;
48、在目标车辆的当前状态是变道状态的情况下,当前车辆的驾驶员或自动驾驶车辆执行立即减速操作。
49、根据本发明的实施例,上述第一模块的注意力权重生成网络和变道概率预测网络通过带焦点的交叉熵损失函数训练得到。
50、本发明设计一种基于层次推理模型的车辆变道行为预警方法,基于目标车辆自相关运动特征和互相关运动特征,利用变道概率预测网络和注意力权重生成网络计算变道概率;根据历史时刻的变道概率,构建目标车辆状态变化的高斯隐马尔可夫模型,获得当前时刻的最可能目标车辆状态;根据当前时刻的目标车状态,决定是否需要发送报警信号或执行减速动作,保证车辆行驶安全,提高了交通系统的效率。
- 还没有人留言评论。精彩留言会获得点赞!