商用车的车重确定方法、装置及电子设备、存储介质与流程
本申请涉及自动驾驶,尤其涉及一种商用车的车重确定方法、装置及电子设备、存储介质。
背景技术:
1、商用车主要包括,载货货车、牵引车-挂车等,然而车辆载重(车重)对于自动驾驶的横向控制精准度影响较大。
2、相关技术中,采用基于计算机视觉技术,通过图像识别出轮胎关键几何参数,估算出轮胎的载重后得到总车重。或者,也有基于最小二乘法,结合总纵向力和加速度数据计算总车重。
3、然而,相关技术中的方法准确性不高,且会存在较大误差。进一步,会影响到自动驾驶的横向控制。
技术实现思路
1、本申请实施例提供了一种商用车的车重确定方法、装置及电子设备、存储介质,以提高商用车的车重估计的精确性,降低计算误差。
2、本申请实施例采用下述技术方案:
3、第一方面,本申请实施例提供一种商用车的车重确定方法,其中,所述方法包括:
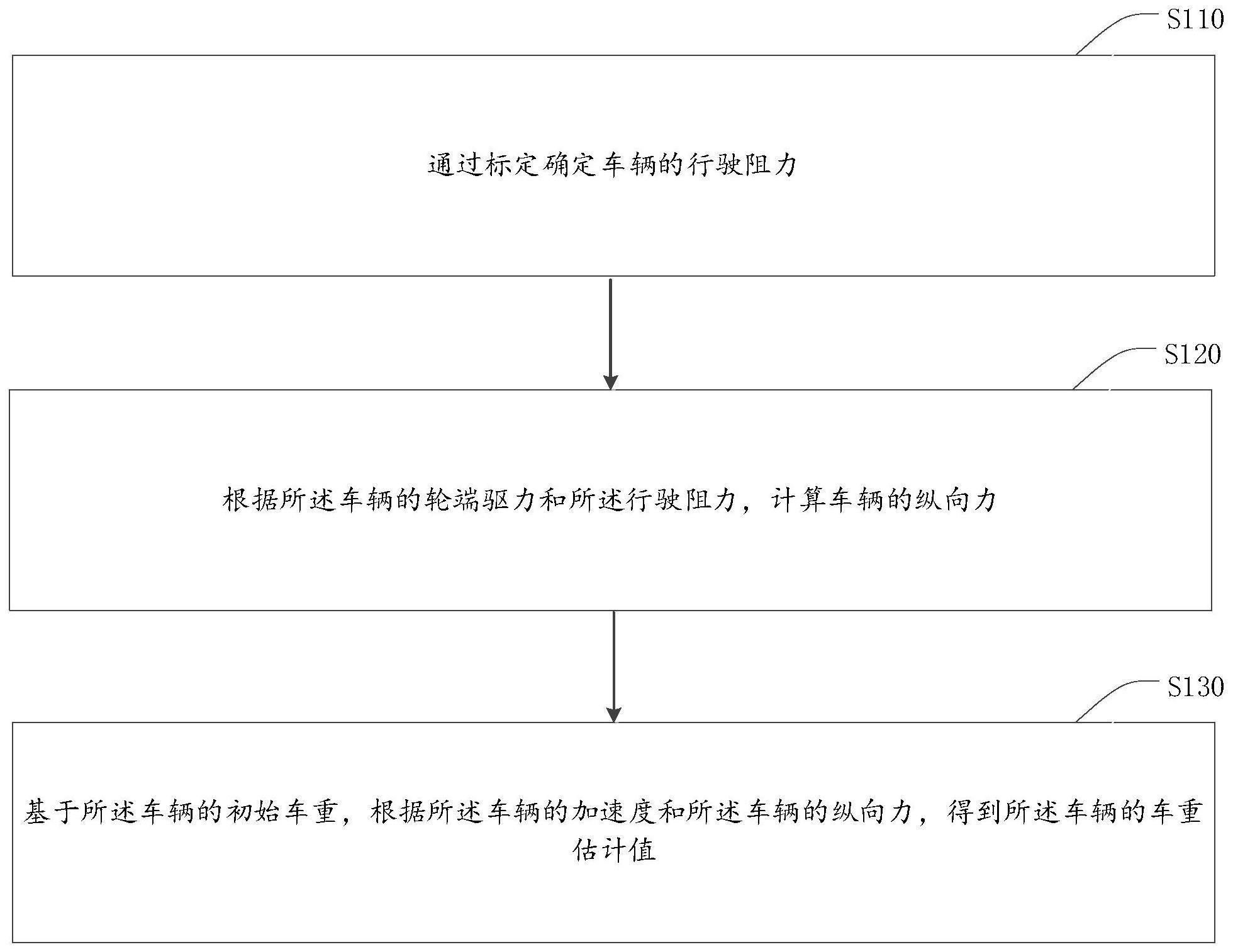
4、通过标定确定车辆的行驶阻力;
5、根据所述车辆的轮端驱力和所述行驶阻力,计算车辆的纵向力;
6、基于所述车辆的初始车重,根据所述车辆的加速度和所述车辆的纵向力,得到所述车辆的车重估计值。
7、在一些实施例中,所述方法还包括:
8、在所述车辆的加速度和所述车辆的纵向力均满足预设条件的情况下,计算得到第一车重并更新所述车辆的车重估计值;
9、在所述车辆的加速度和所述车辆的纵向力均满足预设条件的情况下,采用第一采样频率分别用第一队列容器存储所述车辆的纵向力的变化值、第二队列容器存储所述车辆的加速度的变化值;
10、基于每个队列容器中的最大队列容器存储数量max_size,对于经过采样存储的采样数据,存储距离当前时间最近的max_size以内的采样数据,弹出距离当前时间较远的采样数据。
11、在一些实施例中,所述车辆包括挂车和牵引车,所述方法还包括:
12、当所述挂车的挂车钩传感器的连接状态为连接,则所述车辆的初始车重包括所述牵引车和所述挂车的质量;
13、当所述挂车的挂车钩传感器的连接状态为未连接,则所述车辆的初始车重包括所述牵引车的质量;
14、当所述挂车的连接钩发生变化或者牵引车停车时长超过预设阈值时间后,弹出距离当前时间较远的采样数据,同时保留所述队列容器中最近的min_size个采样数据。
15、在一些实施例中,所述方法还包括:
16、根据所述第一队列容器中存储的采样数据个数,计算得到所述第二车重;
17、根据所述第二车重、所述第一车重以及不同队列容器中的采样数据个数,得到所述车辆的综合车重,其中,
18、当所述第一队列容器中存储的采样数据个数小于第一采样个数阈值时,将所述第一车重作为所述车辆的综合车重;
19、当所述第一队列容器中存储的采样数据个数大于第二采样个数阈值时,将所述第二车重作为所述车辆的综合车重;
20、当所述第一队列容器中存储的采样数据个数大于第一采样个数阈值小于第二采样个数阈值时,将所述第一车重和所述第二车重的综合计算结果作为所述车辆的综合车重。
21、在一些实施例中,所述通过标定确定车辆的行驶阻力,包括:
22、将车辆的预设轮端驱力转换为车辆的行驶阻力,得到不同车速下对应的行驶阻力;
23、分别采集多组不同载重的车速、行驶阻力的关系,标定得到车速、车重与所述行驶阻力之间的二维查表关系,标定结果作为所述车辆的行驶阻力。
24、在一些实施例中,所述根据所述车辆的轮端驱力和所述行驶阻力,计算车辆的纵向力,包括:
25、根据整车控制器vcu,得到车辆的实际轮端扭矩;
26、根据通过标定得到的车辆的行驶阻力、所述车辆的实际轮端扭矩以及车轮半径,计算得到所述车辆的纵向力,其中所述通过标定得到的车辆的行驶阻力通过二维查表关系(v,m_esti)查表得到,v为车速,m_esti为估算车重。
27、在一些实施例中,所述根据所述车辆的轮端驱力和所述行驶阻力,计算车辆的纵向力之后,还包括:
28、分别对所述车辆的加速度和所述车辆的纵向力进行均值滤波得到所述车辆的目标加速度和所述车辆的目标纵向力,其中所述车辆的目标加速度和所述车辆的目标纵向力均与迭代步长相关。
29、第二方面,本申请实施例还提供一种商用车的车重确定装置,其中,所述装置包括:
30、标定模块,用于通过标定确定车辆的行驶阻力;
31、第一计算模块,用于根据所述车辆的轮端驱力和所述行驶阻力,计算车辆的纵向力;
32、第二计算模块,用于基于所述车辆的初始车重,根据所述车辆的加速度和所述车辆的纵向力,得到所述车辆的车重估计值。
33、第三方面,本申请实施例还提供一种电子设备,包括:处理器;以及被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行上述方法。
34、第四方面,本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行上述方法。
35、本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:通过标定确定车辆的行驶阻力,然后根据所述车辆的轮端驱力和所述行驶阻力,计算车辆的纵向力。最后,基于所述车辆的初始车重,根据所述车辆的加速度和所述车辆的纵向力,得到所述车辆的车重估计值。通过上述方法,不仅能够快速得到初始车重估计值(满足实时性的要求),而且随着估算时间的延长,可以得到更加准确的更新车重估计值(满足准确、稳定性的要求)。
技术特征:
1.一种商用车的车重确定方法,其中,所述方法包括:
2.如权利要求1所述方法,其中,所述方法还包括:
3.如权利要求2所述方法,其中,所述车辆包括挂车和牵引车,所述方法还包括:
4.如权利要求2所述方法,其中,所述方法还包括:
5.如权利要求1所述方法,其中,所述通过标定确定车辆的行驶阻力,包括:
6.如权利要求5所述方法,其中,所述根据所述车辆的轮端驱力和所述行驶阻力,计算车辆的纵向力,包括:
7.如权利要求6所述方法,其中,所述根据所述车辆的轮端驱力和所述行驶阻力,计算车辆的纵向力之后,还包括:
8.一种商用车的车重确定装置,其中,所述装置包括:
9.一种电子设备,包括:
10.一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行所述权利要求1~7之任一所述方法。
技术总结
本申请公开了一种商用车的车重确定方法、装置及电子设备、存储介质,所述方法包括:通过标定确定车辆的行驶阻力;根据所述车辆的轮端驱力和所述行驶阻力,计算车辆的纵向力;基于所述车辆的初始车重,根据所述车辆的加速度和所述车辆的纵向力,得到所述车辆的车重估计值。通过本申请可以实现车重的在线估计,且提高车重估计的精确性,降低计算误差。
技术研发人员:贾春辉,丁峰,张东好,田山,魏守洋
受保护的技术使用者:北京京深深向科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!