车辆行驶坡度估算方法、装置及设备与流程
本申请属于汽车电子,尤其涉及一种车辆行驶坡度估算方法、装置及设备。
背景技术:
1、在车辆行驶过程中,车辆的辅助驾驶、制动和/或垂直控制等,通常都需要用到车辆行驶路面的坡度,也即行驶坡度。
2、目前,行驶中的车辆在进行坡度估算时,大多采用刚体模型进行分析,忽略了车身俯仰、侧倾、震荡等对坡度估算的影响,导致估算结果不够准确。
技术实现思路
1、本申请实施例提供一种车辆行驶坡度估算方法、装置、设备、存储介质及程序,能够准确的估算车辆的行驶坡度。
2、第一方面,本申请实施例提供了一种车辆行驶坡度估算方法,包括:
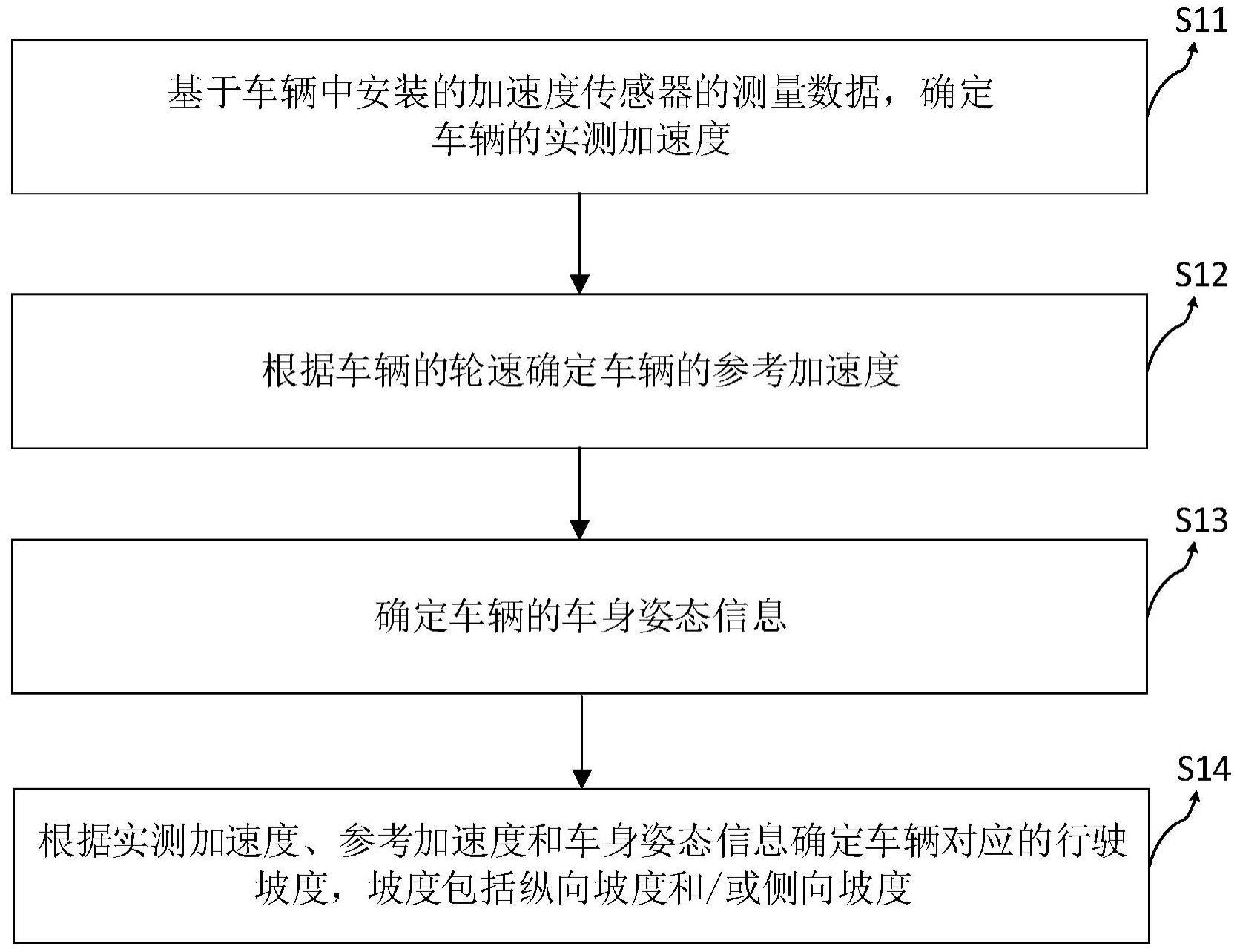
3、基于车辆中安装的加速度传感器的测量数据,确定车辆的实测加速度,
4、根据车辆的轮速确定车辆的参考加速度,
5、确定车辆的车身姿态信息,其中车身姿态信息包括悬架参考纵向坡度、车身俯仰角和/或车身滚转角,
6、根据实测加速度、参考加速度和车身姿态信息确定车辆对应的行驶坡度,坡度包括纵向坡度和/或侧向坡度。
7、第二方面,本申请实施例提供了一种车辆行驶坡度估算装置,包括:
8、实测加速度确定模块,用于基于车辆中安装的加速度传感器的测量数据,确定车辆的实测加速度,
9、参考加速度确定模块,用于根据车辆的轮速确定车辆的参考加速度,
10、车身姿态确定模块,用于确定车辆的车身姿态信息,其中车身姿态信息包括悬架参考纵向坡度、车身俯仰角和/或车身滚转角,
11、坡度确定模块,用于根据实测加速度、参考加速度和车身姿态信息确定车辆对应的行驶坡度,坡度包括纵向坡度和/或侧向坡度。
12、第三方面,本申请实施例提供了一种电子设备,所述设备包括:处理器以及存储有计算机程序指令的存储器,
13、所述处理器执行所述计算机程序指令时实现如第一方面所述的车辆行驶坡度估算方法。
14、第四方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现如第一方面所述的车辆行驶坡度估算方法。
15、第五方面,本申请实施例提供了一种计算机程序产品,所述计算机程序产品中的指令由电子设备的处理器执行时,使得所述电子设备执行如第一方面所述的车辆行驶坡度估算方法。
16、本申请实施例的车辆行驶坡度估算方法、装置、设备、存储介质及程序,基于车辆中安装的加速度传感器,确定车辆的实测加速度,根据车辆的轮速确定车辆的参考加速度,确定车辆的车身姿态信息,根据实测加速度、参考加速度和车身姿态信息确定车辆对应的行驶坡度,坡度包括纵向坡度和/或侧向坡度。根据本申请实施例,在对行驶坡度进行估算时,考虑了车身姿态对坡度估算的影响,相比传统方案,实现了更精确的坡度估算。
技术特征:
1.一种车辆行驶坡度估算方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于车辆中安装的加速度传感器,确定所述车辆的实测加速度,包括:
3.根据权利要求1或2所述的方法,其特征在于,所述根据所述车辆的轮速确定所述车辆的参考加速度,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据四个所述车轮对应的车速采用加权平均的方式确定参考车速,包括:
5.根据权利要求3所述的方法,其特征在于,所述确定所述车辆的车身姿态信息,包括:
6.根据权利要求5所述的方法,其特征在于,所述确定所述车辆的整车质量,包括:
7.根据权利要求5所述的方法,其特征在于,所述根据所述整车质量、所述整车质心高度和四个所述车轮的垂向力,确定所述车辆对应的悬架参考纵向坡度,包括:
8.根据权利要求3所述的方法,其特征在于,所述确定所述车辆的车身姿态信息,包括:
9.根据权利要求8所述的方法,其特征在于,所述根据四个所述车轮的高度信息,确定所述车辆对应的车身俯仰角和/或车身滚转角,包括:
10.根据权利要求5所述的方法,其特征在于,所述根据所述实测加速度、所述参考加速度和所述车身姿态信息确定所述车辆对应的行驶坡度,包括:
11.根据权利要求10所述的方法,其特征在于,所述根据所述悬架参考纵向坡度对所述第一纵向坡度进行修正得到第二纵向坡度,包括:
12.根据权利要求8所述的方法,其特征在于,所述车身姿态信息包括车身俯仰角和车身滚转角,所述根据所述实测加速度、所述参考加速度和所述车身姿态信息确定所述车辆对应的行驶坡度,包括:
13.根据权利要求1所述的方法,其特征在于,所述根据所述实测加速度、所述参考加速度和所述车身姿态信息确定所述车辆对应的行驶坡度之前,所述方法还包括:
14.一种车辆行驶坡度估算装置,其特征在于,包括:
15.一种电子设备,其特征在于,所述设备包括:处理器以及存储有计算机程序指令的存储器,
技术总结
本申请公开了一种车辆行驶坡度估算方法、装置及设备,基于车辆中安装的加速度传感器的测量数据,确定车辆的实测加速度,根据车辆的轮速确定车辆的参考加速度,确定车辆的车身姿态信息,根据实测加速度、参考加速度和车身姿态信息确定车辆对应的行驶坡度,坡度包括纵向坡度和/或侧向坡度。根据本申请实施例,在对行驶坡度进行估算时,考虑了车身姿态对坡度估算的影响,相比传统方案,实现了更精确的坡度估算。
技术研发人员:刘鑫,陈曦,王庆辉,王鹏
受保护的技术使用者:北京经纬恒润科技股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!