一种电动四驱转向稳定性控制方法、系统及车辆与流程
本发明涉及车辆控制,更具体地,涉及一种电动四驱转向稳定性控制方法、系统及车辆。
背景技术:
1、电动四驱是一种前后轮通过独立动力总成分别驱动的结构,见图1。前电机控制器接收动力电池的电能,将电能传输至前驱动电机,前驱动电机产生扭矩与转速,并传递至前减速器,前减速器将转速与扭矩传递至前轮。后电机控制器接收动力电池的电能,将电能传输至后驱动电机,后驱动电机产生扭矩与转速,并传递至后减速器,后减速器将转速与扭矩传递至后轮。当整车在路面上行驶时,在确定工况车速下,各自电机转速也是确定的,前后电机控制的本质是驱动转矩的分配,驱动转矩的分配将通过vcu模块输入。
2、一般情况下,电动四驱在转向行驶时,vcu模块将依据油门开度、车速确定一种固定的前后扭矩分配比例,以维持整车正常驾驶需求。当整车出现如图2所示的转向不足或转向过多时,esp模块触发,降低电机驱动扭矩,同时制动外侧或内侧车轮,以纠正整车姿态,使车辆保持安全。该控制方法可以保证整车安全,然而直接通过限扭和制动纠正整车姿态,整车通过车速将受到影响,同时制动单侧车轮降低了用户的驾驶体验。
3、现有技术中,申请号为:pct/cn2020/129825的发明专利公开了《电动四驱扭矩分配方法、系统及车辆》,该专利涉及一种电动四驱扭矩分配方法,包括获取整车总需求扭矩,根据行驶参数确定整车需求状态,并输出与所述整车需求状态对应的前后扭矩分配系数,车辆转向稳定性控制作为其中的一种。通过期望横摆角速度和实际横摆角速度的差值获得转向状态,并将转向状态作为pid计算的输入,获得对应的扭矩分配系数。该专利的技术方案对于转向状态的获得未考虑左右转向的方向,扭矩分配前需单独考虑左右转向状态。同时未提供期望横摆角速度算法,需要通过查询标定量表的方式进行扭矩分配,该分配方式准确性不高。上述方案未对转向稳定性控制区域进行划分,可能在低速及轻度转向的整车状态下,出现状态误判。
技术实现思路
1、本发明为结局上述现有技术存在的问题,提供一种电动四驱转向稳定性控制方法、系统及车辆,提高了电动四驱转向稳定性。
2、本发明的首要目的是为解决上述技术问题,本发明的技术方案如下:
3、本发明第一方面提供了一种电动四驱转向稳定性控制方法,包括以下步骤:
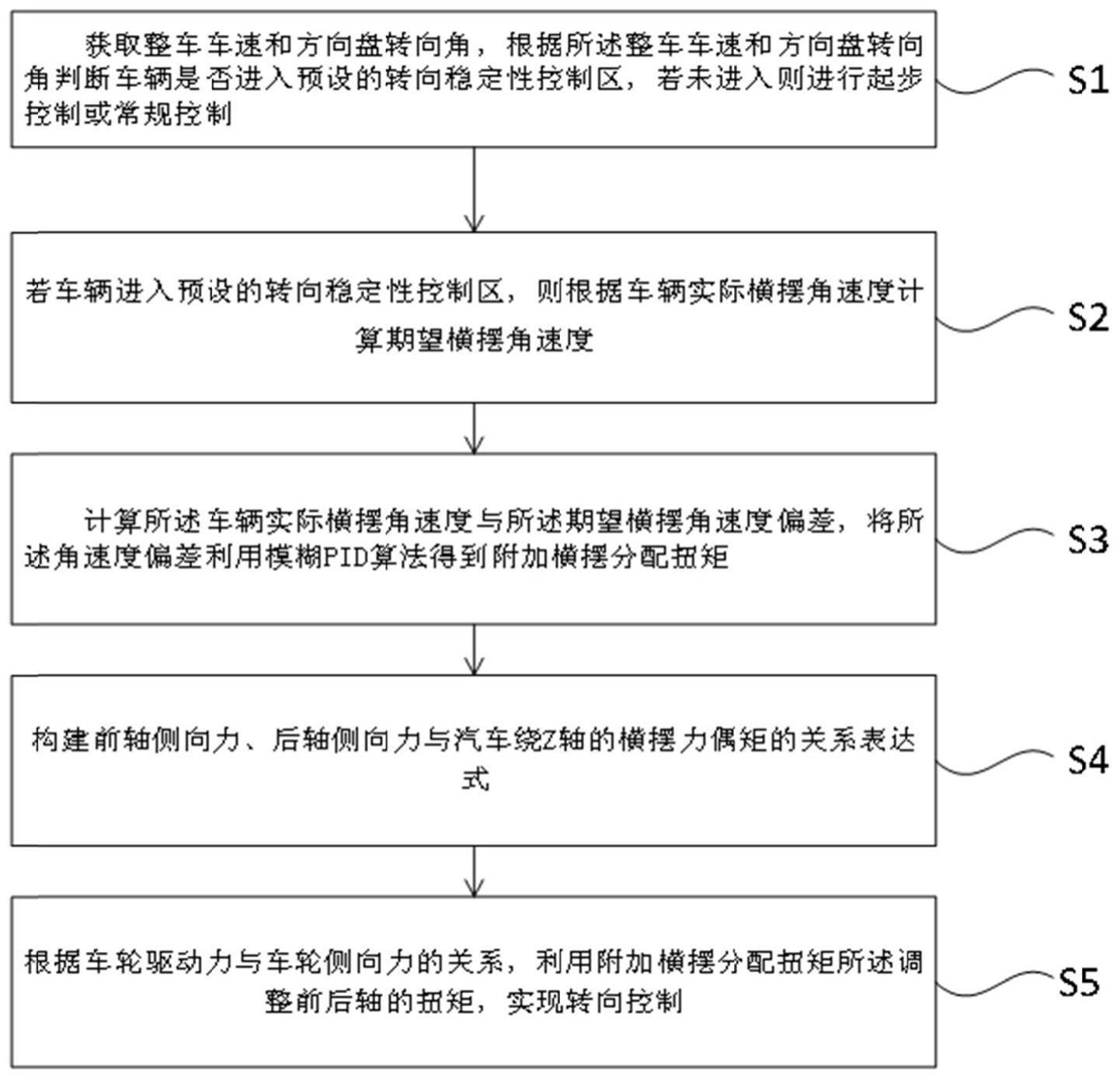
4、获取整车车速和方向盘转向角,根据所述整车车速和方向盘转向角判断车辆是否进入预设的转向稳定性控制区,若未进入则进行起步控制或常规控制;
5、若车辆进入预设的转向稳定性控制区,则根据车辆实际横摆角速度计算期望横摆角速度;
6、计算所述车辆实际横摆角速度与所述期望横摆角速度偏差,将所述角速度偏差利用模糊pid算法得到附加横摆分配扭矩;
7、构建前轴侧向力、后轴侧向力与汽车绕z轴的横摆力偶矩的关系表达式;
8、根据车轮驱动力与车轮侧向力的关系,利用附加横摆分配扭矩所述调整前后轴的扭矩,实现转向控制。
9、进一步的,根据所述整车车速和所述方向盘转角,将整车工作区域划分为:低车速区、弱转向区及转向稳定性控制区,其中,当车速小于或等于预设车速则整车工作区域记作低车速区域;当车速大于预设车速且方向盘转向角属于[-a,a],则整车工作区域记作弱转向区,其中,-a表示左转向角预设值,a表示右转向角预设值;当车速大于预设车速且方向盘转向角小于-a或大于a,则整车工作区域记作转向稳定性控制区。
10、进一步的,期望横摆角速度记作wrs,计算公式如下:
11、
12、其中,u为车速,lf为质心到前轴中心距,lr为质心到后轴中心距,cf为前轴侧偏刚度,cr为后轴侧偏刚度,m为整车质量,δ为前轴转角。
13、进一步的,车辆实际横摆角速度与期望横摆角速度偏差记作eωr,计算公式如下:
14、eωr=ign(ωr)·(ωrdes-ωr)
15、其中,eωr为转向不足度,sign(ωr)为横摆角速度符号值,ωr>0时,等于1;ωr=0时,等于1;ωr<0时,等于-1。
16、进一步的,前轴侧向力、后轴侧向力与汽车绕z轴的横摆力偶矩的关系表达式为:
17、fy1a-fy2b=mr
18、其中,fy1为前轴侧向力,fy2为后轴侧向力,a为质心到前轴中心距,b为质心到后轴中心距,mr为汽车绕z轴的横摆力偶矩。
19、进一步的,根据车轮驱动力与车轮侧向力的关系调整前后轴的扭矩,实现转向控制,具体为:
20、当转向不足时,则需要增大fy1,降低fy2,根据轮胎附着圆原理,为使fy1增大,需要降低前轴驱动力fx1。为使fy2降低,需要增大后轴驱动力fx2,根据驱动轴和驱动扭矩成正比,计算此时的附加横摆分配扭矩记作t不足,前轴驱动扭矩调整为t前-t不足,控制后轴驱动扭矩调整为t后+t不足;
21、进一步的,根据车轮驱动力与车轮侧向力的关系调整前后轴的扭矩,实现转向控制还包括:
22、当转向过度时,则需要降低fy1,增大fy2,根据轮胎附着圆原理,为使fy1降低,需要增大前轴驱动力fx1,为使fy2增大,需要降低后轴驱动力fx2,根据驱动轴和驱动扭矩成正比,计算此时的附加横摆分配扭矩记作t不足,t前+t过度,控制后轴驱动扭矩调整为t后-t过度。
23、进一步的,根据车轮驱动力与车轮侧向力的关系调整前后轴的扭矩,调整后的总分配扭矩与分配大小相同。
24、本发明第二方面提供了一种电动四驱转向稳定性控制系统,所述系统实现所述的电动四驱转向稳定性控制方法,该系统包括:数据获取模块、数据计算处理模块、附加横摆分配扭矩分配控制模块,所述数据获取模块、数据计算处理模块、附加横摆分配扭矩分配控制模块依次通信连接,其中,所述数据获取模块用于获取整车车速和方向盘转向角;所述计算处理模块用于得到附加横摆分配扭矩,所述附加横摆分配扭矩分配控制模块用于根据根据车轮驱动力与车轮侧向力的关系,利用附加横摆分配扭矩所述调整前后轴的扭矩,实现转向控制
25、进一步的,所述数据计算处理模块包括:整车工作区域判断模块、期望横摆角速度计算模块、附加横摆分配扭矩计算模块,侧向力与横摆力偶矩关系构建模块,所述整车工作区域判断模块、期望横摆角速度计算模块、附加横摆分配扭矩计算模块,侧向力与横摆力偶矩关系构建模块依次通信连接,其中,整车工作区域判断模块用于根据所述整车车速和所述方向盘转角划分整车工作区域,所述期望横摆角速度计算模块用于期望横摆角速度的计算,所述附加横摆分配扭矩计算模块用于根据将车辆实际横摆角速度与期望横摆角速度偏差计算得到附加横摆分配扭矩,所述侧向力与横摆力偶矩关系构建模块用于构建侧向力与横摆力偶矩关系。
26、进一步的,所述附加横摆分配扭矩分配控制模块包括:转向不足分配控制模块和转向过度分配控制模块,所述转向不足分配控制模块用于当车辆当转向不足时进行扭矩的分配,所述转向过度分配控制模块用于当车辆转向过度时进行扭矩分配。
27、本发明第三方面提供了一种车辆,包括车体,在所述车体上安装有所述的电动四驱转向稳定性控制系统。
28、与现有技术相比,本发明技术方案的有益效果是:
29、本发明利用车辆实际横摆角速度与期望横摆角速度偏差得到附加横摆分配扭矩,根据前后轴侧向力与前后轴驱动力的关系对附加横摆分配扭矩进行分配,无需单独考虑左右转向状态,实现了定量的扭矩分配,克服了传统方式通过查询标定量表的方式进行分配准确性不高的缺陷,本发明扭矩响应结果更准确,更有利于在其它车型上推广,减轻后续同类车型工作量;此外本发明还通过在预设的转向稳定性控制区进行转向控制,提高了转向控制的准确性。
- 还没有人留言评论。精彩留言会获得点赞!