车辆加速方法、车辆加速装置以及车辆与流程
本申请涉及新能源汽车,特别是涉及一种车辆加速方法、车辆加速装置以及车辆。
背景技术:
1、基于新能源汽车的电机特性,使得其具备动力性、经济性等优势。但是,由于电机齿轮的啮合特性,当齿轮旋转方向由正转变为反转或由反转为正转时,可能出现车身振动等问题,存在影响车辆可靠性以及驾驶性的风险,还会影响驾驶员及乘客的使用体验。
2、通常来说,会在实际扭矩在过零附近时降低扭矩变化率,以有利于保障降低噪音同时符合平顺性。但是,由于扭矩的降低,导致车辆的动力响应性被削弱,容易出现车辆扭矩过零时动力响应性不足的情况。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够在一电机扭矩过零时,将处于过量状态的电机的部分目标转移至另一电机,从而在改善车辆平顺性的同时降低对动力响应性的影响的车辆加速方法、车辆加速装置以及车辆。
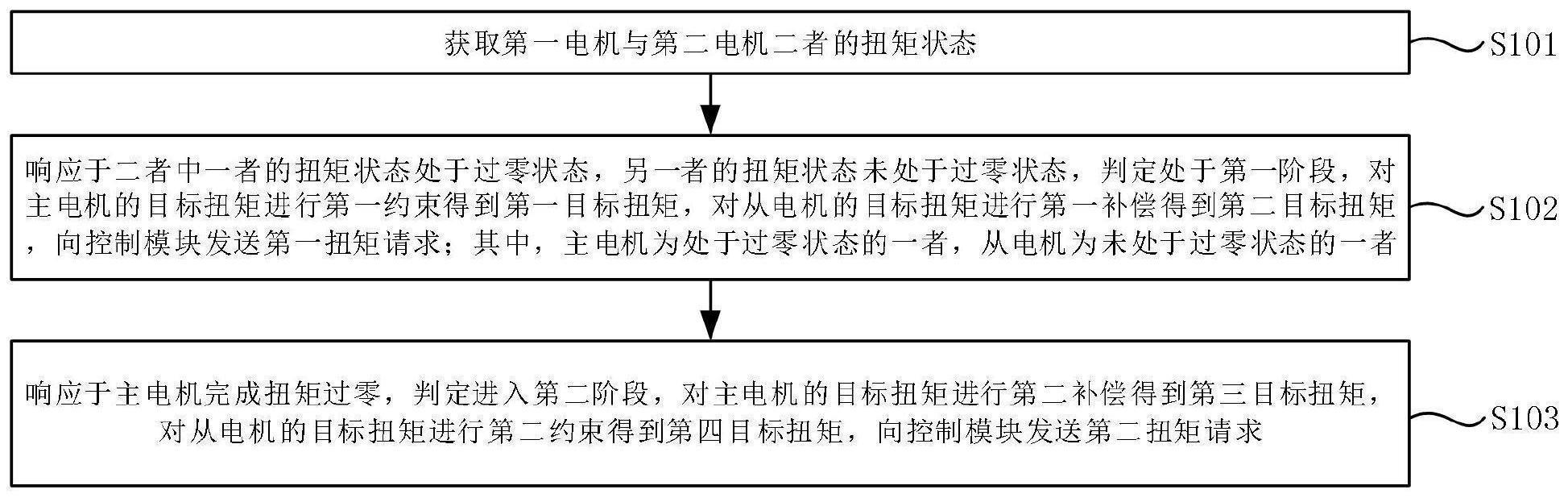
2、一方面,提供一种车辆加速方法,车辆加速方法包括:获取第一电机与第二电机二者的扭矩状态;响应于二者中一者的扭矩状态处于过零状态,另一者的扭矩状态未处于过零状态,判定处于第一阶段,对主电机的目标扭矩进行第一约束得到第一目标扭矩,对从电机的目标扭矩进行第一补偿得到第二目标扭矩,向控制模块发送第一扭矩请求;其中,主电机为处于过零状态的一者,从电机为未处于过零状态的一者;响应于主电机完成扭矩过零,判定进入第二阶段,对主电机的目标扭矩进行第二补偿得到第三目标扭矩,对从电机的目标扭矩进行第二约束得到第四目标扭矩,向控制模块发送第二扭矩请求。
3、在本申请的一实施例中,对主电机的目标扭矩进行第一约束得到第一目标扭矩,对从电机的目标扭矩进行第一补偿得到第二目标扭矩包括:将主电机的初始目标扭矩减去第一转移扭矩,得到第一目标扭矩;将从电机的初始目标扭矩叠加第一转移扭矩,得到第二目标扭矩。
4、在本申请的一实施例中,第一约束以及第一补偿为周期性进行的;第一转移扭矩为主电机的前次初始目标扭矩与主电机的前次请求扭矩的差值。
5、在本申请的一实施例中,对主电机的目标扭矩进行第二补偿得到第三目标扭矩,对从电机的目标扭矩进行第二约束得到第四目标扭矩包括:将第二转移扭矩自从电机的初始目标扭矩转移至主电机的初始目标扭矩,得到主电机的第三目标扭矩以及从电机的第四目标扭矩。
6、在本申请的一实施例中,第二转移扭矩为扭矩因子与累计转移扭矩的差值;其中,累计转移扭矩为第一阶段累计补偿至的从电机的扭矩量;扭矩因子为累计转移扭矩与时间因子的乘积,时间因子为预设第二阶段持续的时长阈值与车辆控制器的工作频率的比值。
7、在本申请的一实施例中,车辆加速方法还包括:
8、解析与车速、前次请求扭矩相匹配的平顺因子;
9、解析与目标扭矩相匹配的修正因子;其中,目标扭矩包括第一目标扭矩、第二目标扭矩、第三目标扭矩以及第四目标扭矩中的至少一者;
10、结合修正因子以及平顺因子二者对目标扭矩进行第三约束,得到当前请求扭矩;其中,当当前请求扭矩为基于第一目标扭矩或第二目标扭矩得到的时,利用当前请求扭矩向控制模块发送第一扭矩请求;当当前请求扭矩为基于第三目标扭矩或第四目标扭矩得到的时,利用当前请求扭矩向控制模块发送第二扭矩请求。
11、在本申请的一实施例中,车辆加速方法还包括:响应于第一电机与第二电机二者中一者进入过零状态,则开始累计扭矩过零的运行时长;当运行时长超过预设时长或主电机的初始目标扭矩小于预设扭矩,则触发过零退出状态,将初始目标扭矩作为请求扭矩向电机控制模块发送第三扭矩请求。
12、在本申请的一实施例中,车辆加速方法还包括:响应于初次判定处于第一阶段和/或第二阶段补偿主电机的扭矩量与第一阶段补偿从电机的扭矩量匹配,对目标扭矩进行滤波处理,直至目标扭矩与请求扭矩二者的差值小于扭矩阈值;其中,目标扭矩包括第一目标扭矩、第二目标扭矩、第三目标扭矩以及第四目标扭矩中的至少一者。
13、另一方面,提供了一种车辆加速装置,车辆加速装置包括:获取模块以及控制模块;获取模块用于获取第一电机与第二电机二者的扭矩状态;控制模块与获取模块连接,用于实现上述任一项实施例中的车辆加速方法;实现以下步骤:获取第一电机与第二电机二者的扭矩状态;响应于二者中一者的扭矩状态处于过零状态,另一者的扭矩状态未处于过零状态,判定处于第一阶段,对主电机的目标扭矩进行第一约束得到第一目标扭矩,对从电机的目标扭矩进行第一补偿得到第二目标扭矩,向控制模块发送第一扭矩请求;其中,主电机为处于过零状态的一者,从电机为未处于过零状态的一者;响应于主电机完成扭矩过零,判定进入第二阶段,对主电机的目标扭矩进行第二补偿得到第三目标扭矩,对从电机的目标扭矩进行第二约束得到第四目标扭矩,向控制模块发送第二扭矩请求。
14、再一方面,提供了一种车辆,车辆包括:车辆加速装置、第一电机、第二电机以及电机控制模块;车辆加速装置如上述实施例中所阐述的;电机控制模块与车辆加速装置、第一电机以及第二电机连接,电机控制模块接收第一扭矩请求以及第二扭矩请求,按照第一扭矩请求以及第二扭矩请求调节第一电机以及第二电机的扭矩。
15、上述车辆加速方法、车辆加速装置以及车辆,车辆具有第一电机以及第二电机,并在第一电机和第二电机中一者处于过零状态,另一者未处于过零状态时触发加速调节。将需要扭矩过零的一者作为主电机,另一者作为从电机,加速调节包括第一阶段以及第二阶段。在第一阶段内,对主电机的目标扭矩进行第一约束,以有利于改善车辆的平顺性,对从电机的目标扭矩进行第一补偿,缩减第一电机和第二电机总扭矩的落差,以对动力响应性进行补偿,从而降低对动力响应性的影响。并在主电机完成扭矩过零后,进入第二阶段,对主电机的目标扭矩进行第二补偿,对从电机进行第二约束,以令主电机与从电机的扭矩与工况需求相符,满足车辆的动力需求。
技术特征:
1.一种车辆加速方法,其特征在于,所述车辆加速方法包括:
2.根据权利要求1所述的车辆加速方法,其特征在于,所述对主电机的目标扭矩进行第一约束得到第一目标扭矩,对从电机的目标扭矩进行第一补偿得到第二目标扭矩包括:
3.根据权利要求2所述的车辆加速方法,其特征在于,所述第一约束以及所述第一补偿为周期性进行的;
4.根据权利要求1所述的车辆加速方法,其特征在于,所述对所述主电机的目标扭矩进行第二补偿得到第三目标扭矩,对所述从电机的目标扭矩进行第二约束得到第四目标扭矩包括:
5.根据权利要求4所述的车辆加速方法,其特征在于,所述第二转移扭矩为扭矩因子与累计转移扭矩的差值;
6.根据权利要求1所述的车辆加速方法,其特征在于,所述车辆加速方法还包括:
7.根据权利要求1所述的车辆加速方法,其特征在于,所述车辆加速方法还包括:
8.根据权利要求1所述的车辆加速方法,其特征在于,所述车辆加速方法还包括:
9.一种车辆加速装置,其特征在于,所述车辆加速装置包括:
10.一种车辆,其特征在于,所述车辆包括:
技术总结
本申请涉及新能源汽车技术领域,特别是涉及一种车辆加速方法、车辆加速装置以及车辆。车辆加速方法包括:获取第一电机与第二电机二者的扭矩状态;判定处于第一阶段,对主电机的目标扭矩进行第一约束得到第一目标扭矩,对从电机的目标扭矩进行第一补偿得到第二目标扭矩;主电机为处于过零状态的一者,从电机为未处于过零状态的一者;响应于主电机完成扭矩过零,判定进入第二阶段,对主电机的目标扭矩进行第二补偿得到第三目标扭矩,对从电机的目标扭矩进行第二约束得到第四目标扭矩。采用本方法在一电机扭矩过零时,将处于过量状态的电机的部分目标转移至另一电机,从而在改善车辆平顺性的同时降低对动力响应性的影响。
技术研发人员:李良浩,张正萍,黄大飞,刘小飞,唐如意,崔环宇,谭开波
受保护的技术使用者:赛力斯汽车有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!