一种全地形移动机器人主动车身稳定机构
本发明涉及一种全地形移动机器人主动车身稳定机构,属于移动机器人。
背景技术:
1、由于全地形移动机器人作业环境复杂,行走过程中车身稳定性较差,其车身这种不稳定性会影响到其在户外作业的精度、车身负载能力及其驱动电机输出功率,特别是对其稳定性及其负载能力要求较高的场合。例如移动机器人携带仿生机械臂在户外进行智能抓取,移动机器人携带摄像头在户外进行地形勘测,这些都是对移动机器人稳定性要求较高的场合。移动机器人在复杂路面上行驶过程中,导致车轮高低不一致,使车身发生较大的晃动,导致其作业失败。
2、如中国专利申请号201711490143.5的一种移动机器人稳定机构及装有该稳定机构的移动机器人包括两套分别设置在移动机器人左右两侧的支撑机构,支撑机构包括升降支柱和升降机构,升降支柱在升降机构的作用下上下移动以抬升移动机器人离开地面或将移动机器人降至地面。此结构在移动机器人静止工作过程中有效提高了机器人车身稳定性,但在移动机器人移动作业难以起作用,并且此专利未有减振机构,只适用于在室内作业。
3、如中国专利申请号201911097045.4的一种全地形移动机器人的平衡系统及其控制方法其中全地形移动机器人的平衡系统包括分别设置于移动机器人上的控制芯片、重力传感器、陀螺仪、关节电机和移动电机;所述重力传感器和陀螺仪获得的数据整合成所述平衡数据,平衡数据存储于数据库上,重力传感器和陀螺仪分别通过数据库连接控制芯片;所述关节电机和/或移动电机连接控制芯片,且受控于控制芯片。本全地形移动机器人的平衡系统使移动机器人能适应较多地形,且能使移动机器人输出驱动力矩趋于一致,将驱动力更有效转化为牵引力,提升路面通过性。但此平衡系统未有机械机构来保障车身稳定性,在作业地形复杂的情况下难以解决驱动力矩输出和车身平衡问题。
技术实现思路
1、为解决上述技术问题,本发明提供一种全地形移动机器人主动车身稳定机构,针对于不同路况自主选择主动与被动控制方法对车身稳定性进行控制。
2、为实现上述目的,本发明采用如下技术方案:
3、一种全地形移动机器人主动车身稳定机构,其特征在于:包括桁架车身模块、双横臂式减振悬架及车身稳定机构模块;所述车身稳定机构模块包括稳定减振器下支座、稳定机构底座、滑轨安装竖板、滑块、滑轨、作动器、作动器安装板、作动器连接l型板、稳定减振器上支座、稳定减振器,
4、所述稳定机构底座安装在桁架车身模块的桁架车身前后部上方,所述滑轨安装竖板安装在稳定机构底座上,所述滑轨安装在滑轨安装竖板上并连接有滑块,所述稳定减振器上支座安装在滑块上并连接有作动器连接l型板,所述滑轨的顶部安装有作动器安装板,所述的作动器安装在作动器安装板上并与作动器连接l型板连接,所述稳定减振器上端与稳定减振器上支座连接,下端与稳定减振器下支座连接,所述稳定减振器下支座与双横臂式减振悬架的上u型摆臂连接,稳定减振器左右两侧对称设置,并与桁架车身、双横臂式减振悬架的悬架减振器构成一个柔性等腰三角形。
5、进一步的,所述桁架车身模块包括桁架车身、位于桁架车身左右两侧悬挂上的安装板。
6、进一步的,所述双横臂式减振悬架模块包括上u型摆臂、下u型摆臂,所述上u型摆臂、下u型摆臂一端铰接有摆臂下支座,所述摆臂下支座与悬挂下安装板固定,所述上u型摆臂、下u型摆臂远离悬挂下安装板的一端铰接有摆臂上支座,所述摆臂上支座与桁架车身模块的悬挂上安装板固定,所述上u型摆臂上安装有悬架减振器下支座,所述悬架减振器下支座上配合有悬架减振器,所述悬架减振器远离悬架减振器下支座的一端与桁架车身模块上悬架减振器上支座配合,所述上u型摆臂与车身稳定机构模块配合。
7、本发明的车身稳定机构有效与悬架减振机构相融合,不影响其减振性能,同时提升驱动力矩平衡与车身稳定性,车身稳定系统在需要时才会介入工作,并且适用范围广,同时其可根据路况主动调节稳定系统介入程度以精准控制车身稳定性。
8、说明书附图
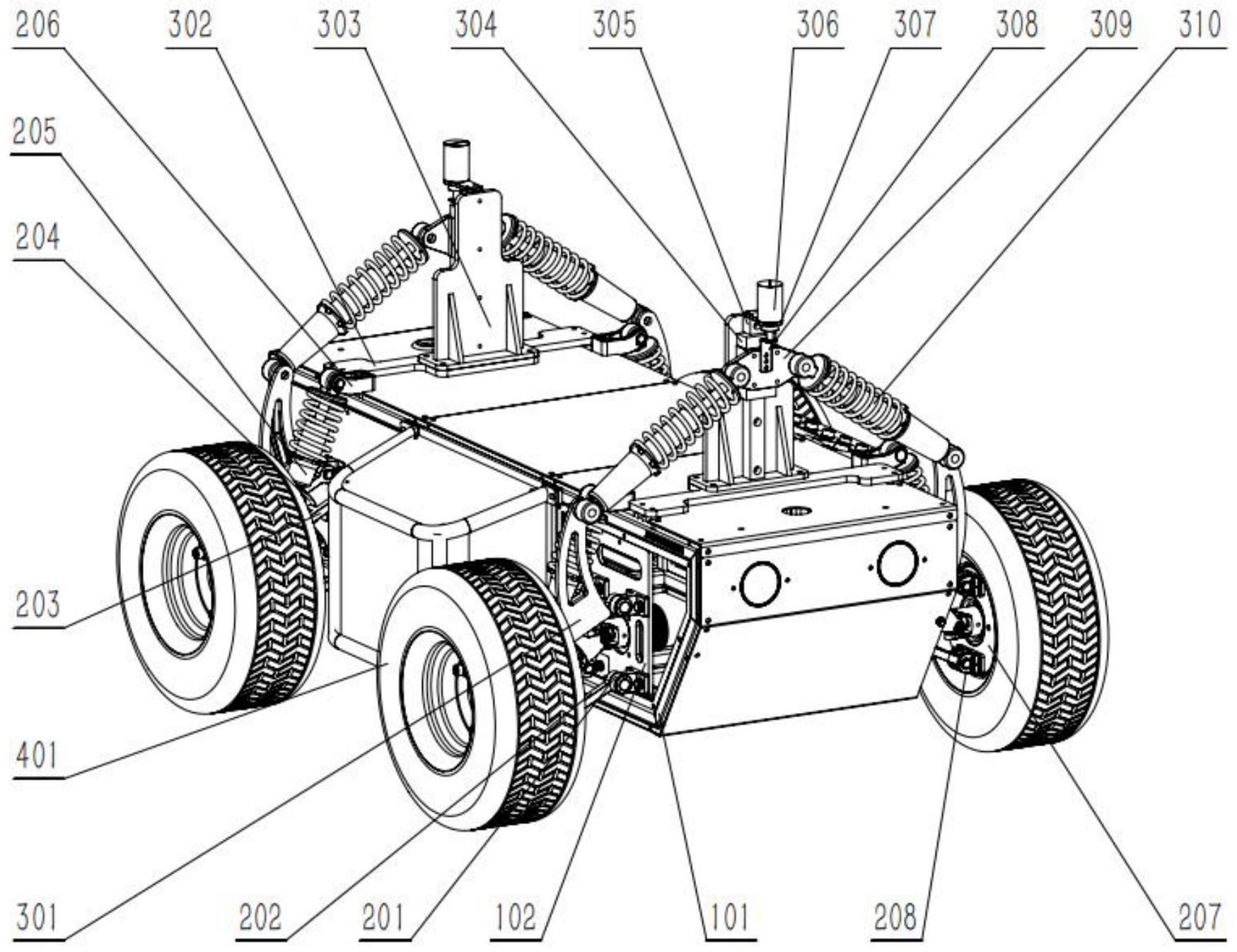
9、图1是本发明所涉及全地形移动机器人结构图;
10、图2是本发明稳定机构模块结构图。
11、图中,101、桁架车身,102、悬挂上安装板,201、摆臂上支座,202、下u型摆臂,203、上u型摆臂,204、悬架减振器下支座,205、悬架减振器,206、悬架减振器上支座,207、悬挂下安装板,208、摆臂下支座,301、稳定减振器下支座,302、稳定机构底座,303、滑轨安装竖板,304、滑块,305、滑轨,306、作动器,307、作动器安装板,308、作动器连接l型板,309、稳定减振器上支座,310、稳定减振器。
技术特征:
1.一种全地形移动机器人主动车身稳定机构,其特征在于:包括桁架车身模块、双横臂式减振悬架及车身稳定机构模块;所述车身稳定机构模块包括稳定减振器(310)下支座(301)、稳定机构底座(302)、滑轨(305)安装竖板(303)、滑块(304)、滑轨(305)、作动器(306)、作动器(306)安装板、作动器(306)连接l型板、稳定减振器(310)上支座(309)、稳定减振器(310),
2.根据权利要求1所述的一种全地形移动机器人主动车身稳定机构,其特征在于:所述桁架车身模块包括桁架车身(101)、位于桁架车身左右两侧的悬挂上安装板(102)。
3.根据权利要求1所述的一种全地形移动机器人主动车身稳定机构,其特征在于:所述双横臂式减振悬架模块包括上u型摆臂(203)、下u型摆臂(202),所述上u型摆臂(203)、下u型摆臂(202)一端铰接有摆臂下支座(208),所述摆臂下支座(208)与悬挂下安装板(207)固定,所述上u型摆臂(203)、下u型摆臂(202)远离悬挂下安装板(207)的一端铰接有摆臂上支座(201),所述摆臂上支座(201)与桁架车身模块的悬挂上安装板(102)(102)固定,所述上u型摆臂(203)上安装有悬架减振器(205)下支座(204),所述悬架减振器(205)下支座(204)上配合有悬架减振器(205),所述悬架减振器(205)远离悬架减振器(205)下支座(204)的一端与桁架车身模块上悬架减振器(205)上支座配合,所述上u型摆臂(203)与车身稳定机构模块配合。
技术总结
本发明涉及一种全地形移动机器人主动车身稳定机构,属于移动机器人技术领域。包括桁架车身模块、双横臂式减振悬架及车身稳定机构模块;所述车身稳定机构模块包括稳定减振器下支座、稳定机构底座、滑轨安装竖板、滑块、滑轨、作动器、作动器安装板、作动器连接L型板、稳定减振器上支座、稳定减振器,稳定减振器下支座与双横臂式减振悬架的上U型摆臂连接,稳定减振器左右两侧对称设置,并与桁架车身、双横臂式减振悬架的悬架减振器构成一个柔性等腰三角形。本发明的车身稳定机构有效与悬架减振机构相融合,不影响其减振性能,同时提升驱动力矩平衡与车身稳定性,车身稳定系统在需要时才会介入工作,并且适用范围广,同时其可根据路况主动调节稳定系统介入程度以精准控制车身稳定性。
技术研发人员:汪步云,赵兵,胡汉春,杨鸥,章文誉,许德章
受保护的技术使用者:安徽工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!