一种车速控制的控制方法、装置、车速控制器及介质与流程
本技术涉及车速控制的,尤其是涉及一种车速控制的控制方法、装置、车速控制器及介质。
背景技术:
1、随着我国的汽车工业的迅猛发展,汽车保有量大幅上升,汽车已成为人们的重要交通工具。同时,当前的道路交通安全形势严峻,与汽车有关的交通事故也大幅上升。
2、目前,在我国发生交通事故的主要原因是机动车驾驶员违章驾驶,其中超速行驶是一个重要因素。目前控制汽车超速的方法和手段主要是利用摄像头对超速车辆进行拍照,而后根据拍照结果进行处罚,这是一种被动的控制超速的手段,不能及时有效提醒驾驶员进行减速,在未设置摄像头的路段更是无法进行监控,不能实时了解车速状况。因此衍生出了汽车车速记录仪,其虽然能够记录汽车整个行驶过程的车速信息,但是也只能在事后查看结果,主要是用于判断事故发生的原因,无法在不同路段主动提醒驾驶员控制车速预防事故。
技术实现思路
1、为了解决以上至少一项技术问题,本技术提供了一种车速控制的控制方法、装置、车速控制器及介质。
2、第一方面,本技术提供一种车速控制的控制方法,采用如下的技术方案:
3、一种车速控制器的控制方法,包括:
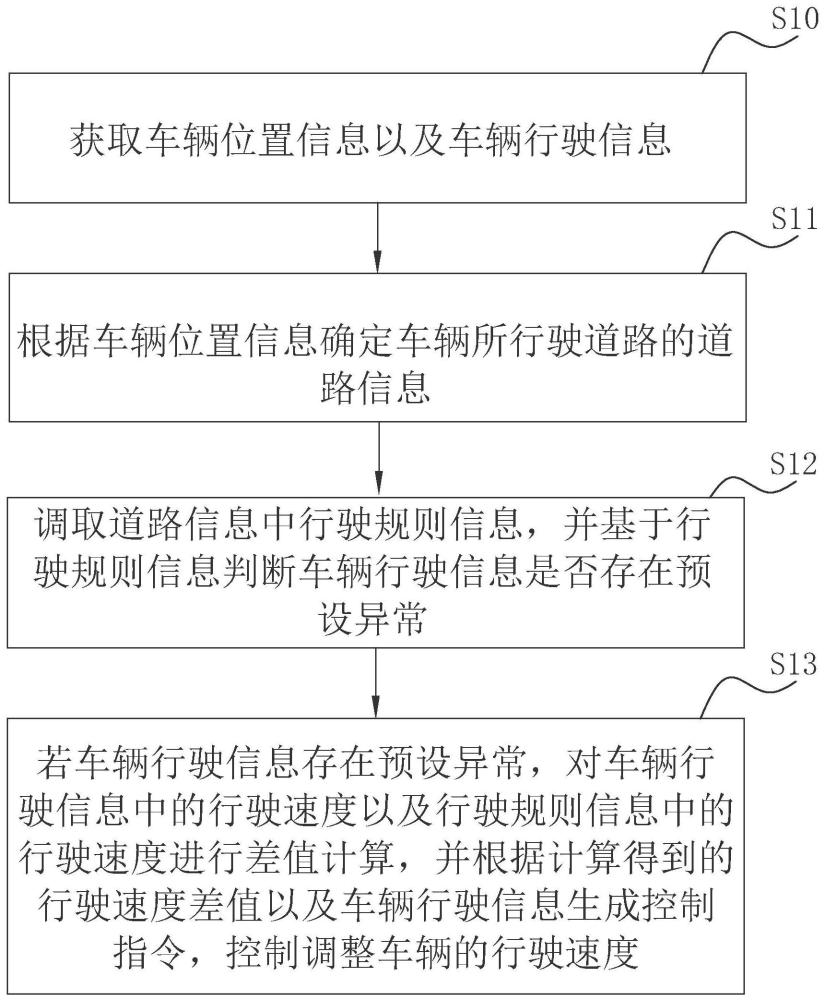
4、获取车辆位置信息以及车辆行驶信息,所述车辆位置信息用于表示当前车辆在行驶状态下的位置信息;
5、根据所述车辆位置信息确定所述车辆所行驶道路的道路信息;
6、调取所述道路信息中行驶规则信息,并基于所述行驶规则信息判断所述车辆行驶信息是否存在预设异常;
7、若所述车辆行驶信息存在所述预设异常,则对所述车辆行驶信息中的行驶速度以及所述行驶规则信息中的行驶速度进行差值计算,并根据计算得到的行驶速度差值以及所述车辆行驶信息生成控制指令,控制调整所述车辆的行驶速度。
8、本技术在一较佳示例中可以进一步配置为:所述对所述车辆行驶信息中的行驶速度以及所述行驶规则信息中的行驶速度进行差值计算,还包括:
9、获取当前图像信息,所述当前图像信息用于表示所述道路信息的遥感图像信息;
10、基于所述车辆行驶信息确定当前加速度;
11、对所述车辆行驶信息、所述行驶规则信息以及所述当前图像信息进行分析,得到标准加速度范围;
12、判断所述当前加速度在未来预设时间段内是否符合所述标准加速度范围,若不符合,则计算所述当前加速度与所述标准加速度范围中与所述当前加速度相近加速度之间的加速度差值,并根据所述加速度差值生成调整指令,控制所述当前加速度符合所述标准加速度范围值。
13、本技术在一较佳示例中可以进一步配置为:所述对所述车辆行驶信息、所述行驶规则信息以及所述遥感图像信息进行分析,得到标准加速度范围,包括:
14、获取历史行驶信息以及当前环境信息,所述历史行驶信息用于表示所述车辆在预设历史时间段内不同环境天气下按照所述行驶规则信息中最高行驶速度以及最低行驶速度行驶在不同道路类型所对应的行驶信息,所述当前环境信息用于表示当前所述车辆所处的环境天气信息;
15、基于所述当前图像信息进行三维道路模拟,得到三维道路模型;
16、将所述车辆行驶信息、所述行驶规则信息以及所述当前环境信息分别与所述三维道路模型进行融和更新,得到实时道路模型;
17、根据所述实时道路模型确定所述车辆在预设未来时间段内的行驶道路信息;
18、根据所述历史行驶信息以及所述行驶道路信息对所述车辆的行驶加速度进行分析,得到所述预设未来时间段内所述车辆的标准加速度范围。
19、本技术在一较佳示例中可以进一步配置为:所述根据所述历史行驶信息以及所述行驶道路信息对所述车辆的行驶加速度进行分析,得到所述预设未来时间段内所述车辆的标准加速度范围,包括:
20、对所述历史行驶信息进行分析,确定所述历史行驶信息中不同天气类型以及不同道路类型在每种天气类型以及所述行驶规则信息的基础上对应的加速度范围,并基于所述天气类型以及所述加速度范围对所述历史行驶信息进行无监督时间序列数据整理,得到第一行驶矩阵数据;
21、将所述第一行驶矩阵数据输入至训练好的向量模型进行向量特征提取,得到行驶特征维度数量,并将得到的所述行驶特征维度数量与所述第一行驶矩阵数据进行数据结合处理,生成第二行驶矩阵数据;
22、对所述第二行驶矩阵数据中所包含的数据进行数据处理,得到行驶数据,并将得到的所述行驶数据输入至预设算法模型中进行数据推算,生成每种天气类型对应的不同道路类型在所述预设未来时间段内的加速度范围;
23、将所述行驶道路信息中的道路信息以及未来天气信息分别与不同所述道路类型以及所述天气类型进行匹配,得到所述预设未来时间段内所述车辆的标准加速度范围。
24、本技术在一较佳示例中可以进一步配置为:所述将得到的所述行驶特征维度数量与所述第一行驶矩阵数据进行数据结合处理,生成第二行驶矩阵数据,包括:
25、将所述行驶特征维度数量与所述第一行驶矩阵数据进行整合,生成行驶维度矩阵数据;
26、对所述行驶维度矩阵数据进行基本数据分布探查,获取所述历史行驶信息中不同道路类型在每种天气类型以及行驶规则信息条件下与所述加速度范围的相对周期性规律,并基于所述相对周期性规律确定时间周期长度;
27、基于所述时间周期长度对所述行驶维度矩阵数据进行有监督时间序列数据整理,得到行驶预测矩阵数据;
28、基于所述行驶预测矩阵数据对所述预设未来时间段内的所述加速度范围的变化趋势进行预测,生成第二行驶矩阵数据。
29、本技术在一较佳示例中可以进一步配置为:所述对所述第二行驶矩阵数据中所包含的数据进行数据处理,得到行驶数据,包括:
30、计算所述第二行驶矩阵数据中所包含数据的正态分布均值以及正态分布方差,并基于所述正态分布均值以及所述正态分布方差确定所述第二行驶矩阵数据的3σ范围;
31、判断所述第二行驶矩阵数据中所包含的数据是否在所述3σ范围之外,若所述数据在所述3σ范围之外,则确定所述数据所在所述第二行驶矩阵数据的第一矩阵序列;
32、根据所述第一矩阵序列计算序列平均值,用所述序列平均值对所述数据进行替换,得到替换后的第二矩阵序列;
33、对所述第二矩阵序列进行缺失值以及归一化处理,得到行驶数据。
34、本技术在一较佳示例中可以进一步配置为:所述根据计算得到的行驶速度差值以及所述车辆行驶信息生成控制指令,控制调整所述车辆的行驶速度,还包括:
35、获取车辆图像信息,所述车辆图像信息用于表示位于所述车辆后方的车辆图像信息;
36、对所述车辆图像信息进行分析,确定所述车辆的后方是否存在其他车辆;
37、若不存在所述其他车辆,则根据所述控制指令控制调整所述车辆的行驶速度;
38、若存在所述其他车辆,则根据所述车辆位置信息以及所述其他车辆对应的车辆位置信息确定所述车辆与所述其他车辆之间的距离信息,并对所述车辆图像信息进行车辆分析,预测所述车辆当前的速度信息,结合所述速度信息、所述控制指令中对应的调整速度以及所述距离信息进行计算,生成车辆追尾事故发生的概率信息。
39、第二方面,本技术提供一种车速控制的控制装置,采用如下的技术方案:
40、一种车速控制的控制装置,包括,
41、信息获取模块,用于获取车辆位置信息以及车辆行驶信息,所述车辆位置信息用于表示当前车辆在行驶状态下的位置信息;
42、信息确认模块,用于根据所述车辆位置信息确定所述车辆所行驶道路的道路信息;
43、异常判断模块,用于调取所述道路信息中行驶规则信息,并基于所述行驶规则信息判断所述车辆行驶信息是否存在预设异常;
44、指令控制模块,用于若所述车辆行驶信息存在所述预设异常,则对所述车辆行驶信息中的行驶速度以及所述行驶规则信息中的行驶速度进行差值计算,并根据计算得到的行驶速度差值以及所述车辆行驶信息生成控制指令,控制调整所述车辆的行驶速度。
45、在一种可能的实现方式中,所述装置还包括:图像获取模块、确定模块、信息分析模块以及计算模块,其中,
46、所述图像获取模块,用于获取当前图像信息,所述当前图像信息用于表示所述道路信息的遥感图像信息;
47、所述确定模块,用于基于所述车辆行驶信息确定当前加速度;
48、所述信息分析模块,用于对所述车辆行驶信息、所述行驶规则信息以及所述当前图像信息进行分析,得到标准加速度范围;
49、所述计算模块,用于判断所述当前加速度在未来预设时间段内是否符合所述标准加速度范围,若不符合,则计算所述当前加速度与所述标准加速度范围中与所述当前加速度相近加速度之间的加速度差值,并根据所述加速度差值生成调整指令,控制所述当前加速度符合所述标准加速度范围值。
50、在另一种可能的实现方式中,所述信息分析模块在对所述车辆行驶信息、所述行驶规则信息以及所述遥感图像信息进行分析,得到标准加速度范围时,具体用于:
51、获取历史行驶信息以及当前环境信息,所述历史行驶信息用于表示所述车辆在预设历史时间段内不同环境天气下按照所述行驶规则信息中最高行驶速度以及最低行驶速度行驶在不同道路类型所对应的行驶信息,所述当前环境信息用于表示当前所述车辆所处的环境天气信息;
52、基于所述当前图像信息进行三维道路模拟,得到三维道路模型;
53、将所述车辆行驶信息、所述行驶规则信息以及所述当前环境信息分别与所述三维道路模型进行融和更新,得到实时道路模型;
54、根据所述实时道路模型确定所述车辆在预设未来时间段内的行驶道路信息;
55、根据所述历史行驶信息以及所述行驶道路信息对所述车辆的行驶加速度进行分析,得到所述预设未来时间段内所述车辆的标准加速度范围。
56、在另一种可能的实现方式中,所述计算模块在根据所述历史行驶信息以及所述行驶道路信息对所述车辆的行驶加速度进行分析,得到所述预设未来时间段内所述车辆的标准加速度范围时,具体用于:
57、对所述历史行驶信息进行分析,确定所述历史行驶信息中不同天气类型以及不同道路类型在每种天气类型以及所述行驶规则信息的基础上对应的加速度范围,并基于所述天气类型以及所述加速度范围对所述历史行驶信息进行无监督时间序列数据整理,得到第一行驶矩阵数据;
58、将所述第一行驶矩阵数据输入至训练好的向量模型进行向量特征提取,得到行驶特征维度数量,并将得到的所述行驶特征维度数量与所述第一行驶矩阵数据进行数据结合处理,生成第二行驶矩阵数据;
59、对所述第二行驶矩阵数据中所包含的数据进行数据处理,得到行驶数据,并将得到的所述行驶数据输入至预设算法模型中进行数据推算,生成每种天气类型对应的不同道路类型在所述预设未来时间段内的加速度范围;
60、将所述行驶道路信息中的道路信息以及未来天气信息分别与不同所述道路类型以及所述天气类型进行匹配,得到所述预设未来时间段内所述车辆的标准加速度范围。
61、在另一种可能的实现方式中,所述计算模块在将得到的所述行驶特征维度数量与所述第一行驶矩阵数据进行数据结合处理,生成第二行驶矩阵数据时,具体用于:
62、将所述行驶特征维度数量与所述第一行驶矩阵数据进行整合,生成行驶维度矩阵数据;
63、对所述行驶维度矩阵数据进行基本数据分布探查,获取所述历史行驶信息中不同道路类型在每种天气类型以及行驶规则信息条件下与所述加速度范围的相对周期性规律,并基于所述相对周期性规律确定时间周期长度;
64、基于所述时间周期长度对所述行驶维度矩阵数据进行有监督时间序列数据整理,得到行驶预测矩阵数据;
65、基于所述行驶预测矩阵数据对所述预设未来时间段内的所述加速度范围的变化趋势进行预测,生成第二行驶矩阵数据。
66、在另一种可能的实现方式中,所述计算模块在对所述第二行驶矩阵数据中所包含的数据进行数据处理,得到行驶数据时,具体用于:
67、计算所述第二行驶矩阵数据中所包含数据的正态分布均值以及正态分布方差,并基于所述正态分布均值以及所述正态分布方差确定所述第二行驶矩阵数据的3σ范围;
68、判断所述第二行驶矩阵数据中所包含的数据是否在所述3σ范围之外,若所述数据在所述3σ范围之外,则确定所述数据所在所述第二行驶矩阵数据的第一矩阵序列;
69、根据所述第一矩阵序列计算序列平均值,用所述序列平均值对所述数据进行替换,得到替换后的第二矩阵序列;
70、对所述第二矩阵序列进行缺失值以及归一化处理,得到行驶数据。
71、在另一种可能的实现方式中,所述装置还包括:车辆获取模块、车辆分析模块、车辆控制模块以及事故预测模块,其中,
72、所述车辆获取模块,用于获取车辆图像信息,所述车辆图像信息用于表示位于所述车辆后方的车辆图像信息;
73、所述车辆分析模块,用于对所述车辆图像信息进行分析,确定所述车辆的后方是否存在其他车辆;
74、所述车辆控制模块,用于当不存在所述其他车辆时,根据所述控制指令控制调整所述车辆的行驶速度;
75、所述事故预测模块,用于当存在所述其他车辆时,根据所述车辆位置信息以及所述其他车辆对应的车辆位置信息确定所述车辆与所述其他车辆之间的距离信息,并对所述车辆图像信息进行车辆分析,预测所述车辆当前的速度信息,结合所述速度信息、所述控制指令中对应的调整速度以及所述距离信息进行计算,生成车辆追尾事故发生的概率信息。
76、第三方面,本技术提供一种车速控制器,采用如下的技术方案:
77、至少一个处理器;
78、存储器;
79、至少一个应用程序,其中至少一个应用程序被存储在存储器中并被配置为由至少一个处理器执行,所述至少一个应用程序配置用于:执行上述的一种车速控制的控制方法。
80、第四方面,本技术提供一种计算机可读存储介质,采用如下的技术方案:
81、一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令所述计算机执行上所述的一种车速控制的控制方法。
82、综上所述,本技术包括以下至少一种有益技术效果:
83、当车辆在道路上行驶时,获取车辆位置信息以及车辆行驶信息,根据车辆位置信息确定车辆所行驶道路的道路信息,然后调取道路信息中行驶规则信息,并基于行驶规则信息判断车辆行驶信息是否存在预设异常,若车辆行驶信息存在预设异常,则对车辆行驶信息中的行驶速度以及行驶规则信息中的行驶速度进行差值计算,并根据计算得到的行驶速度差值以及车辆行驶信息生成控制指令,控制调整车辆的行驶速度,从而在车辆的行驶速度超过道路对应的行驶规则信息中的规定速度时,强制降低车速至规定速度,以避免因超速导致的事故发生。
- 还没有人留言评论。精彩留言会获得点赞!