一种电动汽车齿轮贴合的扭矩控制系统及其控制方法与流程
本发明涉及汽车齿轮贴合扭矩控制的领域,具体是一种电动汽车齿轮贴合的扭矩控制系统及其控制方法。
背景技术:
1、由于新能源汽车较传统汽车具有更强的起步性能和行驶加速性,为了提升新能源车能量利用率,车辆会在正扭矩驱动和负扭矩驱动状态频繁切换,而因传动系统中存在齿轮间隙导致车辆在起步时和行驶加速时会产生齿轮的碰撞声,从而大大降低了车辆驾驶的舒适性和影响用户对车辆高品质的要求。
2、如中国专利号为201910568682.9的一种纯电动汽车起步防抖动控制方法,所述方法更多的是解决电动车在车辆起步时防抖动控制并且防抖动控制周期长,会影响车辆的加速性能和需针对不同类型车辆重复标定数据,增加了产品开发周期。
技术实现思路
1、为了解决上述问题,本发明提出一种电动汽车齿轮贴合的扭矩控制系统及其控制方法。
2、一种电动汽车齿轮贴合的扭矩控制系统,包括:
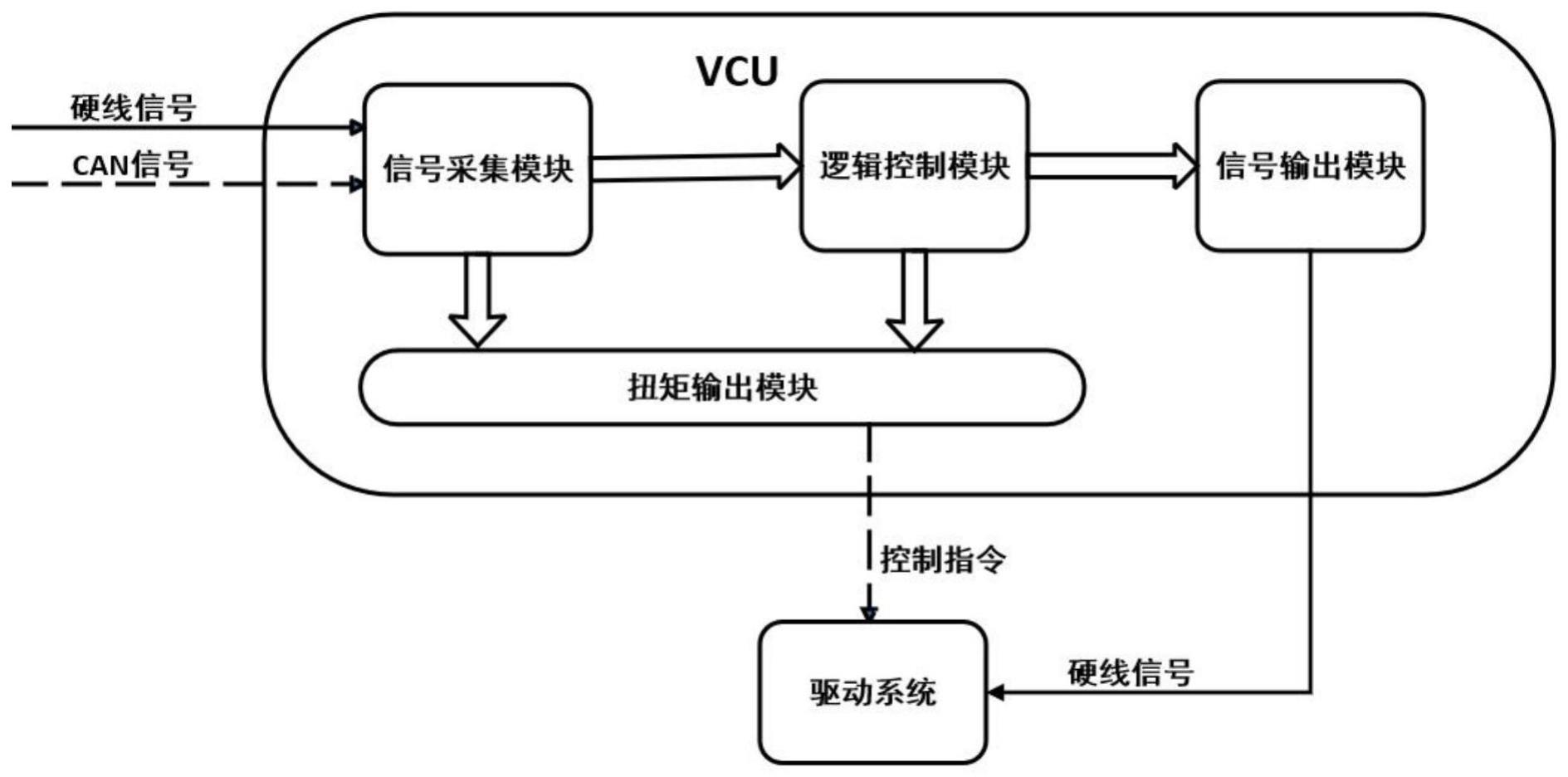
3、整车控制器vcu,用于完成整车can网络信号的采集,包括整车bms系统信号、mcu系统信号、obc系统信号以及加速踏板、制动踏板、档位类硬线输入信号的采集;
4、驱动系统,实时根据整车控制器vcu的控制指令来执行不同的动作响应。
5、所述的整车控制器vcu包括设置在内部的信号采集模块、通过信号采集模块将信号进行系统转化后统一传递的逻辑控制模块、通过逻辑控制模块进行逻辑运算后再次传递参数的扭矩输出模块、通过扭矩输出模块综合计算出电机所需的驱动扭矩指令的信号输出模块。
6、所述的信号输出模块通过can总线指令和硬线信号并行控制驱动系统。
7、所述的驱动系统包括电机控制器mcu、电机、差速器。
8、所述的控制指令包括工作模式、请求扭矩、使能信号。
9、一种电动汽车齿轮贴合的扭矩控制系统的控制方法,其具体步骤如下:
10、s11、是否满足可行车的状态:整车控制器vcu根据车辆的状态判断整车是否满足ready条件,是否满足了可行车的状态;
11、s12、是否处于静止:整车控制器vcu判断车辆是否处于静止状态;
12、s13、是否制动:整车控制器vcu通过硬线接口判断车辆是否踩下制动踏板:
13、s14、定时器清零:制动踏板未踩下时整车控制器停止t1的计时并把定时器清零,发送驱动请求扭矩0给驱动系统;
14、s15、判断档位:当制动踏板踩下并判断车辆的档位状态,判断车辆是否处于有效的档位状态;
15、s16:当制动踏板处于踩下状态,根据车辆状态发送指令;
16、s17、整车控制器判断车辆是否工作在蠕行模式;
17、s18、判断驾驶意图:整车控制器通过制动踏板状态、加速踏板状态、档位状态类判断驾驶员是否有驾驶意图;
18、s19、判断扭矩:整车控制器vcu通过驱动系统上报的can信号并通过算法判定驱动系统是否在相邻的2个时刻出现了负扭矩到正扭矩的变化;
19、s110、执行动态靠齿策略:整车控制器通过判断驱动系统在加速行驶时由负扭矩到正扭矩变化时,会执行动态靠齿策略;
20、s111、判断时间:整车控制器判断定时器t2时间是否累计到100ms,时间到后结束动态靠齿策略;
21、s21、信号判定一:整车控制器通过can网络信号、硬线信号、驾驶员的驾驶意图类综合判定使车辆进入蠕行行驶模式,按照蠕行控制策略发送蠕行扭矩给驱动系统,使车辆在无需踩加速踏板时按照固定的车速稳速行驶;
22、s31、信号判定二:整车控制器通过can网络信号、硬线信号、驾驶员的驾驶意图类综合判定使车辆进入驱动行驶模式,整车控制器实时判定驾驶员意图发送驱动请求扭矩给驱动系统驱动的车辆行驶。
23、所述的步骤s16中,车辆状态以及指令如下:
24、如果车辆处于前进档时,整车控制器vcu会发送0.4nm的靠齿扭矩给驱动系统,发送周期t1为1s时间;
25、如果车辆处于后退档时,整车控制器vcu会发送-0.4nm的靠齿扭矩给驱动系统,发送周期t1为1s时间;
26、为增加车辆的实时响应,计时周期t1会时刻被松开制动踏板动作中断直接进入驱动模式。
27、所述的步骤s110的具体实施如下:动态靠齿扭矩总执行周期t2为100ms,在t2周期内按照定周期t3为10ms和定步长s为1nm,整车控制器按照每t3周期增加单定步长s,并按照t3周期发送给驱动系统,当靠齿扭矩累加到5nm后保持3.5nm的靠齿扭矩发送给驱动系统。
28、本发明的有益效果是:本发明有效解决因电动车驱动系统齿轮间隙大而导致的车辆起步、加速行驶、车辆由发电模式进入驱动模式时驱动系统齿轮贴合而产生碰撞声的问题,降低了电机驱动扭矩的抖动频率和抖幅,提高了车辆品质和驾驶舒适性,克服了因驱动系统齿轮间隙生产工艺不一致,公差大而导致整车装配合格率低等问题,通过增加整车控制器vcu实现了车辆在多种工况下的齿轮贴合的功能,降低了硬件开发成本。
技术特征:
1.一种电动汽车齿轮贴合的扭矩控制系统,其特征在于:包括:
2.根据权利要求1所述的一种电动汽车齿轮贴合的扭矩控制系统,其特征在于:所述的整车控制器vcu包括设置在内部的信号采集模块、通过信号采集模块将信号进行系统转化后统一传递的逻辑控制模块、通过逻辑控制模块进行逻辑运算后再次传递参数的扭矩输出模块、通过扭矩输出模块综合计算出电机所需的驱动扭矩指令的信号输出模块。
3.根据权利要求2所述的一种电动汽车齿轮贴合的扭矩控制系统,其特征在于:所述的信号输出模块通过can总线指令和硬线信号并行控制驱动系统。
4.根据权利要求1所述的一种电动汽车齿轮贴合的扭矩控制系统,其特征在于:所述的驱动系统包括电机控制器mcu、电机、差速器。
5.根据权利要求1所述的一种电动汽车齿轮贴合的扭矩控制系统,其特征在于:所述的控制指令包括工作模式、请求扭矩、使能信号。
6.利用权利要求1至5中任一项所述的一种电动汽车齿轮贴合的扭矩控制系统的控制方法,其特征在于:其具体步骤如下:
7.根据权利要求6所述的一种电动汽车齿轮贴合的扭矩控制系统的控制方法,其特征在于:所述的步骤s16中,车辆状态以及指令如下:
8.根据权利要求6所述的一种电动汽车齿轮贴合的扭矩控制系统的控制方法,其特征在于:所述的步骤s110的具体实施如下:动态靠齿扭矩总执行周期t2为100ms,在t2周期内按照定周期t3为10ms和定步长s为1nm,整车控制器按照每t3周期增加单定步长s,并按照t3周期发送给驱动系统,当靠齿扭矩累加到5nm后保持3.5nm的靠齿扭矩发送给驱动系统。
技术总结
本发明涉及汽车齿轮贴合扭矩控制的领域,具体是一种电动汽车齿轮贴合的扭矩控制系统及其控制方法,该系统包括:整车控制器VCU、驱动系统,控制方法的具体步骤如下;S11、是否满足可行车的状态;S12、是否处于静止;S13、是否制动;S14、定时器清零;S15、判断档位;S16;当制动踏板处于踩下状态,根据车辆状态发送指令;S17、整车控制器判断车辆是否工作在蠕行模式;S18、判断驾驶意图;S19、判断扭矩;S110、执行动态靠齿策略;S111、判断时间;S21、信号判定一;S31、信号判定二;通过增加整车控制器VCU实现了车辆在多种工况下的齿轮贴合的功能,降低了硬件开发成本。
技术研发人员:耿超,宋振营,陈跃辉,陈洁,李小林,赵玉柱
受保护的技术使用者:山东国金汽车制造有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!