基于车路协同的汽车临界失稳速度及制动距离获取方法与流程
本技术涉及车辆运行,特别是一种基于车路协同的汽车临界失稳速度及制动距离获取方法。
背景技术:
1、汽车在道路行驶的安全行驶速度和制动距离,与汽车(包括汽车轮距b、汽车重力g、汽车重心高度hg等)、道路(包括圆曲线半径r、道路纵向坡度i、道路横向坡度ih、横向摩阻系数纵向摩阻系数f、附着系数路面平整度等)、气象(包括雨、雪、冰、雾、风、光照、昼夜等)、人(包括机动车的驾驶行为、个体的习惯、偶然的动作等)以及其他因素(包括非机动车、行人、各种路侧干扰等)密切相关,安全行驶速度和制动距离是实时动态值。
2、但现有车辆行驶过程中,行驶速度及制动仍然靠驾驶员经验、感性判断,无法综合考虑汽车、道路、气象、人等因素的影响,驾驶人员无法实时获得不同路段该车辆的准确安全行驶速度数据及制动距离,并且道路的限制速度为固定值(一个限速值、或者两个限速值),也无法体现合理的安全行驶速度和制动距离。导致车辆行驶速度受驾驶人员驾驶经验、习惯、感性判断的影响较大,容易引发交通事故或道路的拥堵,降低道路通行能力;特别是在恶劣天气、交通环境复杂的情况下,导致交通事故频繁,甚至发生重大、特大交通事故(例如2020年11月24日上午,包茂高速西安至延安方向,因大雾及长下坡桥梁结冰,引起10多辆大货车相撞,烧毁车辆14辆;2022年12月28日早上,郑新黄河大桥北向南方向,因大雾引起多车连环相撞,涉及车辆200多辆),给人民的生命、财产安全带来极大的威胁。
3、根据相关统计分析显示,引发交通事故的因素中人的因素大约占80%~85%,其中的超速驾驶、疲劳驾驶、纵向间距过短违章驾驶等行为又占人多因素中的绝大多数。主要原因就是汽车的安全行驶速度和制动距离未综合考虑汽车、道路、气象、人等因素的影响。
4、现有辅助驾驶方法例如cn201811215812.2汽车辅助驾驶系统及汽车辅助驾驶方法,仅考虑汽车行驶时获取的车身周围环境图形这一参数,并未将行驶路段的气象、汽车自身性能数据同时考虑,无法为驾驶人员提供该路段该车辆可靠的安全驾驶速度,以辅助驾驶。
5、又如cn201911185761.8公开了一种汽车辅助驾驶的方法以及汽车辅助驾驶装置,该方法虽然可以反馈安全驾驶速度,但也仅考虑了路况这一单一数据,无法综合其他数据,输出安全驾驶速度仅适用于该路段,无法根据车辆自身情况调整安全行驶速度,影响安全驾驶速度的准确性。
技术实现思路
1、本技术针对上述技术问题提供了一种基于车路协同的汽车临界失稳速度及制动距离获取方法,可在驾驶过程中实时获取合理安全速度v0、临界失稳速度vc以及临界制动距离dc,为驾驶人员提供辅助信息提高驾驶安全性的同时提高道路的通行能力,提升运输效率,缓解道路拥堵,减少交通事故。
2、本技术提供了一种基于车路协同的汽车临界失稳速度及制动距离获取方法,包括以下步骤:
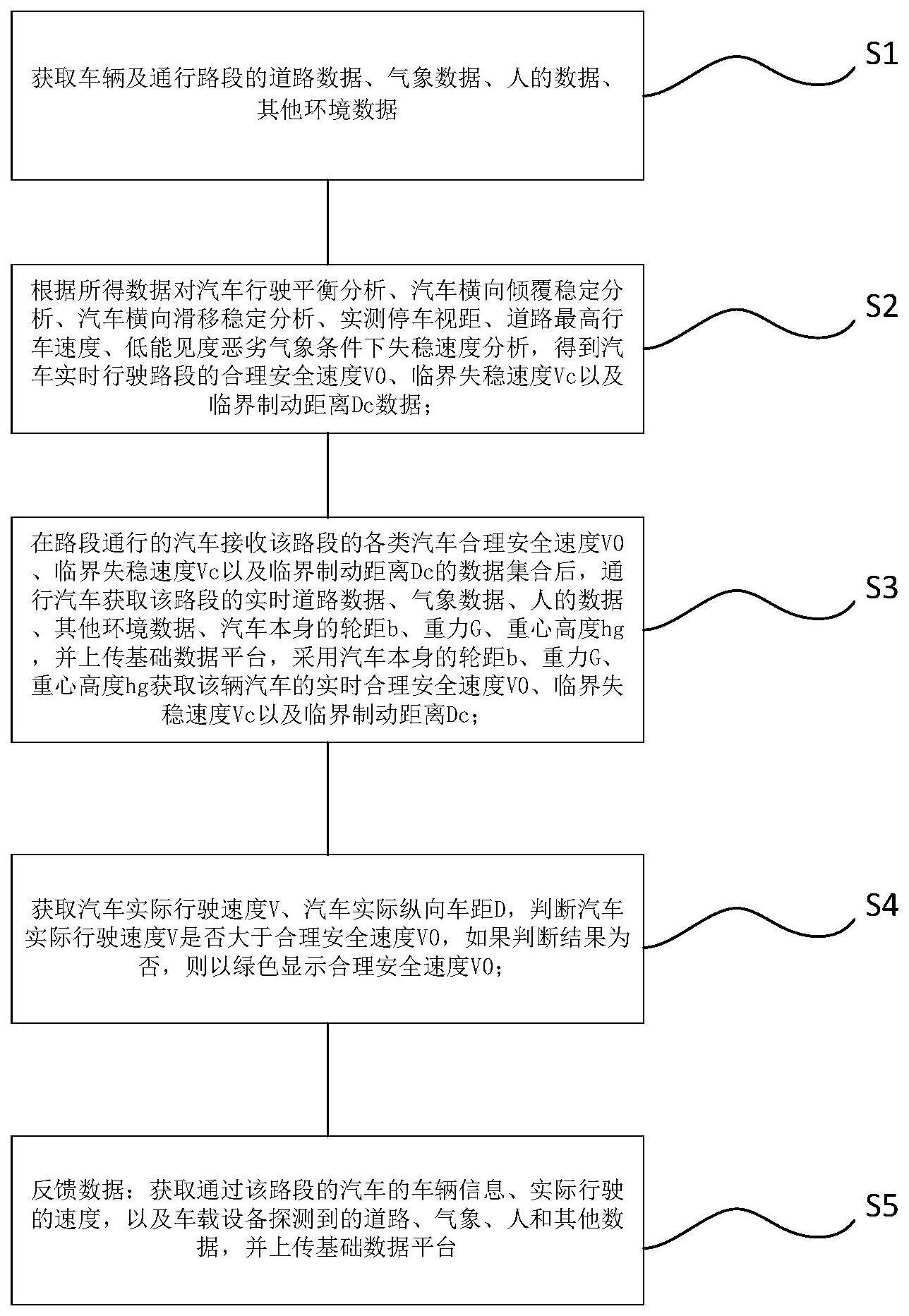
3、步骤s1:获取车辆及通行路段的道路数据、气象数据、人的数据、其他环境数据;
4、步骤s2:根据所得数据对汽车行驶平衡分析、汽车横向倾覆稳定分析、汽车横向滑移稳定分析、实测停车视距、道路最高行车速度、低能见度恶劣气象条件下失稳速度分析,得到汽车实时行驶路段的合理安全速度v0、临界失稳速度vc以及临界制动距离dc数据;
5、按下式获得临界失稳速度vc:
6、vc=min{vc-1,vc-2,vc-3,vc-4,vc-5} (式19)
7、其中,vc-1:汽车行驶时的平衡分析对应的临界失稳速度;vc-2:汽车横向倾覆稳定分析对应的临界失稳速度;vc-3:汽车横向滑移稳定分析对应的临界失稳速度;vc-4:停车视距分析对应的临界失稳速度;vc-5:低能见度等恶劣气象条件分析对应的临界失稳速度;
8、合理安全速度v0满足下式:
9、v0=min{v0-1,v0-2,0.8·vc}(式20)
10、其中,v0-1:汽车行驶时的平衡分析对应的合理安全速度;v0-2:道路直线路段的合理安全速度;0.8·vc:汽车的临界失稳速度考虑合理折减后的速度;
11、临界制动距离dc满足下式:
12、dc=min{dc-1,dc-2,dc-3} (式21)
13、其中dc-1:正常气象条件及行驶状态下,道路的实测停车视距;dc-2:雨、雪、雾等低能见度等恶劣气象条件下,为实际能见度;dc-3:在出现道路拥堵、交通事故、交通管制或其他无法正常通行的障碍区时,车载探测设备、交管部门发布、卫星通信定位等方式获;
14、缓和曲线路段:其合理安全速度v0、临界失稳速度vc的值,由前后路段的相应参数按长度线形渐变确定;
15、汽车行驶平衡分析包括以下步骤:
16、步骤s21:按下式计算汽车离心力为:
17、得到
18、其中,f:离心力(n);g:汽车重力(n);r:道路圆曲线半径(m);v:汽车行驶速度(km/h);
19、将离心力f与汽车重力g分解为平行于路面的横向力x和垂直于路面的竖向力y,则有:
20、x=fcosα-gsinα
21、y=fsinα+gcosα
22、其中,α根据道路坡度设定为0°~5.71°,sinα值在0~0.0995,cosα值在1~0.9950,因此近似取sinα≈tanα=ih,cosα≈1,其中ih为道路横向坡度;
23、x=f-g·ih
24、将(式2)代入上式中,
25、
26、得到表征汽车行驶的横向稳定程度的横向力系数μ:
27、
28、因此有
29、
30、其中,r:圆曲线半径(m);v:汽车行驶速度(km/h);ih:横向坡度(以小数表示);
31、横向力系数μ对驾乘人员和车辆稳定的影响如下:当μ<0.10时,转弯不感到有曲线的存在,很平稳;当μ=0.15时,转弯感到有曲线的存在,但尚平稳;当μ=0.20时,已感到有曲线的存在,并感到不平稳;当μ=0.35时,感到有曲线的存在,并感到不稳定;当μ>0.40时,转弯非常不稳定,有倾覆的危险;取μ=0.10时对应的车速为合理安全速度v0-1:
32、
33、此时车辆离心力f=x+g·ih=μ·g+g·ih=g·(μ+ih)<<g;
34、◆取μ=0.35时对应的车速为临界失稳速度vc-1:
35、
36、(式6)和(式7)中的r和ih(以小数表示)均为道路各路段实际的圆曲线半径r和横向坡度ih;
37、步骤s3:在路段通行的汽车接收该路段的各类汽车合理安全速度v0、临界失稳速度vc以及临界制动距离dc的数据集合后,通行汽车获取该路段的实时道路数据、气象数据、人的数据、其他环境数据、汽车本身的轮距b、重力g、重心高度hg,并上传基础数据平台,采用汽车本身的轮距b、重力g、重心高度hg获取该辆汽车的实时合理安全速度v0、临界失稳速度vc以及临界制动距离dc;
38、步骤s4:获取汽车实际行驶速度v、汽车实际纵向车距d,通过报警单元显示实际行驶速度v、合理安全速度v0,并判断汽车实际行驶速度v与合理安全速度v0的关系:
39、v<v0且d>dc,则在报警单元色标显示紫、蓝;则在实际驾驶操作中进行正常行驶并加速;
40、v=v0且d>dc,则在报警单元色标显示绿,则在实际驾驶操作中进行正常行驶;
41、v0<v<vc且d>dc,则在报警单元色标显示橙、红,则在实际驾驶操作中进行减速行驶;
42、v=v0且d=dc,则在报警单元色标报警进行红色闪烁,同时声音报警蜂鸣器或语音提示,并在实际驾驶操作中进行制动减速;
43、v≥v0且d≤dc,则在报警单元色标报警进行红色常亮声音报警;同时声音报警蜂鸣器或语音长鸣,并在实际驾驶操作中紧急制动减速;
44、步骤s5:获取通过该路段的汽车的车辆信息、实际行驶的速度,以及车载设备探测到的道路、气象、人和其他数据,并上传后方管控和调度平台。
45、优选地,步骤s2中汽车横向倾覆稳定分析包括以下步骤:
46、步骤s22:根据汽车的横向倾覆条件为倾覆力矩不得大于稳定力矩,即:
47、
48、
49、
50、由于f·ih比g小很多,可忽略不计,则有:
51、
52、将(式7)代入(式3),则有
53、
54、其中,b:汽车轮距(m);hg:汽车重心高度(m);ih:道路横向坡度(以小数表示);
55、由(式9)得出临界失稳速度vc-2:
56、
57、(式10)中的r和ih(以小数表示)均为道路各路段实际的圆曲线半径r(设计阶段或测量获取,较为稳定)和横向坡度ih(运营期会发生变化,以定期实测为准);汽车轮距b、汽车重心高度hg根据不同车辆确定。
58、优选地,步骤s2中汽车横向滑移稳定分析包括以下步骤:
59、步骤s23:汽车的横向滑移条件为横向力不大于轮胎和路面之间的横向摩阻力,即:
60、
61、
62、f sinα+gcosα≈g
63、
64、
65、将(式4)代入(式10),则有
66、
67、
68、其中,横向摩阻系数,取为路面与轮胎间的附着系数;
69、由(式11)得出临界失稳速度vc-3:
70、
71、(式12)中的r和ih(以小数表示)均为道路各路段实际的圆曲线半径r(设计阶段或测量获取,较为稳定)和横向坡度ih(运营期会发生变化,以定期实测为准);受路面材料类型、使用年限、车速、雨、雪、冰等因素的影响较大,应根据路面材料类型、表面特征、使用年限进行测定,并依据车速及气象条件、道路雨、雪、冰等实时获取;路面状态附着系数干燥水泥路面为0.7~1.0、潮湿水泥路面为0.4~0.6、下雨开始时0.3~0.4,在新雪、接近冰的压实雪路面为:0.1~0.2,在平坦的冰的冰面为:0.05~0.1,路面状态附着系数值,根据实时气象条件下的路面状态由实测值确定;
72、汽车的横向滑移条件为横向力不大于轮胎和路面之间的横向摩阻力,即:
73、
74、
75、f sinα+gcosα≈g
76、
77、
78、将(式4)代入(式10),则有
79、
80、
81、横向摩阻系数,取为路面与轮胎间的附着系数(以小数表示);
82、由(式11)得出临界失稳速度vc-3:
83、
84、(式12)中的r和ih(以小数表示)均为道路各路段实际的圆曲线半径r和横向坡度ih;受路面材料类型、使用年限、车速、雨、雪、冰等因素的影响较大,应根据路面材料类型、表面特征、使用年限进行测定,并依据车速及气象条件、道路雨、雪、冰等实时获取;路面状态附着系数干燥水泥路面为0.7~1.0、潮湿水泥路面为0.4~0.6、下雨开始时0.3~0.4,在新雪、接近冰的压实雪路面为:0.1~0.2,在平坦的冰的冰面为:0.05~0.1;具体的路面状态附着系数值,根据实时气象条件下的路面状态由实测值确定。
85、优选地,步骤s2中实测停车视距包括以下步骤:
86、步骤s24:停车视距是当驾驶员发现前方有障碍物、危险或其他应该停车的情况下,经判断、采取制动直至停车的过程中汽车所行驶的距离;
87、在汽车从制动到停止的过程中,汽车行驶过的制动距离s为:
88、
89、式中:s:制动距离(m);v1:制动初始速度(km/h);路面与轮胎间的附着系数(以小数表示);ψ=f+i:道路阻力系数;f:滚动阻力系数;i:道路纵坡,上坡为正、下坡为负;
90、采取制动直至停车的过程中汽车所行驶的距离计算公式为:
91、
92、其中,t为发现前方障碍物、危险等后,识别、判断、制动反应的总时间,时间取1.5s,制动反应的时间取1.0s,识别、判断、制动反应的总时间t取2.5s;
93、在所得制动距离s上增加5~10m的安全距离;
94、由(式14)得出临界失稳速度vc-4:
95、
96、(式15)中s实测为道路的实测停车视距(m),受道路平面、纵面、路侧建构筑物、绿化等因素影响较大;为路面与轮胎间的附着系数,应根据路面材料类型、表面特征、使用年限进行测定,并依据车速及气象条件、道路雨、雪、冰等实时获取;f为滚动阻力系数,与路面类型、轮胎结构和行驶速度等有关,由试验确定。i为道路纵坡,上坡为正、下坡为负,根据道路纵面参数或实测确定;由(式15)解出vc-4即为道路实际视距所允许的临界失稳速度vc-4。
97、优选地,步骤s2中低能见度等恶劣气象条件包括以下步骤:
98、步骤s25:在低能见度恶劣气象条件下,设定汽车停车视距能见度s见:
99、由(式14)得出临界失稳速度vc-5:
100、
101、其中,s见为低能见度下的道路停车视距(m),按实际能见度控制,由气象端口获取;f、i与(式15)中相同;
102、由(式16)解出vc-5即为低能见度下所允许的临界失稳速度vc-5。
103、优选地,步骤s2中制动距离分析包括以下步骤:
104、步骤s26:由(式14)得出汽车实时速度v对应的实际制动距离d实:
105、
106、其中,v为汽车实际行驶速度(km/h),为汽车的实时车速。为路面与轮胎间的附着系数,应根据路面材料类型、表面特征、使用年限进行测定,并依据车速及气象调节实时获取;f为滚动阻力系数;i为道路纵坡,上坡为正、下坡为负;
107、由(式17)计算出d实即为汽车实时行驶速度下对应的实际制动距离d实;
108、实际制动距d实离应该小于临界制动距离dc;
109、临界制动距离dc-1:正常气象条件及行驶状态下,临界制动距离dc-1由道路的实测停车视距中s实测(m)控制,即dc-1=s实测;s实测为道路的实测停车视距(m);
110、临界制动距离dc-2:在低能见度等恶劣气象条件下,临界制动距离dc-2由实际能见度s见控制,即dc-2=s见。s见为低能见度下的道路停车视距(m);
111、临界制动距离dc-3:在出现道路拥堵、交通事故、交通管制或其他无法正常通行的障碍区时,临界制动距离dc-3由行驶车辆与前方障碍区距离s障决定;dc-3由车载探测设备、交管部门发布的信息、卫星通信定位等方式获取。
112、优选地,步骤s2中道路最高行车速度包括以下步骤:
113、步骤s27:根据每条道路还应结合道路的技术指标、周边的环境情况、车辆的机械性能、人员的生理特性、交通管理需求,综合确定道路的最高行车速度vmax;
114、该速度可按下列方法确定:
115、根据(式5),取μ=0.20时的速度作为某个曲线的最高行车速度vmax-n;
116、
117、将同一技术标准的道路路段沿线的各个曲线最高行车速度vmax-n取最小值,则得到同一技术标准的道路路段的最高行车速度vmax,即:
118、vmax=min{vmax-1,vmax-2,vmax-3,···vmax-n}
119、(式18)
120、n为同一技术标准的路段路段沿线的各个曲线的个数;取合理安全速度v0-2=vmax作为道路直线路段的合理安全速度。
121、优选地,道路数据包括:道路直线长度、缓和曲线参数、圆曲线半径r、纵向坡度i、道路横向坡度ih、横向摩阻系数φh、纵向摩阻系数f1、附着系数φ、路面平整度、道路是否为封闭道路;
122、更优选地,气象数据包括:实时天气、气象信息;
123、更优选地,人的数据包括:道路两侧的建筑信息;
124、更优选地,其他环境数据包括:道路两侧的行人、非机动车图像数据。
125、优选地,车辆数据包括:轮距b、重力g、重心高度hg、客车的重力g、客车的重心高度hg、货车的重力g、货车的重心高度hg。
126、优选地,货车的重力g、重心高度hg按下式计算:
127、g=g车+g货
128、
129、本技术的另一方面还提供了一种如上述的方法用基于车路协同的汽车临界失稳速度及制动距离获取装置,包括:
130、基础数据平台,用于通过沿途基站、通讯卫星、数据库获取基础数据:
131、接收、探测分析单元,用于根据所得数据进行以下分析得到汽车实时行驶路段的合理安全速度v0、临界失稳速度vc以及临界制动距离dc数据,并获取汽车实际行驶速度v、汽车实际纵向车距d,通过报警单元显示实际行驶速度v、合理安全速度v0,并判断汽车实际行驶速度v与合理安全速度v0的关系:
132、显示、提示报警单元,用于根据接收、探测分析单元的判断结果进行报警;
133、实际驾驶操作,用于根据接收、探测分析单元的判断结果对实际驾驶进行控制;
134、回传单元、后方管控调度平台,用于获取各项基础数据信息并上传。
135、本技术中所用参数定义:
136、合理安全速度v0:汽车在道路上行驶时,在综合了汽车、道路、气象、人及周围各种其他环境数据影响,并且考虑驾乘人员的感受,同时又能满足快捷、高效要求的情况下,汽车能保持安全、平稳运行的建议速度值。
137、临界失稳速度vc:汽车在道路上行驶时,综合考虑汽车、道路、气象、人及周围各种其他环境数据,并考虑一定的安全度后,汽车保持不侧翻、不滑移、不倾覆等交通事故的最大速度。
138、汽车实际纵向车距d:汽车行驶过程中与前车的实时相对间距。
139、临界制动距离dc:汽车行驶过程中,综合考虑汽车、道路、气象、车速、安全、人及其他环境数据,汽车为避免与前车或其他障碍物发生追尾、碰撞等交通事故而不得不采取紧急制动的最小相对距离。
140、为了使不同车辆在不同载重、不同道路、不同气象等条件下以最合理的安全速度v0行驶,从而达到安全、高效的目的,有必要采用基于车路协同的汽车运行管理方法。
141、本技术能产生的有益效果包括:
142、1)本技术所提供的基于车路协同的汽车临界失稳速度及制动距离获取方法,可实时获取车辆在该路段的实际行驶速度v、合理安全速度v0等,根据实际行驶速度v与合理安全速度v0、临界失稳速度vc的关系、汽车实际纵向车距d与临界制动距离dc的关系,对驾驶人员予以声光显示、提示、报警,在安全的前提下提高道路通行能力,提升运输效率,缓解道路拥堵,减少交通事故。
143、2)本技术所提供的基于车路协同的汽车临界失稳速度及制动距离获取方法,实时向驾驶人员反馈合理安全速度v0,供驾驶人员参考,减轻驾驶人员现场判断工作强度,减少人为判断失误率。
- 还没有人留言评论。精彩留言会获得点赞!