车辆的转弯半径确定方法、装置、系统、设备及介质与流程
本发明实施例涉及自动驾驶,尤其涉及一种车辆的转弯半径确定方法、装置、系统、设备及介质。
背景技术:
1、随着社会的进步和汽车技术的发展,特别是自动驾驶技术的应用推广,车辆转弯半径是自动驾驶系统路径规划和运动控制必不可少的重要参数,对不同工况与状态下车辆的转弯半径进行准确测量,有利于提升自动驾驶车辆的控制品质。
2、现有技术中,通常采用人工绘制轨迹线,测量车辆的转弯半径。但是,上述方案,存在准确度较低,人工成本较高的情况。
技术实现思路
1、本发明提供一种车辆的转弯半径确定方法、装置、系统、设备及介质,以实现自动化确定车辆的转弯半径,提高确定的车辆的转弯半径的准确度,降低人工成本。
2、根据本发明的一方面提供了一种车辆的转弯半径的确定方法,包括:
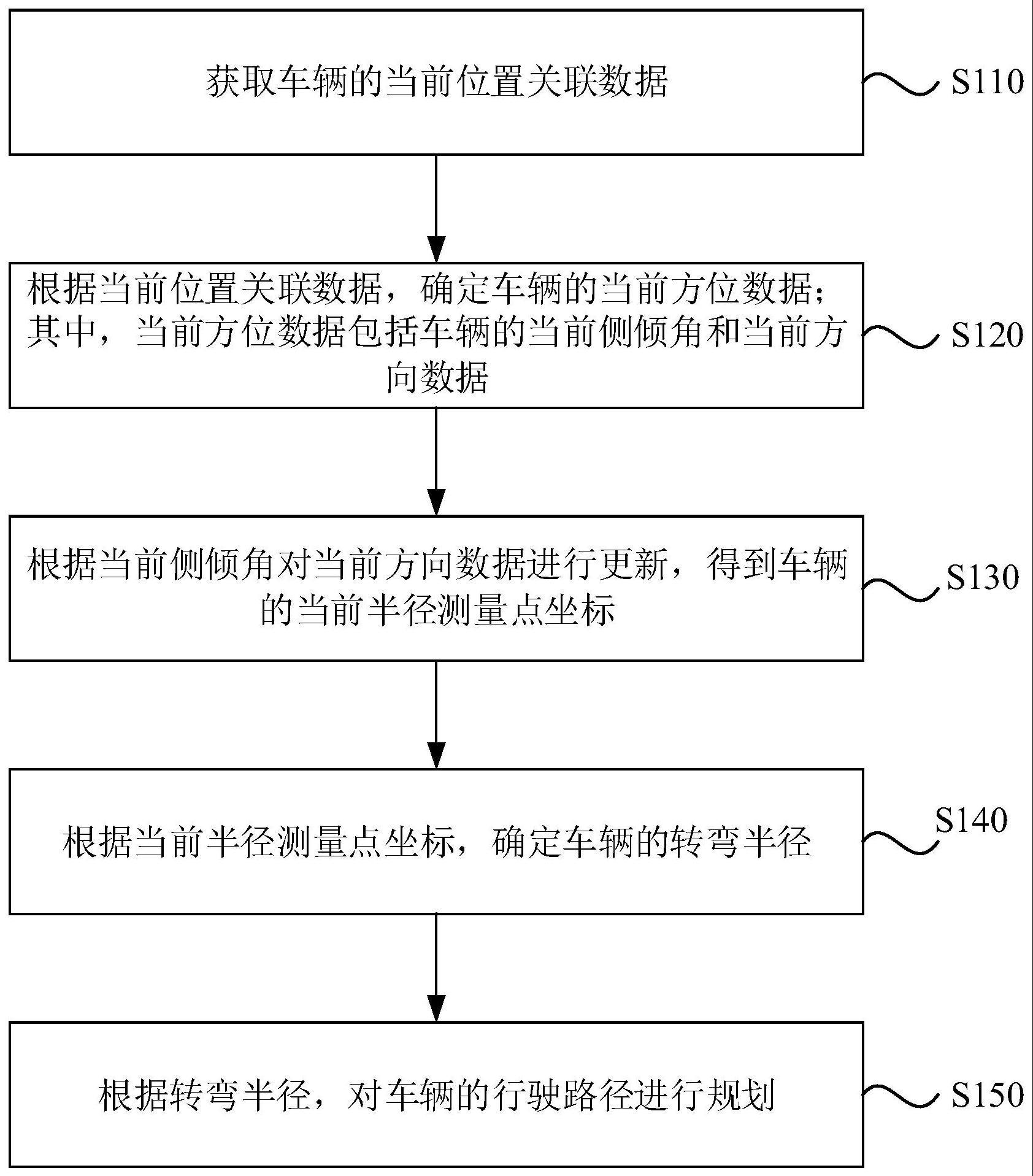
3、获取车辆的当前位置关联数据;
4、根据所述当前位置关联数据,确定所述车辆的当前方位数据;其中,所述当前方位数据包括所述车辆的当前侧倾角和当前方向数据;
5、根据所述当前侧倾角对所述当前方向数据进行更新,得到所述车辆的当前半径测量点坐标;
6、根据所述当前半径测量点坐标,确定所述车辆的转弯半径;
7、根据所述转弯半径,对所述车辆的行驶路径进行规划。
8、根据本发明的另一方面提供了一种车辆的转弯半径的确定装置,包括:
9、关联数据获取模块,用于获取车辆的当前位置关联数据;
10、当前方位数据确定模块,用于根据所述当前位置关联数据,确定所述车辆的当前方位数据;其中,所述当前方位数据包括所述车辆的当前侧倾角和当前方向数据;
11、测量点坐标确定模块,用于根据所述当前侧倾角对所述当前方向数据进行更新,得到所述车辆的当前半径测量点坐标;
12、转弯半径确定模块,用于根据所述当前半径测量点坐标,确定所述车辆的转弯半径;
13、路径规划模块,用于根据所述转弯半径,对所述车辆的行驶路径进行规划。
14、根据本发明的另一方面,提供了一种车辆的转弯半径的确定系统,包括:融合定位装置和转弯半径确定装置,其中,
15、所述融合定位装置与所述转弯半径确定装置通信连接,用于获取车辆的当前位置关联数据,并根据所述当前位置关联数据,确定所述车辆的当前方位数据;
16、所述转弯半径确定装置用于根据所述当前方位数据,确定所述车辆的当前半径测量点坐标,并根据所述当前半径测量点坐标,确定所述车辆的转弯半径。
17、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
18、至少一个处理器;以及
19、与所述至少一个处理器通信连接的存储器;其中,
20、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的车辆的转弯半径的确定方法。
21、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的车辆的转弯半径的确定方法。
22、根据本发明的一方面提供了一种车辆的转弯半径确定方案,通过获取车辆的当前位置关联数据;根据当前位置关联数据,确定车辆的当前方位数据;其中,当前方位数据包括车辆的当前侧倾角和当前方向数据;根据当前侧倾角对当前方向数据进行更新,得到车辆的当前半径测量点坐标;根据当前半径测量点坐标,确定车辆的转弯半径;根据转弯半径,对车辆的行驶路径进行规划。上述方案,实现了自动化确定车辆的转弯半径,降低了人工成本;同时,通过当前侧倾角对当前方向数据进行更新,得到车辆的当前半径测量点坐标,提高了确定的当前半径测量点坐标的准确度,进而提高了根据当前半径测量点坐标,确定车辆的转弯半径的准确度。
23、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种车辆的转弯半径确定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述当前半径测量点坐标,确定所述车辆的转弯半径,包括:
3.根据权利要求2所述的方法,其特征在于,所述对所述当前半径测量点坐标进行轨迹圆半径拟合,得到当前轨迹圆半径,包括:
4.根据权利要求2所述的方法,其特征在于,所述根据所述当前轨迹圆半径,确定所述车辆的转弯半径,包括:
5.根据权利要求1所述的方法,其特征在于,所述当前方向数据包括第一当前方向数据和第二当前方向数据,则所述根据所述当前侧倾角对所述当前方向数据进行更新,得到所述车辆的当前半径测量点坐标,包括:
6.根据权利要求1-5任一项所述的方法,其特征在于,在所述获取车辆的当前位置关联数据之前,所述方法还包括:
7.一种车辆的转弯半径确定装置,其特征在于,包括:
8.一种车辆的转弯半径确定系统,其特征在于,包括:融合定位装置和转弯半径确定装置,其中,
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-6任一项所述的一种车辆的转弯半径确定方法。
技术总结
本发明实施例公开了一种车辆的转弯半径确定方法、装置、系统、设备及介质,该方法包括:获取车辆的当前位置关联数据;根据所述当前位置关联数据,确定所述车辆的当前方位数据;其中,所述当前方位数据包括所述车辆的当前侧倾角和当前方向数据;根据所述当前侧倾角对所述当前方向数据进行更新,得到所述车辆的当前半径测量点坐标;根据所述当前半径测量点坐标,确定所述车辆的转弯半径;根据所述转弯半径,对所述车辆的行驶路径进行规划。上述方案,实现了自动化确定车辆的转弯半径,降低了人工成本;同时,提高了确定的当前半径测量点坐标的准确度,进而提高了根据当前半径测量点坐标,确定车辆的转弯半径的准确度。
技术研发人员:崔振,高健,赖兵,徐伟,秦伟,徐文静,路遥,杨刘根,王鹏
受保护的技术使用者:九识(苏州)智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!