全速自适应巡航的状态机迁移控制方法、系统及车辆与流程
本发明涉及自适应巡航,尤其涉及一种全速自适应巡航的状态机迁移控制方法、系统及车辆。
背景技术:
1、全速自适应巡航(fsra)是根据主车与前车间的相对距离、速度以及设定的巡航速度、跟车距离等信息,通过自动调节油门开度和制动压力,使当前车辆按照设定的速度自动行驶,当前车减速时,主车速度跟着降低,当前车停车时,主车跟随前车停车,始终使主车与前方车辆保持在一定的安全距离内;当前车由静止驶离后,主车在驾驶员踩油门、按恢复键或者一定时间内自动跟随前车起步。
2、全速自适应巡航(fsra)系统通常由5个控制模块构成,如图1所示,系统根据车辆状态、环境感知和驾驶员输入的信号,自动计算并输出车辆巡航控制所需要的扭矩力和制动力,从而实现车辆全速范围内的自适应巡航控制,其中环境感知信号主要是雷达或摄像头采集到的距离、车速等信号。
3、其中状态管理模块是根据车辆的当前状态(如静止、加速、定速巡航、跟车、油门、刹车、方向盘按键、故障等)进行控制状态迁移的设计,以满足车辆在自适应巡航控制模式和驾驶员控制模式间的平顺切换,目前现有的技术对此状态机的设计和迁移条件的组合设计比较粗犷,尤其是迁移条件的组合设计未全面考虑车辆及驾驶员的实际操作状态,由此可能影响车辆操控的可靠性和平顺性。
技术实现思路
1、本发明提供一种全速自适应巡航的状态机迁移控制方法、系统及车辆,用以解决现有技术中迁移条件的组合设计未全面考虑车辆及驾驶员的实际操作状态的缺陷,保证车辆操控的可靠性和平顺性。
2、本发明提供一种全速自适应巡航的状态机迁移控制方法,包括:
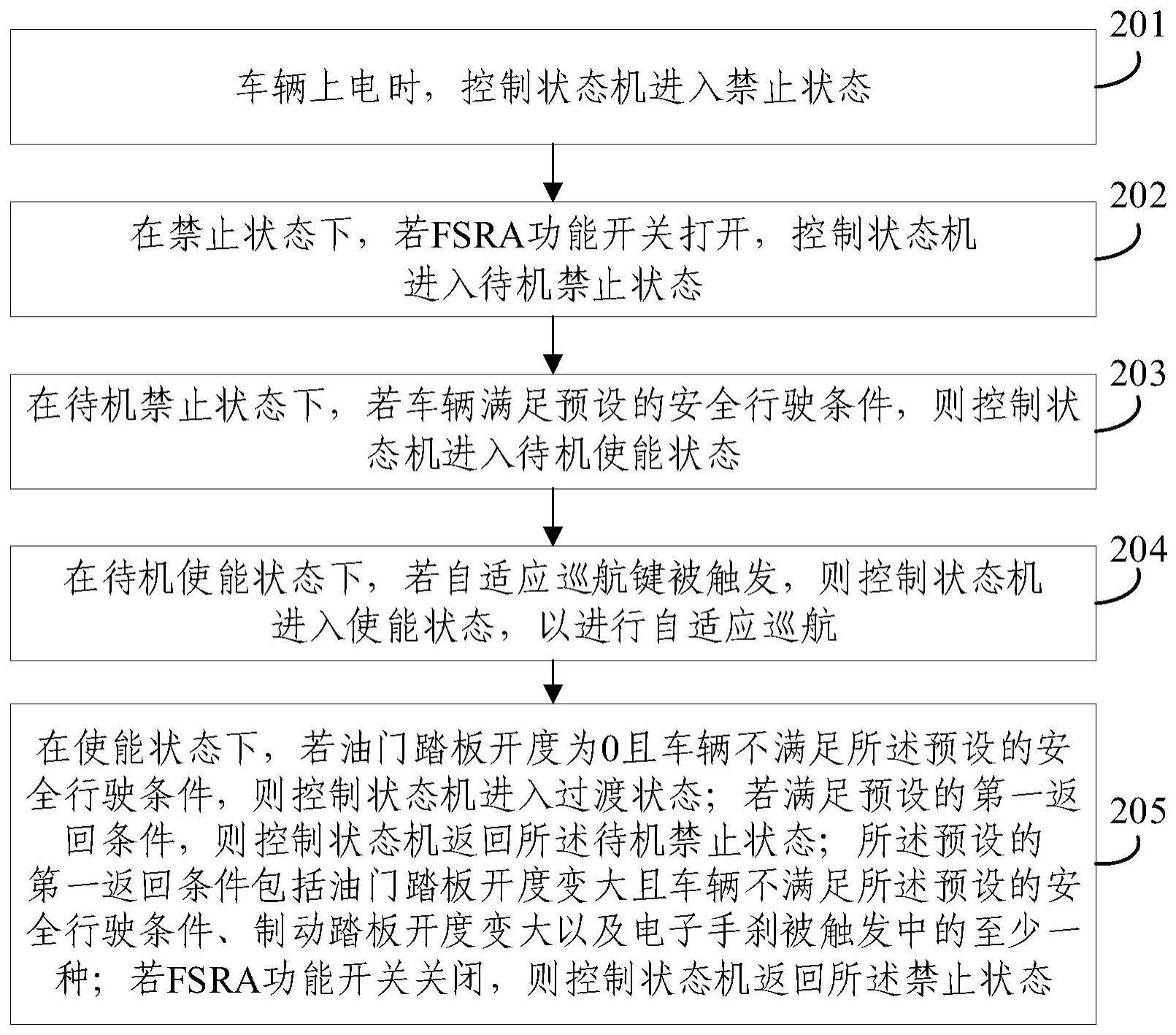
3、车辆上电时,控制状态机进入禁止状态;
4、在禁止状态下,若fsra功能开关打开,控制状态机进入待机禁止状态;
5、在待机禁止状态下,若车辆满足预设的安全行驶条件,则控制状态机进入待机使能状态;
6、在待机使能状态下,若自适应巡航键被触发,则控制状态机进入使能状态,以进行自适应巡航;
7、在使能状态下,若油门踏板开度为0且车辆不满足所述预设的安全行驶条件,则控制状态机进入过渡状态;若满足预设的第一返回条件,则控制状态机返回所述待机禁止状态;所述预设的第一返回条件包括油门踏板开度变大且车辆不满足所述预设的安全行驶条件、制动踏板开度变大以及电子手刹被触发中的至少一种;若fsra功能开关关闭,则控制状态机返回所述禁止状态。
8、可选地,若油门踏板开度为0且车辆不满足所述预设的安全行驶条件,则控制状态机进入过渡状态之后,还包括:
9、在过渡状态下,若满足预设的第二返回条件,则控制状态机返回所述待机禁止状态;所述预设的第二返回条件包括制动踏板开度变大、油门踏板开度变大、自适应巡航取消按键被触发以及车辆行驶时间超过第一设定时间中至少一项。
10、可选地,若油门踏板开度为0且车辆不满足所述预设的安全行驶条件,则控制状态机进入过渡状态之后,还包括:
11、在过渡状态下,若满足预设的第三返回条件,则控制状态机返回所述禁止状态;所述预设的第三返回条件包括fsra功能开关关闭和车辆静止时间超过第二设定时间中至少一个。
12、可选地,在待机使能状态下,还包括:
13、若fsra功能开关关闭,则控制状态机返回所述禁止状态。
14、可选地,在待机使能状态下,还包括:
15、若车辆不满足预设的安全行驶条件,则控制状态机返回所述待机禁止状态。
16、可选地,在待机禁止状态下,还包括:
17、若fsra功能开关关闭,则控制状态机返回所述禁止状态。
18、可选地,所述预设的安全行驶条件包括:
19、电子手刹未被触发;制动踏板开度为0;防抱死系统状态正常;档位开关处于前进挡;车门关闭;发动机启动;电子稳定系统状态正常;牵引力控制系统状态正常;自动刹车辅助系统未触发;前方碰撞预警系统未触发;刹车系统温度小于或等于温度阈值;加速度小于或等于加速度阈值;车速小于或等于巡航车速阈值。
20、本发明还提供一种自适应巡航的状态机迁移控制系统,包括:
21、禁止状态模块,用于车辆上电时,控制状态机进入禁止状态;
22、待机禁止状态模块,用于在禁止状态下,若fsra功能开关打开,控制状态机进入待机禁止状态;
23、待机使能状态模块,用于在待机禁止状态下,若车辆满足预设的安全行驶条件,控制状态机进入待机使能状态;
24、使能状态模块,用于在待机使能状态下,若自适应巡航键被触发,则控制状态机进入使能状态,以进行自适应巡航;
25、跳转模块,用于在使能状态下,若油门踏板开度为0且车辆不满足所述预设的安全行驶条件,则控制状态机进入过渡状态;若满足预设的第一返回条件,则控制状态机返回所述待机禁止状态;所述预设的第一返回条件包括油门踏板开度变大且车辆不满足所述预设的安全行驶条件、制动踏板开度变大以及电子手刹被触发中的至少一种;若fsra功能开关关闭,则控制状态机返回所述禁止状态。
26、本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现所述的全速自适应巡航的状态机迁移控制方法。
27、本发明还提供一种车辆,包括所述的自适应巡航的状态机迁移控制系统或者所述的电子设备。
28、本发明提供的全速自适应巡航的状态机迁移控制方法、系统及车辆,通过车辆上电时,控制状态机进入禁止状态;在禁止状态下,若fsra功能开关打开,控制状态机进入待机禁止状态;在待机禁止状态下,若车辆满足预设的安全行驶条件,则控制状态机进入待机使能状态;在待机使能状态下,若自适应巡航键被触发,则控制状态机进入使能状态,以进行自适应巡航;在使能状态下,若油门踏板开度为0且车辆不满足所述预设的安全行驶条件,则控制状态机进入过渡状态;若满足预设的第一返回条件,则控制状态机返回待机禁止状态;所述预设的第一返回条件包括油门踏板开度变大且车辆不满足所述预设的安全行驶条件、制动踏板开度变大以及电子手刹被触发中的至少一种;若fsra功能开关关闭,则控制状态机返回禁止状态。即本发明将状态机划分为5级状态,包括:禁止状态、待机禁止状态、待机使能状态、使能状态以及过渡状态,并根据车辆状态精细化状态机之间的迁移条件,使状态机和迁移条件的组合设计更接近实际驾驶场景,从而保证车辆驾驶的可靠性和平顺性。
技术特征:
1.一种全速自适应巡航的状态机迁移控制方法,其特征在于,包括:
2.根据权利要求1所述的全速自适应巡航的状态机迁移控制方法,其特征在于,若油门踏板开度为0且车辆不满足所述预设的安全行驶条件,则控制状态机进入过渡状态之后,还包括:
3.根据权利要求1所述的全速自适应巡航的状态机迁移控制方法,其特征在于,若油门踏板开度为0且车辆不满足所述预设的安全行驶条件,则控制状态机进入过渡状态之后,还包括:
4.根据权利要求1所述的全速自适应巡航的状态机迁移控制方法,其特征在于,在待机使能状态下,还包括:
5.根据权利要求1所述的全速自适应巡航的状态机迁移控制方法,其特征在于,在待机使能状态下,还包括:
6.根据权利要求1所述的全速自适应巡航的状态机迁移控制方法,其特征在于,在待机禁止状态下,还包括:
7.根据权利要求1-6任一项所述的全速自适应巡航的状态机迁移控制方法,其特征在于,所述预设的安全行驶条件包括:
8.一种自适应巡航的状态机迁移控制系统,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述的全速自适应巡航的状态机迁移控制方法。
10.一种车辆,其特征在于,包括如权利要求8所述的自适应巡航的状态机迁移控制系统或者如权利要求9所述的电子设备。
技术总结
本发明提供一种全速自适应巡航的状态机迁移控制方法、系统及车辆,属于自适应巡航领域,方法包括:车辆上电时,控制状态机进入禁止状态;在禁止状态下,若FSRA功能开关打开,控制状态机进入待机禁止状态;在待机禁止状态下,若车辆满足预设的安全行驶条件,则控制状态机进入待机使能状态;在待机使能状态下,若自适应巡航键被触发,则控制状态机进入使能状态,以进行自适应巡航;在使能状态下,若油门踏板开度为0且车辆不满足预设的安全行驶条件,则控制状态机进入过渡状态;若满足预设的第一返回条件,则控制状态机返回待机禁止状态;若FSRA功能开关关闭,则控制状态机返回禁止状态。本发明能够保证车辆操控的可靠性和平顺性。
技术研发人员:李理
受保护的技术使用者:三一汽车制造有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!